Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Windows 11 All Keyboard ShortcutsDokument26 SeitenWindows 11 All Keyboard ShortcutsjohnNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Fortigate OS Command Line InterfaceDokument702 SeitenFortigate OS Command Line Interfacedirty_shadow100% (7)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Mathcad'S Program Function and Application in Teaching of MathDokument13 SeitenMathcad'S Program Function and Application in Teaching of Mathm_925Noch keine Bewertungen
- CF Lecture 04-Data AcquisitionDokument65 SeitenCF Lecture 04-Data AcquisitionFaisal Shahzad100% (1)
- Vulnerability Assessment and Penetration Testing IJERTV10IS050111Dokument6 SeitenVulnerability Assessment and Penetration Testing IJERTV10IS050111Vamsi KrishnaNoch keine Bewertungen
- SAP HANA 1909 BlogDokument3 SeitenSAP HANA 1909 BlogLovi SharmaNoch keine Bewertungen
- Sodick RS-232 ConnectionDokument17 SeitenSodick RS-232 ConnectionRodrigo Lopez CelisNoch keine Bewertungen
- 90206-1045DEG E Troubleshooting ManualDokument572 Seiten90206-1045DEG E Troubleshooting ManualVickocorp SlpNoch keine Bewertungen
- Secador Primus 20-75 LbsDokument60 SeitenSecador Primus 20-75 LbsCarlos Andres Jaimes Rico100% (2)
- Ecuacion de Mov 1 G de LibertadDokument3 SeitenEcuacion de Mov 1 G de Libertadjose2017Noch keine Bewertungen
- Problemas Propuestos Unidad 2: Natalia Carolina Gómez Valdez 17040884Dokument25 SeitenProblemas Propuestos Unidad 2: Natalia Carolina Gómez Valdez 17040884jose2017Noch keine Bewertungen
- Problemas Propuestos Unidad 2: Natalia Carolina Gómez Valdez 17040884Dokument25 SeitenProblemas Propuestos Unidad 2: Natalia Carolina Gómez Valdez 17040884jose2017Noch keine Bewertungen
- Aplicaciones DInamicaDokument2 SeitenAplicaciones DInamicajose2017Noch keine Bewertungen
- Problema de Aplicación Parte 2Dokument3 SeitenProblema de Aplicación Parte 2jose2017Noch keine Bewertungen
- Clasificacion Edps PDFDokument8 SeitenClasificacion Edps PDFYamili ChávezNoch keine Bewertungen
- Problemas de AplicaciónDokument3 SeitenProblemas de Aplicaciónjose2017Noch keine Bewertungen
- Integral de LineaDokument4 SeitenIntegral de Lineajose2017Noch keine Bewertungen
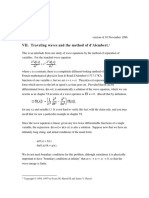
- VII. Traveling Waves and The Method of D'alembertDokument22 SeitenVII. Traveling Waves and The Method of D'alembertjose2017Noch keine Bewertungen
- Electricidad y MagnetismoDokument4 SeitenElectricidad y Magnetismojose2017Noch keine Bewertungen
- Class 1Dokument3 SeitenClass 1jose2017Noch keine Bewertungen
- Transformada de FourierDokument9 SeitenTransformada de Fourierjose2017Noch keine Bewertungen
- Transformada de FourierDokument9 SeitenTransformada de Fourierjose2017Noch keine Bewertungen
- Clasificacion Edps PDFDokument8 SeitenClasificacion Edps PDFYamili ChávezNoch keine Bewertungen
- Detección de Daño EstrructuralDokument19 SeitenDetección de Daño Estrructuraljose2017Noch keine Bewertungen
- Apendice B Transformada de FourierDokument15 SeitenApendice B Transformada de Fourierjose2017Noch keine Bewertungen
- Función de BesselDokument11 SeitenFunción de Besseljose2017Noch keine Bewertungen
- X. Pdes On A DiskDokument5 SeitenX. Pdes On A Diskjose2017Noch keine Bewertungen
- Transformada de FourierDokument9 SeitenTransformada de Fourierjose2017Noch keine Bewertungen
- Linear Methods of Applied Mathematics Evans M. Harrell II and James V. HerodDokument16 SeitenLinear Methods of Applied Mathematics Evans M. Harrell II and James V. Herodjose2017Noch keine Bewertungen
