Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Layout Solns 3Dokument12 SeitenLayout Solns 3VIKRAM KUMARNoch keine Bewertungen
- Extension of The Double-Ellipsoidal Heat Source Model Tonarrow-Groove and Keyhole Weld ConfigurationsDokument13 SeitenExtension of The Double-Ellipsoidal Heat Source Model Tonarrow-Groove and Keyhole Weld Configurationsal-masriNoch keine Bewertungen
- ARQ MagnetismDokument6 SeitenARQ Magnetismhy2709740Noch keine Bewertungen
- MSC - Nastran 2007 Implicit Nonlinear (SOL 600) User's GuideDokument532 SeitenMSC - Nastran 2007 Implicit Nonlinear (SOL 600) User's GuideDonNoch keine Bewertungen
- Stephen Mumford David Armstrong Philosophy Now Press 2007Dokument217 SeitenStephen Mumford David Armstrong Philosophy Now Press 2007DjLuga Ayd100% (3)
- Problem Set No. 1Dokument4 SeitenProblem Set No. 1Marc MathieuNoch keine Bewertungen
- Crystallization NotesDokument42 SeitenCrystallization NotesKTINE0894% (16)
- B.TECH IT FinalDokument135 SeitenB.TECH IT Finalk dharshiniNoch keine Bewertungen
- Mathematical ModellingDokument57 SeitenMathematical Modellingabcd2003959100% (8)
- Mekanika Teknik: Teknik Bangunan Dan Landasan 2018Dokument465 SeitenMekanika Teknik: Teknik Bangunan Dan Landasan 2018damdomie rasyidNoch keine Bewertungen
- PICASSO SNOLAB 12a 0Dokument44 SeitenPICASSO SNOLAB 12a 0Ivan FelisNoch keine Bewertungen
- CH16: Adsorption and Ion ExchangeDokument5 SeitenCH16: Adsorption and Ion Exchangeangel matienzoNoch keine Bewertungen
- Unisa MOM3602 Theory of Machines III Mock Exam 2015 - Preparation Practice ProblemsDokument9 SeitenUnisa MOM3602 Theory of Machines III Mock Exam 2015 - Preparation Practice ProblemsDaniel MabengoNoch keine Bewertungen
- 5 Newton'S Laws of Motion: Chapter OutlineDokument175 Seiten5 Newton'S Laws of Motion: Chapter Outlinewafa nagiNoch keine Bewertungen
- (4104) DPP 32 50 B PDFDokument109 Seiten(4104) DPP 32 50 B PDFRAJDEEP DASNoch keine Bewertungen
- Enhanced Science 8 Portfolio 1 Quarter A.Y 2019-220 Ms. Genel R. YutucDokument3 SeitenEnhanced Science 8 Portfolio 1 Quarter A.Y 2019-220 Ms. Genel R. YutucVenicee EveNoch keine Bewertungen
- Multiple Integrals Over Non-Rectangular RegionsDokument21 SeitenMultiple Integrals Over Non-Rectangular RegionsCodrutaNoch keine Bewertungen
- The Gaseous State - JEE Mains PYQ 2020-2022Dokument73 SeitenThe Gaseous State - JEE Mains PYQ 2020-2022pankaj baidNoch keine Bewertungen
- Atomic Structure-EngDokument49 SeitenAtomic Structure-EngUğurörengülNoch keine Bewertungen
- Hydraulic Machine PPT Updated 08-09-2023Dokument108 SeitenHydraulic Machine PPT Updated 08-09-2023ghostsnimitzNoch keine Bewertungen
- Construction Vibrations and Their Impact On Vibrat PDFDokument10 SeitenConstruction Vibrations and Their Impact On Vibrat PDFAngel PaulNoch keine Bewertungen
- Radiation Dose Summary TableDokument1 SeiteRadiation Dose Summary Tablestellacfierce_243120Noch keine Bewertungen
- Thermal Stress GlassDokument16 SeitenThermal Stress GlassVinicius PetrucciNoch keine Bewertungen
- Electromagnetic I EELE 3331: Electrostatic FieldsDokument84 SeitenElectromagnetic I EELE 3331: Electrostatic Fieldsmae100% (1)
- AWS90 Ch05 ModalDokument24 SeitenAWS90 Ch05 ModalCinitha ANoch keine Bewertungen
- Assignment 1Dokument3 SeitenAssignment 1Marsha WongNoch keine Bewertungen
- Impulse-Momentum RelationDokument2 SeitenImpulse-Momentum RelationMartha Glorie Manalo WallisNoch keine Bewertungen
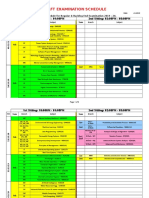
- Draft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMDokument8 SeitenDraft Examination Schedule: 1st Sitting: 10:00AM - 01:00PM 2nd Sitting: 02:00PM - 05:00PMBiswajit mallickNoch keine Bewertungen
- An Introduction To CryogenicsDokument10 SeitenAn Introduction To CryogenicsYasir Ali100% (1)
- Plane Stress - MSE 305-1Dokument149 SeitenPlane Stress - MSE 305-1Oloyede RidwanNoch keine Bewertungen