Das könnte Ihnen auch gefallen
- Structural Health MonitoringVon EverandStructural Health MonitoringDaniel BalageasNoch keine Bewertungen
- Electric Motor Asset ManagementDokument12 SeitenElectric Motor Asset ManagementmelanitisNoch keine Bewertungen
- Interturn Short-Circuit Detector For Turbine-Generator Rotor WindingsDokument6 SeitenInterturn Short-Circuit Detector For Turbine-Generator Rotor WindingsEng Bagaragaza Romuald100% (1)
- ABB - General Purpose Motors Cast Iron - GB 092003Dokument49 SeitenABB - General Purpose Motors Cast Iron - GB 092003ivanjaviergutierrezoNoch keine Bewertungen
- IEEE 841: Motor VibrationDokument6 SeitenIEEE 841: Motor VibrationMahadi HasanNoch keine Bewertungen
- Calculation of Cogging TorqueDokument4 SeitenCalculation of Cogging TorqueMehdi SepehriNoch keine Bewertungen
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987Von EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNoch keine Bewertungen
- Current Signature AnalysisDokument2 SeitenCurrent Signature AnalysisbejomindNoch keine Bewertungen
- End Winding Vibration Hydro GeneratorDokument5 SeitenEnd Winding Vibration Hydro Generatorpatel chandramaniNoch keine Bewertungen
- CM3152 en SKF Idler Sound MonitorDokument4 SeitenCM3152 en SKF Idler Sound MonitorLuisSilvaNoch keine Bewertungen
- Stator Winding Fault Diagnosis in Three-PhaseDokument7 SeitenStator Winding Fault Diagnosis in Three-PhaseitcmiguelNoch keine Bewertungen
- Motor WindingsDokument12 SeitenMotor WindingsAbiodun IloriNoch keine Bewertungen
- Vibrations in A Francis Turbine A Case StudyDokument4 SeitenVibrations in A Francis Turbine A Case Studybukit_guestNoch keine Bewertungen
- 2009 - Todorov, Dobrev, Massouh - Analysis of Torsional Oscillation of The Drive Train in Horizontal-Axis Wind TurbineDokument7 Seiten2009 - Todorov, Dobrev, Massouh - Analysis of Torsional Oscillation of The Drive Train in Horizontal-Axis Wind TurbineLivrosScrNoch keine Bewertungen
- Bearing Current in VFD Fed MotorDokument24 SeitenBearing Current in VFD Fed Motormarn-in2501Noch keine Bewertungen
- 2 - Slow Speed Vibration Signal AnalysisDokument9 Seiten2 - Slow Speed Vibration Signal AnalysisSasi NimmakayalaNoch keine Bewertungen
- Vibration Monitoring For Fault Motors Diagnosis PDFDokument8 SeitenVibration Monitoring For Fault Motors Diagnosis PDFuuur35100% (1)
- DWDM Unit-5Dokument52 SeitenDWDM Unit-5Arun kumar SomaNoch keine Bewertungen
- Analysis of Fault Conditions in Permanent-Magnet In-Wheel MotorsDokument81 SeitenAnalysis of Fault Conditions in Permanent-Magnet In-Wheel MotorsSyed Qaseem AliNoch keine Bewertungen
- Subsynchronous Resonance Analysis: Types OF SSR InteractionDokument4 SeitenSubsynchronous Resonance Analysis: Types OF SSR InteractionBhavik PrajapatiNoch keine Bewertungen
- Artesis Condition MonitoringDokument33 SeitenArtesis Condition MonitoringNovri ArfanNoch keine Bewertungen
- Motor Current SignatureDokument5 SeitenMotor Current Signaturel1f3b00kNoch keine Bewertungen
- ISO 10816 6 1995 en PreviewDokument5 SeitenISO 10816 6 1995 en Previewblacx_rzkyNoch keine Bewertungen
- Design and Development of Machine Fault Simulator (MFS) For Fault DiagnosisDokument8 SeitenDesign and Development of Machine Fault Simulator (MFS) For Fault DiagnosisAnonymous pKuPK3zUNoch keine Bewertungen
- Modeling and Simulation of Permanent Magnet Synchronous Motor Drive SystemDokument106 SeitenModeling and Simulation of Permanent Magnet Synchronous Motor Drive SystemSlimane SouagNoch keine Bewertungen
- GearboxDokument6 SeitenGearboxedhy_03Noch keine Bewertungen
- Peakvue Case History 2Dokument9 SeitenPeakvue Case History 2ben_ramatlaNoch keine Bewertungen
- T19101 118Dokument18 SeitenT19101 118Chintan Raval100% (1)
- Analysis of Fan BladeDokument80 SeitenAnalysis of Fan BladeShripad PachputeNoch keine Bewertungen
- Mechanical Systems and Signal Processing: El Houssin El Bouchikhi, Vincent Choqueuse, Mohamed BenbouzidDokument18 SeitenMechanical Systems and Signal Processing: El Houssin El Bouchikhi, Vincent Choqueuse, Mohamed BenbouzidHumberto MerizaldeNoch keine Bewertungen
- Unbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsDokument2 SeitenUnbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsbasilecoqNoch keine Bewertungen
