Das könnte Ihnen auch gefallen
- s10 TR Tank Rupture TutorialDokument79 Seitens10 TR Tank Rupture TutorialLyuNoch keine Bewertungen
- Current in Multiple of In: Cutler-Hammer Type FWC Molded-Case Circuit BreakersDokument1 SeiteCurrent in Multiple of In: Cutler-Hammer Type FWC Molded-Case Circuit Breakersbaskaranjay5502Noch keine Bewertungen
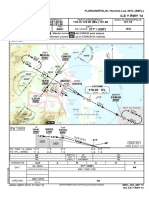
- SBFL Ils-Y-Rwy-14 Iac 20211202Dokument1 SeiteSBFL Ils-Y-Rwy-14 Iac 20211202gameplayPSNoch keine Bewertungen
- Tolerance in Size Dept/Nrp: Designed: HBSP Modeled: HHDokument1 SeiteTolerance in Size Dept/Nrp: Designed: HBSP Modeled: HHBandungmechatronics CenterNoch keine Bewertungen
- BBS For RCC Concrete StructureDokument19 SeitenBBS For RCC Concrete Structurearslan jabbarNoch keine Bewertungen
- SBFL Ils-Y-Rwy-14 Iac 20191107Dokument1 SeiteSBFL Ils-Y-Rwy-14 Iac 20191107Rômullo Furtado BeltrameNoch keine Bewertungen
- 01-Abb Turbocharger Presentation Mari-Tech 2010Dokument48 Seiten01-Abb Turbocharger Presentation Mari-Tech 2010guichen wangNoch keine Bewertungen
- Ball MillDokument7 SeitenBall MillAndres Acosta RozoNoch keine Bewertungen
- IBC MonoSol 315 VL5 - Data Sheet Global - EN PDFDokument2 SeitenIBC MonoSol 315 VL5 - Data Sheet Global - EN PDFmilosgmilanovicNoch keine Bewertungen
- (IAC) Ilswcati&Iirwy15: Refer To MNM N/ADokument1 Seite(IAC) Ilswcati&Iirwy15: Refer To MNM N/ALuiz SantosNoch keine Bewertungen
- 304 01380 0 M42SP 12KDokument2 Seiten304 01380 0 M42SP 12KMarle ReginoNoch keine Bewertungen
- RC Beam Strength Check ResultsDokument1 SeiteRC Beam Strength Check ResultsJansen ParallagNoch keine Bewertungen
- Uv-400 Series Superflood™: Our Most Powerful Uv-A Flood Lamps Designed Specifi Cally For NDTDokument1 SeiteUv-400 Series Superflood™: Our Most Powerful Uv-A Flood Lamps Designed Specifi Cally For NDTzaw lin ooNoch keine Bewertungen
- CSI - KuMax - CS3U 360 375 MS PDFDokument2 SeitenCSI - KuMax - CS3U 360 375 MS PDFWagner RochaNoch keine Bewertungen
- PANELSDokument3 SeitenPANELSsmassad.85Noch keine Bewertungen
- ETEK Solar PV System 2023Dokument62 SeitenETEK Solar PV System 2023ELECTROSTATIC SPRAYERS GREECENoch keine Bewertungen
- gb1 MergedDokument7 Seitengb1 MergedNyx Phoebe WPNoch keine Bewertungen
- Single Line Diagram Shows Transformer and Panel Board Fault CalculationsDokument15 SeitenSingle Line Diagram Shows Transformer and Panel Board Fault CalculationsMichael DarmstaedterNoch keine Bewertungen
- Maersk Convincer-Time Curve - LDV-2XDokument1 SeiteMaersk Convincer-Time Curve - LDV-2XVu Tuan PhongNoch keine Bewertungen
- STAAD - Pro Report: Job InformationDokument20 SeitenSTAAD - Pro Report: Job Informationsultan setiawanNoch keine Bewertungen
- Specifications: (Stationary) (Mobile)Dokument2 SeitenSpecifications: (Stationary) (Mobile)ЮрийNoch keine Bewertungen
- IEEE485-Compliant Battery Sizing for 125VDC BankDokument1 SeiteIEEE485-Compliant Battery Sizing for 125VDC BankaliNoch keine Bewertungen