- VI. Notes (Played) On The Vibrating StringDokument20 SeitenVI. Notes (Played) On The Vibrating Stringjose2017Noch keine Bewertungen
- Ix. Pdes in SpaceDokument14 SeitenIx. Pdes in Spacejose2017Noch keine Bewertungen
- V. Differentiating Fourier Series: Example V.1. Let F (N, X) : 0 If - 1/nDokument5 SeitenV. Differentiating Fourier Series: Example V.1. Let F (N, X) : 0 If - 1/njose2017Noch keine Bewertungen
- Notas de Dinamica Clase 9Dokument11 SeitenNotas de Dinamica Clase 9jose2017Noch keine Bewertungen
- Fortran RunDokument1 SeiteFortran Runjose2017Noch keine Bewertungen
- III. Fourier Series. IntroductionDokument11 SeitenIII. Fourier Series. Introductionjose2017Noch keine Bewertungen
- Low Cost Arduino BasedDokument6 SeitenLow Cost Arduino Basedraeljohn273Noch keine Bewertungen
- CookieDokument1 SeiteCookieJorge Souza Só ResenhasNoch keine Bewertungen
- Network Attack Detection and Visual Payload LabeliDokument12 SeitenNetwork Attack Detection and Visual Payload LabeliBeria SimNoch keine Bewertungen
- GPS 175/GNX 375/GNC 355 Part 23 AML STC Master Drawing ListDokument4 SeitenGPS 175/GNX 375/GNC 355 Part 23 AML STC Master Drawing ListlouisNoch keine Bewertungen
- F3 Computer Science-Data TransmissionDokument15 SeitenF3 Computer Science-Data TransmissionIss MeNoch keine Bewertungen
- OOAD Notes PDFDokument92 SeitenOOAD Notes PDFSherril Vincent100% (2)
- g3.140h Instruction ManualDokument72 Seiteng3.140h Instruction Manualgiordanoassandri_343Noch keine Bewertungen
- Kang Wifi-Pisah Trafik RAW-2ISPDokument7 SeitenKang Wifi-Pisah Trafik RAW-2ISPAhmad Ismail0% (1)
- Algo TMO18315-V4.1-SG-Ed8Dokument640 SeitenAlgo TMO18315-V4.1-SG-Ed8SABER1980Noch keine Bewertungen
- How To React: Possibly Saw ThisDokument2 SeitenHow To React: Possibly Saw ThisArihant KumarNoch keine Bewertungen
- Bahasa Inggris Sma Ipa UnDokument9 SeitenBahasa Inggris Sma Ipa UnMartinus AdjieNoch keine Bewertungen
- Bus Route Enquiry System - TutorialsDuniyaDokument65 SeitenBus Route Enquiry System - TutorialsDuniya53-Nitya PatelNoch keine Bewertungen
- Module 5 - Introduction To WebApp DesignDokument10 SeitenModule 5 - Introduction To WebApp DesignMr. EpiphanyNoch keine Bewertungen
- Cambridge O Level: Computer Science 2210/22Dokument12 SeitenCambridge O Level: Computer Science 2210/22shabanaNoch keine Bewertungen
- Fundamentals of Computing Assignment QuestionDokument11 SeitenFundamentals of Computing Assignment QuestionMandip MandalNoch keine Bewertungen
- Iris Flower Species Identification Using Machine Learning ApproachDokument4 SeitenIris Flower Species Identification Using Machine Learning ApproachHANUMANTH RAJU R KNoch keine Bewertungen
- LAB # 13 Introduction and Installation of Django: Virtual EnvironmentDokument7 SeitenLAB # 13 Introduction and Installation of Django: Virtual EnvironmentAbdul RaoufNoch keine Bewertungen
- OS Practical FileDokument24 SeitenOS Practical FileRaghvinder YadavNoch keine Bewertungen
- Java by Bruce Heckel Part 1Dokument7 SeitenJava by Bruce Heckel Part 1sreerjvsNoch keine Bewertungen
- KST PLC ProConOS 40 enDokument35 SeitenKST PLC ProConOS 40 encheloooxxxNoch keine Bewertungen
- Chapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageDokument7 SeitenChapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageUmamNoch keine Bewertungen
- EXD2010 EX200: Compact Ex D Electro-Hydraulic Positioning and Monitoring SystemDokument8 SeitenEXD2010 EX200: Compact Ex D Electro-Hydraulic Positioning and Monitoring SystemKelvin Anthony OssaiNoch keine Bewertungen