Das könnte Ihnen auch gefallen
- Neural Network and Fuzzy LogicDokument54 SeitenNeural Network and Fuzzy Logicshreyas sr100% (1)
- Artificial Neural Network: Lecture Module 22Dokument54 SeitenArtificial Neural Network: Lecture Module 22Ninni SinghNoch keine Bewertungen
- Neural NetworksDokument54 SeitenNeural NetworksJay AjwaniNoch keine Bewertungen
- Lecture 10 Neural NetworkDokument34 SeitenLecture 10 Neural NetworkMohsin IqbalNoch keine Bewertungen
- Artificial Neural NetworkDokument16 SeitenArtificial Neural Networkmk100% (1)
- Artificial Neural Network (ANN) : Duration: 8 Hrs OutlineDokument61 SeitenArtificial Neural Network (ANN) : Duration: 8 Hrs Outlineanhtu9_910280373Noch keine Bewertungen
- Neural Network PresentationDokument33 SeitenNeural Network PresentationMohd Yaseen100% (4)
- NeuralDokument53 SeitenNeuralPankaj MandloiNoch keine Bewertungen
- P1 - Single Layer Feed Forward NetworksDokument52 SeitenP1 - Single Layer Feed Forward NetworksYashaswiniNoch keine Bewertungen
- Neural NetworkDokument54 SeitenNeural NetworkPratik Agrawal100% (1)
- Artificial Neural NetworksDokument61 SeitenArtificial Neural NetworksNikhil Kumar sarwgiNoch keine Bewertungen
- ANN-Implemetation of Back-PropDokument89 SeitenANN-Implemetation of Back-PropDragon HallNoch keine Bewertungen
- Multi Layer PerceptronDokument62 SeitenMulti Layer PerceptronKishan Kumar GuptaNoch keine Bewertungen
- Least Mean Square (LMS) Algorithm: 3.1 Spatial FilteringDokument16 SeitenLeast Mean Square (LMS) Algorithm: 3.1 Spatial FilteringterrorindarknessNoch keine Bewertungen
- l15 16 AutoencodersDokument26 Seitenl15 16 AutoencodersRajakumar AwaradiNoch keine Bewertungen
- 3 DeltaRule PDFDokument10 Seiten3 DeltaRule PDFEs ENoch keine Bewertungen
- Chapter 07 Artificial Neural NetworkDokument62 SeitenChapter 07 Artificial Neural NetworkRijesh ShresthaNoch keine Bewertungen
- Supervised Learning Neural NetworksDokument34 SeitenSupervised Learning Neural NetworksLekshmiNoch keine Bewertungen
- CNN and Gan: Introduction ToDokument58 SeitenCNN and Gan: Introduction ToGopiNath VelivelaNoch keine Bewertungen
- A Presentation On: By: EdutechlearnersDokument33 SeitenA Presentation On: By: EdutechlearnersshardapatelNoch keine Bewertungen
- Business Intelligence & Data Mining-10Dokument39 SeitenBusiness Intelligence & Data Mining-10binzidd007Noch keine Bewertungen
- ANN PG Module1Dokument75 SeitenANN PG Module1Sreerag Kunnathu SugathanNoch keine Bewertungen
- Classification AdvancedDokument51 SeitenClassification AdvancedBHADORIYA ADITYASINHNoch keine Bewertungen
- 0905 Cs 161183 VishalDokument38 Seiten0905 Cs 161183 VishalVishal JainNoch keine Bewertungen
- Data Mining Techniques: Presentation On Neural NetworkDokument55 SeitenData Mining Techniques: Presentation On Neural NetworkSushant WaghmareNoch keine Bewertungen
- 4.2 AnnDokument26 Seiten4.2 AnnMatrix BotNoch keine Bewertungen
- Highly Interconnected Processing Elements: 1. Neural Network ArchitecturesDokument7 SeitenHighly Interconnected Processing Elements: 1. Neural Network ArchitecturesMD AJMALNoch keine Bewertungen
- Neuron ModelDokument8 SeitenNeuron Modelعبد السلام حسينNoch keine Bewertungen
- Cheatsheet Deep LearningDokument2 SeitenCheatsheet Deep LearningMichelleHanNoch keine Bewertungen
- 3 2MLP Extra NotesDokument27 Seiten3 2MLP Extra Notesyoussef hossamNoch keine Bewertungen
- Ar$ficial Neural Network - : Adaline and MadalineDokument22 SeitenAr$ficial Neural Network - : Adaline and MadalineFaslil FawaidiNoch keine Bewertungen
- Foundations of Machine Learning: Module 6: Neural NetworkDokument14 SeitenFoundations of Machine Learning: Module 6: Neural NetworkNishant TiwariNoch keine Bewertungen
- Ann 2Dokument22 SeitenAnn 2Jeril Joy JosephNoch keine Bewertungen
- Lesson 3 Artificial Neural NetworkDokument77 SeitenLesson 3 Artificial Neural NetworkVIJENDHER REDDY GURRAMNoch keine Bewertungen
- Neural NetworksDokument45 SeitenNeural NetworksDiễm Quỳnh TrầnNoch keine Bewertungen
- Shallow Neural NetworkDokument152 SeitenShallow Neural NetworkSreetam GangulyNoch keine Bewertungen
- Artifical Neural Networks - Lect - 2Dokument16 SeitenArtifical Neural Networks - Lect - 2ma5395822Noch keine Bewertungen
