Das könnte Ihnen auch gefallen
- Las Colecciones de Objetos Workbooks y WorksheetsDokument3 SeitenLas Colecciones de Objetos Workbooks y Worksheetsjose guevaraNoch keine Bewertungen
- Tabla Periódica, Configuración Electrónica y Enlace Químico de Los ElementosDokument4 SeitenTabla Periódica, Configuración Electrónica y Enlace Químico de Los Elementosvladimir divasNoch keine Bewertungen
- Seminario de Integración Y Práctica ProfesionalDokument8 SeitenSeminario de Integración Y Práctica ProfesionalMaria Victoria RodriguezNoch keine Bewertungen
- Prueba de Geometría de 7°Dokument2 SeitenPrueba de Geometría de 7°Vasquez RutyNoch keine Bewertungen
- Arte y MueblesDokument23 SeitenArte y MueblesjosfdzlevyNoch keine Bewertungen
- Lpa FinalDokument8 SeitenLpa Finaljhans carlos pinedo portillaNoch keine Bewertungen
- LeyendasDokument3 SeitenLeyendasBeOnii VillarrealNoch keine Bewertungen
- Sesión 3 Diferencias y Semejanzas Entre La Contabilidad Gerencial y La Contabilidad FinancieraDokument31 SeitenSesión 3 Diferencias y Semejanzas Entre La Contabilidad Gerencial y La Contabilidad FinancieraJEHYNER JESUS HUARACA GOITIANoch keine Bewertungen
- Poesía Popular InfantilDokument16 SeitenPoesía Popular InfantilMatías Rodríguez CárdenasNoch keine Bewertungen
- Células de La SangreDokument8 SeitenCélulas de La SangreMARCO ANTONIO RUIZ ONTÓNNoch keine Bewertungen
- Examen Medico PrevueloDokument33 SeitenExamen Medico PrevueloVivi D Arkness100% (1)
- School Brass 2Dokument13 SeitenSchool Brass 2my domp100% (1)
- El Benceno y Su Impacto en La Salud PúblicaDokument5 SeitenEl Benceno y Su Impacto en La Salud PúblicaSandra Ximena ForeroNoch keine Bewertungen
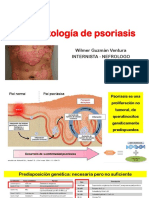
- Fisiopatología de Psoriasis: Wilmer Guzmán Ventura Internista - NefrologoDokument53 SeitenFisiopatología de Psoriasis: Wilmer Guzmán Ventura Internista - NefrologoMonica García Gutierrez100% (2)
- Evaluación de Primer Periodo Geometría NovenoDokument3 SeitenEvaluación de Primer Periodo Geometría NovenoAdriana Villa Uribe100% (1)
- 8411005.2013 Guia LabDokument185 Seiten8411005.2013 Guia LabJaqueline CarolNoch keine Bewertungen
- Tesis FinalDokument134 SeitenTesis FinalbarcesalaNoch keine Bewertungen
- Cuadro ComparativoDokument23 SeitenCuadro ComparativoADRIAN MICHAEL GUADALUPE LUALHATINoch keine Bewertungen
- ADA 6. Reporte de Investigación Sobre Un Hecho Relevante Ocurrido Entre 1964 y 1994 Desde El Punto de Vista de La Ingeniería.Dokument3 SeitenADA 6. Reporte de Investigación Sobre Un Hecho Relevante Ocurrido Entre 1964 y 1994 Desde El Punto de Vista de La Ingeniería.Luis Ángel Mézquita DíazNoch keine Bewertungen
- s700 B 900 Filters User Manual SpanishDokument4 Seitens700 B 900 Filters User Manual SpanishMario Antonio Araya MorosoNoch keine Bewertungen
- Qué Es El VerboDokument5 SeitenQué Es El Verbojuva2000-1100% (2)
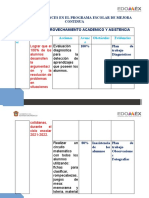
- Balance de Avances en El Programa Escolar de Mejora ContinuaDokument14 SeitenBalance de Avances en El Programa Escolar de Mejora ContinuaTay MaldonadoNoch keine Bewertungen
- Producción de Metabolitos Secundarios A Partir de Cultivo in VitroDokument18 SeitenProducción de Metabolitos Secundarios A Partir de Cultivo in VitroSofía JaraNoch keine Bewertungen
- Evaluacion Neuropsicologica, Examen Abreviado de Funciones SuperioresDokument13 SeitenEvaluacion Neuropsicologica, Examen Abreviado de Funciones Superiorescarlos miguel mendoza mallmaNoch keine Bewertungen
- Triptico Vela EcologicaDokument3 SeitenTriptico Vela EcologicaHilmer Luna Victoria Cabrera67% (3)
- Clase de Tercer Grado de Kathy StoneDokument2 SeitenClase de Tercer Grado de Kathy StoneHERMES LUCIANONoch keine Bewertungen
- UNIDAD 7 Actividades SucesionesDokument8 SeitenUNIDAD 7 Actividades SucesionesElba LazoNoch keine Bewertungen
- Ficha 2 - Segundo Año - Fiesta de Todos Los SantosDokument4 SeitenFicha 2 - Segundo Año - Fiesta de Todos Los SantosNelly OrmeñoNoch keine Bewertungen
- Eval 3 FGL-144 (IND-GRP)Dokument9 SeitenEval 3 FGL-144 (IND-GRP)Sebastián R. DuránNoch keine Bewertungen
- BαDokument2 SeitenBαJohannyr7Noch keine Bewertungen