- IEC 61400 JUSTIFICATION E30/70 PRO SLM AnalysisDokument120 SeitenIEC 61400 JUSTIFICATION E30/70 PRO SLM AnalysisAyan MajiNoch keine Bewertungen
- Project: Location: C-Store DB No: Db-C3 A Fed From:Smdb-CDokument1 SeiteProject: Location: C-Store DB No: Db-C3 A Fed From:Smdb-ChaseebamerNoch keine Bewertungen
- Al Zoura Load Schelude-Rev-01 - (Actual Ac Load)Dokument1 SeiteAl Zoura Load Schelude-Rev-01 - (Actual Ac Load)haseebamerNoch keine Bewertungen
- AP4439GMT-HF CharacteristicsDokument1 SeiteAP4439GMT-HF CharacteristicsIj OooNoch keine Bewertungen
- Balok Anak LantaiDokument5 SeitenBalok Anak LantaiSipil27 IndoNoch keine Bewertungen
- Kumax: Super High Efficiency Poly Cs3U-345 - 350 - 355 - 360PDokument2 SeitenKumax: Super High Efficiency Poly Cs3U-345 - 350 - 355 - 360PLorenzoNoch keine Bewertungen
- CSI - KuMax - CS3U 345 360 P PDFDokument2 SeitenCSI - KuMax - CS3U 345 360 P PDFWagner RochaNoch keine Bewertungen
- Darpa3 Pista 10Dokument1 SeiteDarpa3 Pista 10Daniel RodríguezNoch keine Bewertungen
- 8 Way Single Bus Bar DB Power DB (DB P) For Substation Natc 3PH, 415V, 50Hz 40A TP MCCBDokument1 Seite8 Way Single Bus Bar DB Power DB (DB P) For Substation Natc 3PH, 415V, 50Hz 40A TP MCCBArshad KhanNoch keine Bewertungen
- Trina Solar Honey M TSM De08m 08 360 385w Scheda Tecnica Moduli Fotovoltaici MonocristalliniDokument2 SeitenTrina Solar Honey M TSM De08m 08 360 385w Scheda Tecnica Moduli Fotovoltaici MonocristalliniFrengo6388Noch keine Bewertungen
- AA ARM2017 Vibration AnalysisDokument39 SeitenAA ARM2017 Vibration Analysismahmoud fawzyNoch keine Bewertungen
- 48 Design of Stair ColumnDokument1 Seite48 Design of Stair Columnsoumi bhattacharyaNoch keine Bewertungen
- SBGP - RNP y Rwy 20l Ar - Iac - 20211230Dokument1 SeiteSBGP - RNP y Rwy 20l Ar - Iac - 20211230Alastair DackNoch keine Bewertungen
- Patriot6000 8000 9500Dokument46 SeitenPatriot6000 8000 9500Rogelio TafoyaNoch keine Bewertungen
- RC Beam Design Results for 5-Storey BuildingDokument1 SeiteRC Beam Design Results for 5-Storey BuildingCARL JAMESNoch keine Bewertungen
- Date DRN by CHKD by Apprd by Scale 29-12-23Dokument1 SeiteDate DRN by CHKD by Apprd by Scale 29-12-23gepsofodruNoch keine Bewertungen
- Beam Diagrams: B1: B.M.D. (N-M)Dokument4 SeitenBeam Diagrams: B1: B.M.D. (N-M)QuiyuchSNoch keine Bewertungen
- MT Series: 50-80Kw I 4 Mppts I Three PhaseDokument2 SeitenMT Series: 50-80Kw I 4 Mppts I Three PhaseMohsin SaifiNoch keine Bewertungen
- Datasheet Trina Tallmax TSM-455 DE17MIIDokument2 SeitenDatasheet Trina Tallmax TSM-455 DE17MIIAngel FNoch keine Bewertungen
- VTBS 21-7Dokument1 SeiteVTBS 21-7wong keen faivNoch keine Bewertungen
- SINGLE LINE DIAGRAM AND CALCULATIONS FOR SUBSTATIONDokument5 SeitenSINGLE LINE DIAGRAM AND CALCULATIONS FOR SUBSTATIONMichael DarmstaedterNoch keine Bewertungen
- ACI318-08 Circular Column Design AnalysisDokument6 SeitenACI318-08 Circular Column Design Analysisazamislam726537Noch keine Bewertungen
- BEAM 5m ACI-318-11Dokument1 SeiteBEAM 5m ACI-318-11AWOUNANGNoch keine Bewertungen