- Soft ComputingDokument40 SeitenSoft ComputingEco Frnd Nikhil ChNoch keine Bewertungen
- Model of A Neuron:: WWW - Pes.eduDokument7 SeitenModel of A Neuron:: WWW - Pes.edushrilaxmi bhatNoch keine Bewertungen
- Artificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeDokument43 SeitenArtificial Neural Networks: System That Can Acquire, Store, and Utilize Experiential KnowledgeUtkarsh AgarwalNoch keine Bewertungen
- Back Propagation in NNDokument30 SeitenBack Propagation in NNShubhamNoch keine Bewertungen
- NN 2Dokument42 SeitenNN 2Ku LotNoch keine Bewertungen
- Thirteen 19240 PDFDokument17 SeitenThirteen 19240 PDFRam Bhagat SoniNoch keine Bewertungen
- Neural Network: Sudipta RoyDokument25 SeitenNeural Network: Sudipta RoymanNoch keine Bewertungen
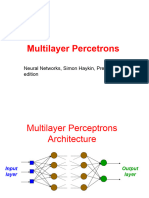
- Multi Layer Perceptron HaykinDokument50 SeitenMulti Layer Perceptron HaykinAFFIFA JAHAN ANONNANoch keine Bewertungen
- Artificial Neural Network: Presentation By: C. Vinoth Kumar SSN College of EngineeringDokument9 SeitenArtificial Neural Network: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiNoch keine Bewertungen
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Dokument20 SeitenHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaNoch keine Bewertungen
- Neural Net 3rdclassDokument35 SeitenNeural Net 3rdclassUttam SatapathyNoch keine Bewertungen
- Artificial Neural NetworkDokument26 SeitenArtificial Neural NetworkUpendra YadavNoch keine Bewertungen
- Neuron Model: Sigmoidal FunctionDokument15 SeitenNeuron Model: Sigmoidal FunctionPooja PatwariNoch keine Bewertungen
- Neural NetworksDokument42 SeitenNeural NetworksTharun RaajNoch keine Bewertungen
- 3 ArtificialNeuralNetworks PDFDokument77 Seiten3 ArtificialNeuralNetworks PDFRahul PariNoch keine Bewertungen
- L 22 NNpracticalDokument15 SeitenL 22 NNpracticalAyaan KhanNoch keine Bewertungen
- Artificial Intelligence CS-3431w (V2)Dokument37 SeitenArtificial Intelligence CS-3431w (V2)Nisha IdreesNoch keine Bewertungen
- Q: What Is ANN?: X H X H X H X X X HDokument9 SeitenQ: What Is ANN?: X H X H X H X X X HMuhammad Ahsan AkhtarNoch keine Bewertungen
- The Failure of The Perceptron To Successfully Simple Problem Such As XOR (Minsky and Papert)Dokument13 SeitenThe Failure of The Perceptron To Successfully Simple Problem Such As XOR (Minsky and Papert)iamumpidiNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningVon EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNoch keine Bewertungen
- The First Handheld Sound Camera For Everyone: Product DataDokument2 SeitenThe First Handheld Sound Camera For Everyone: Product Datamalini72Noch keine Bewertungen
- Electric Vehicle Battery Management Algorithm Development-2016Dokument12 SeitenElectric Vehicle Battery Management Algorithm Development-2016malini72Noch keine Bewertungen
- A Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode ComponentsDokument11 SeitenA Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode Componentsmalini72Noch keine Bewertungen
- Laboratory Experiment 4 EE348L Spring 2005Dokument19 SeitenLaboratory Experiment 4 EE348L Spring 2005malini72Noch keine Bewertungen
- Two-Terminal Device: Peter Mathys ECEN 1400Dokument3 SeitenTwo-Terminal Device: Peter Mathys ECEN 1400malini72Noch keine Bewertungen
- Electronics1 Laboratory Manual PDFDokument61 SeitenElectronics1 Laboratory Manual PDFmalini72Noch keine Bewertungen
- Nonisolated High Gain DC-DC Converter For DC MicrogridsDokument8 SeitenNonisolated High Gain DC-DC Converter For DC Microgridsmalini72Noch keine Bewertungen
- Analysis of Permanent Magnet Synchronous MotorDokument15 SeitenAnalysis of Permanent Magnet Synchronous Motormalini72Noch keine Bewertungen
- Energy Saving in Labs: Even Basic Things Make A Difference..Dokument1 SeiteEnergy Saving in Labs: Even Basic Things Make A Difference..malini72Noch keine Bewertungen
- Energyauditofhigginslabs PDFDokument144 SeitenEnergyauditofhigginslabs PDFmalini72Noch keine Bewertungen
- Lecture8 PDFDokument20 SeitenLecture8 PDFmalini72Noch keine Bewertungen
- Lecture 8A Unit Commitment Part 1Dokument25 SeitenLecture 8A Unit Commitment Part 1malini72Noch keine Bewertungen