Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- VOLVO DD112HF ASPHALT COMPACTOR Service Repair Manual PDFDokument15 SeitenVOLVO DD112HF ASPHALT COMPACTOR Service Repair Manual PDFfjjsjekdmme100% (1)
- Machine Design Reviewer - Complete PDFDokument104 SeitenMachine Design Reviewer - Complete PDFRae Nikka May Pablo83% (24)
- Putzmeister ListDokument10 SeitenPutzmeister ListYusco Novi Pazar75% (4)
- Basic Electric Motor Maintenance: Ed Robinson Regional Service MangerDokument48 SeitenBasic Electric Motor Maintenance: Ed Robinson Regional Service MangerIslam Fawzy100% (1)
- Radial Piston Motor Bosch Rexroth Hagglunds CB 1422820525 PDFDokument48 SeitenRadial Piston Motor Bosch Rexroth Hagglunds CB 1422820525 PDFHernando Salamanca100% (2)
- Internal Gear Pump: Replaces: 03.08 Material No. R901216585 Type PGH.-3XDokument36 SeitenInternal Gear Pump: Replaces: 03.08 Material No. R901216585 Type PGH.-3XbiabamanbemanNoch keine Bewertungen
- Doc001645 1-EnDokument4 SeitenDoc001645 1-Enpercy f.fNoch keine Bewertungen
- Water/Wastewater: IndustryDokument16 SeitenWater/Wastewater: IndustryFrancisco ChaconNoch keine Bewertungen
- Piaggio Beverly Sport Touring 350 (EN)Dokument346 SeitenPiaggio Beverly Sport Touring 350 (EN)Manualles94% (16)
- Kratft Fluid CouplingsDokument32 SeitenKratft Fluid CouplingsAnibal Aldava CrispinNoch keine Bewertungen
- Machine Guarding PDFDokument133 SeitenMachine Guarding PDFbrsharmaNoch keine Bewertungen
- DERRICK MudAgitatorDokument4 SeitenDERRICK MudAgitatorparkerworkerNoch keine Bewertungen
- Effects of MisalignmentDokument50 SeitenEffects of MisalignmentRana RandhirNoch keine Bewertungen
- JTM Series Machine Screw Jack, Gear Machine Jacks, Machine Screw Lift, Machine Screw Actuator, Worm Gear Machine Screw Jack, Metric Machine Screw Jack, Mechanical Actuators Machine Screw ActuatorsDokument37 SeitenJTM Series Machine Screw Jack, Gear Machine Jacks, Machine Screw Lift, Machine Screw Actuator, Worm Gear Machine Screw Jack, Metric Machine Screw Jack, Mechanical Actuators Machine Screw ActuatorsWarren Lee0% (1)
- KINETROL Actuators 1180006.0.820.0157.4.00 - Spare Parts ListDokument2 SeitenKINETROL Actuators 1180006.0.820.0157.4.00 - Spare Parts Listritchie_ardaniNoch keine Bewertungen
- Safety Manual - Carrier Mounted Hydraulic BreakerDokument67 SeitenSafety Manual - Carrier Mounted Hydraulic BreakerWILSON JAVIER CORREDOR TALERONoch keine Bewertungen
- 9 - Flanged Bolt CouplingDokument15 Seiten9 - Flanged Bolt CouplingPatrick Antonio Orge ChingNoch keine Bewertungen
- Manual Motores Toshiba MVDokument41 SeitenManual Motores Toshiba MVCarlos Fiorillo100% (1)
- JFELION-TP-M-001 JFELION Running Manual Rev20 20231013143706Dokument21 SeitenJFELION-TP-M-001 JFELION Running Manual Rev20 20231013143706ANSHARULLAH HASSANNoch keine Bewertungen
- INSTALL Vogel MP 12 Im de FR en enDokument65 SeitenINSTALL Vogel MP 12 Im de FR en enGUZMANNoch keine Bewertungen
- Installation Manual: TG-13/-17 Governor and TG-13E/-17E ActuatorDokument20 SeitenInstallation Manual: TG-13/-17 Governor and TG-13E/-17E ActuatorEdy AlamNoch keine Bewertungen
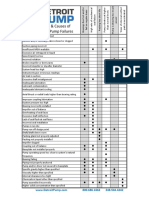
- Mechanical Pump Failures Symptoms-Causes PDFDokument1 SeiteMechanical Pump Failures Symptoms-Causes PDFFELIPE ANDRÉS OLIVARES CODOCEONoch keine Bewertungen
- Machine Maintenance Manual-June2010 PDFDokument25 SeitenMachine Maintenance Manual-June2010 PDFManibalanNoch keine Bewertungen
- Metal Bellows Engineering Applications White PaperDokument14 SeitenMetal Bellows Engineering Applications White PaperKhalidPeerNoch keine Bewertungen
- 2 ShaftsDokument24 Seiten2 Shaftsrdksj100% (1)
- ZF 85 IvDokument4 SeitenZF 85 IvAhmet GelişliNoch keine Bewertungen
- 070.610-Iom Rwfii 2017-04 PDFDokument72 Seiten070.610-Iom Rwfii 2017-04 PDFyoye1968100% (1)
- A2 Drive Nut ReplacementDokument7 SeitenA2 Drive Nut ReplacementJibjab7100% (1)
- Montaje de Ventilador Cooling Tower 2Dokument12 SeitenMontaje de Ventilador Cooling Tower 2Ale HqzNoch keine Bewertungen
- Technical Specifications For LPG Tank TruckDokument11 SeitenTechnical Specifications For LPG Tank TruckDayo Idowu100% (2)