- Лебёдка RE-8000-10000-12000-12000X-1Dokument20 SeitenЛебёдка RE-8000-10000-12000-12000X-1SanyaKlimNoch keine Bewertungen
- Acfrogaf1d 25kzbcr7ufunghbtj72ftye9gwfon5rcr2lepbbkboiq7srv48kvglanseotn5i Hdps1ohnfqmxhv Hxoyewyr2 For4esytophhkcbmarqviohlhaeDokument2 SeitenAcfrogaf1d 25kzbcr7ufunghbtj72ftye9gwfon5rcr2lepbbkboiq7srv48kvglanseotn5i Hdps1ohnfqmxhv Hxoyewyr2 For4esytophhkcbmarqviohlhaeNurmuliana Abdul WahabNoch keine Bewertungen
- Transition to concrete wallDokument1 SeiteTransition to concrete wallRichard FloresNoch keine Bewertungen
- 430W 450W Astrosemi: Incredible Power For Small Body Monocrystalline PV ModuleDokument2 Seiten430W 450W Astrosemi: Incredible Power For Small Body Monocrystalline PV ModuleMuhammad MohsinNoch keine Bewertungen
- b1 PDFDokument1 Seiteb1 PDFCARL JAMESNoch keine Bewertungen
- ZOOMLION ZE215E Crawler ExcavatorDokument2 SeitenZOOMLION ZE215E Crawler Excavatorcesarmroldan100% (2)
- Midas Gen: 1. Design InformationDokument1 SeiteMidas Gen: 1. Design InformationPanupong PuangngamNoch keine Bewertungen
- Zechmeister Et Al. 2013 Page 37Dokument1 SeiteZechmeister Et Al. 2013 Page 37Pierre-Cécil KönigNoch keine Bewertungen
- Damping of Resonances at Energization of Power Transformers in ADokument6 SeitenDamping of Resonances at Energization of Power Transformers in ARoberto SNoch keine Bewertungen
- Felipe Villalobos Oxford University 8 December 2004, Civil Group, OxfordDokument14 SeitenFelipe Villalobos Oxford University 8 December 2004, Civil Group, OxfordRajaa KodadNoch keine Bewertungen
- AU Datasheet TallmaxM DE17M (II) 2020D 0Dokument2 SeitenAU Datasheet TallmaxM DE17M (II) 2020D 0Jeff AlcantaraNoch keine Bewertungen
- LT Panel Baseframe Calculation MaxDokument1 SeiteLT Panel Baseframe Calculation MaxPREM SHANKARNoch keine Bewertungen
- IEC - Extremely InverseDokument1 SeiteIEC - Extremely InverseLaura AgudeloNoch keine Bewertungen
- Understanding Lightning and Lightning Protection: A Multimedia Teaching GuideVon EverandUnderstanding Lightning and Lightning Protection: A Multimedia Teaching GuideNoch keine Bewertungen
- Komatsu PC3000-6E hydraulic shovel product specificationDokument70 SeitenKomatsu PC3000-6E hydraulic shovel product specificationDewa GV100% (1)
- Sinda Fluint User ManualDokument1.488 SeitenSinda Fluint User Manual현철봉Noch keine Bewertungen
- (Peter Freeth) The NLP Trainer Training ManualDokument221 Seiten(Peter Freeth) The NLP Trainer Training ManualDzung Nguyen100% (4)
- The Effectiveness of Low Fidelity Simulation in The Training of Undergraduate Nursing Students Survey of Fourth Year Students in Buea Municipality, Fako DivisionDokument16 SeitenThe Effectiveness of Low Fidelity Simulation in The Training of Undergraduate Nursing Students Survey of Fourth Year Students in Buea Municipality, Fako DivisionEditor IJTSRDNoch keine Bewertungen
- SPJIMR - PGPM Placement Brochure 2018Dokument80 SeitenSPJIMR - PGPM Placement Brochure 2018vaibhavNoch keine Bewertungen
- Add updated UVM libraries to old QuestaSimDokument2 SeitenAdd updated UVM libraries to old QuestaSimNageswara RaoNoch keine Bewertungen
- Fault Detection and Classification Using Machine LearningDokument9 SeitenFault Detection and Classification Using Machine LearningIJRASETPublicationsNoch keine Bewertungen
- Plastic PolutionDokument147 SeitenPlastic Polutionluis100% (1)
- Mike21 HD Step by StepDokument48 SeitenMike21 HD Step by SteparmyandaNoch keine Bewertungen
- Project-II Final ReportDokument54 SeitenProject-II Final Reportsharanjeet singhNoch keine Bewertungen
- Relay-Performance - Estados Del SEPDokument3 SeitenRelay-Performance - Estados Del SEPquisi123Noch keine Bewertungen
- Manageable, Original Research for DissertationsDokument12 SeitenManageable, Original Research for Dissertationskarla joy 05Noch keine Bewertungen
- Rotating Wheels - Their Impact On Wind Tunnel Test Techniques and On Vehicle Drag ResultsDokument19 SeitenRotating Wheels - Their Impact On Wind Tunnel Test Techniques and On Vehicle Drag ResultsKanhaiyaPrasadNoch keine Bewertungen
- Rma2 PDFDokument240 SeitenRma2 PDFRindu Trisna WidiastutiNoch keine Bewertungen
- Citric AcidDokument7 SeitenCitric AcidMd Tanvir FarabiNoch keine Bewertungen
- Cox PH and Frailty Models for Unobserved CovariatesDokument13 SeitenCox PH and Frailty Models for Unobserved CovariatesRoxanne CaruanaNoch keine Bewertungen
- Create a Swinging Wrecking Ball in 3D Studio MaxDokument10 SeitenCreate a Swinging Wrecking Ball in 3D Studio MaxAyman66Noch keine Bewertungen
- Hysys CompressDokument4 SeitenHysys CompressVidyasenNoch keine Bewertungen
- Questa Sim Handbook7Dokument26 SeitenQuesta Sim Handbook7Jeevith PaulNoch keine Bewertungen
- Cooja Simulator Step by Step Manual: January 2020Dokument68 SeitenCooja Simulator Step by Step Manual: January 2020Azhar ANoch keine Bewertungen
- 00 Introducción e Historia CFDDokument8 Seiten00 Introducción e Historia CFDInés PetrinaNoch keine Bewertungen
- Modeling SMT Line to Improve ThroughputDokument6 SeitenModeling SMT Line to Improve Throughputgautham VNoch keine Bewertungen
- Little Book of Testing-V1Dokument24 SeitenLittle Book of Testing-V1basavak1980Noch keine Bewertungen
- Dalal Sejal PDokument9 SeitenDalal Sejal PSaurabh PednekarNoch keine Bewertungen
- Technical Competence in Surgeons (2012)Dokument9 SeitenTechnical Competence in Surgeons (2012)Carlos CervantesNoch keine Bewertungen
- A Housing Demand Model - A Case Study of The Bangkok Metropolitan Region, ThailandDokument344 SeitenA Housing Demand Model - A Case Study of The Bangkok Metropolitan Region, Thailand129935Noch keine Bewertungen
- Download Automation Studio P6 with crack and modulesDokument2 SeitenDownload Automation Studio P6 with crack and modulesArifin Jr.Noch keine Bewertungen
- Business Model Canvas for SkinBeautyDokument5 SeitenBusiness Model Canvas for SkinBeautydinda syafiraNoch keine Bewertungen
- CS-FSTD (A) Issue 2 - Change InformationDokument57 SeitenCS-FSTD (A) Issue 2 - Change Informationadamstaw1Noch keine Bewertungen