- Electromagnetic Force Couplingin - ANSYS PDFDokument48 SeitenElectromagnetic Force Couplingin - ANSYS PDFrahulbqaNoch keine Bewertungen
- Tutorial 4Dokument3 SeitenTutorial 4snoozermanNoch keine Bewertungen
- AC Motor Analysis (SKF)Dokument2 SeitenAC Motor Analysis (SKF)gpramuhandokoNoch keine Bewertungen
- Vibration Analysis Rolling Element BearingDokument20 SeitenVibration Analysis Rolling Element BearingmilaNoch keine Bewertungen
- Rolling Element Bearings Vibration AnalysisDokument10 SeitenRolling Element Bearings Vibration AnalysisSiva Kulanji100% (1)
- Motors:: The Past Is PresentDokument6 SeitenMotors:: The Past Is Presenteko bagus sunaryoNoch keine Bewertungen
- MEC322 Chapter 7 - TORQUE & POWER MEASUREMENTDokument19 SeitenMEC322 Chapter 7 - TORQUE & POWER MEASUREMENTAiman ArhamNoch keine Bewertungen
- Phase Analysis: Making Vibration Analysis Easier: SearchDokument4 SeitenPhase Analysis: Making Vibration Analysis Easier: Searchdillipsh123Noch keine Bewertungen
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDokument3 SeitenStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsNoch keine Bewertungen
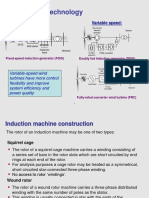
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDokument13 SeitenIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNoch keine Bewertungen
- Ch3 Balancing of Rigid - Flexible - Linked PDFDokument119 SeitenCh3 Balancing of Rigid - Flexible - Linked PDFAlexis CordovaNoch keine Bewertungen
- DfigDokument26 SeitenDfig1balamanianNoch keine Bewertungen
- Temperature Effects On DC Motor Performance 1Dokument10 SeitenTemperature Effects On DC Motor Performance 1BabuNoch keine Bewertungen
- Unit 3 SRMDokument66 SeitenUnit 3 SRMDr SriNoch keine Bewertungen
- ch10Dokument44 Seitench10PGPNoch keine Bewertungen
- Wound Rotor Motor TestingDokument5 SeitenWound Rotor Motor Testingbige1911Noch keine Bewertungen
- Vibrosystm Inc. Montreal, Canada: ©vibrosystm 2009. All Rights ReservedDokument143 SeitenVibrosystm Inc. Montreal, Canada: ©vibrosystm 2009. All Rights ReservedJavier CasteloNoch keine Bewertungen
- Induction MotorDokument39 SeitenInduction MotorSaneer M SaliNoch keine Bewertungen
- Development of An Online Diagnostic System Software For GGSSTPP Power Station RoparDokument18 SeitenDevelopment of An Online Diagnostic System Software For GGSSTPP Power Station RoparH100% (1)
- VVVF DrivesDokument16 SeitenVVVF DrivesIsradani MjNoch keine Bewertungen
- Theory of Machines - I: Question Bank (Numericals) Velocity and Acceleration Analysis of Mechanisms: Graphical MethodsDokument18 SeitenTheory of Machines - I: Question Bank (Numericals) Velocity and Acceleration Analysis of Mechanisms: Graphical Methodsvijaykumar327Noch keine Bewertungen
- TN 7 VibxpertDokument1 SeiteTN 7 VibxpertBahtiar YudhistiraNoch keine Bewertungen
- Tavner PeterDokument303 SeitenTavner PeterManigandanNoch keine Bewertungen
- Determining The Efficiency of Induction Machines, Converters and SoftstartersDokument8 SeitenDetermining The Efficiency of Induction Machines, Converters and Softstarterssadeq03Noch keine Bewertungen
- Belt Conveyor Drive Gearbox Problem Caused by Unpaired Gears-A Case StudyDokument11 SeitenBelt Conveyor Drive Gearbox Problem Caused by Unpaired Gears-A Case StudyJohn RobinsonNoch keine Bewertungen
- The First Handheld Sound Camera For Everyone: Product DataDokument2 SeitenThe First Handheld Sound Camera For Everyone: Product Datamalini72Noch keine Bewertungen
- Electric Vehicle Battery Management Algorithm Development-2016Dokument12 SeitenElectric Vehicle Battery Management Algorithm Development-2016malini72Noch keine Bewertungen
- A Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode ComponentsDokument11 SeitenA Novel Open-Circuit Fault Detection and Location For Open-End Winding PMSM Based On Differential-Mode Componentsmalini72Noch keine Bewertungen
- Laboratory Experiment 4 EE348L Spring 2005Dokument19 SeitenLaboratory Experiment 4 EE348L Spring 2005malini72Noch keine Bewertungen
- Two-Terminal Device: Peter Mathys ECEN 1400Dokument3 SeitenTwo-Terminal Device: Peter Mathys ECEN 1400malini72Noch keine Bewertungen
- Nonisolated High Gain DC-DC Converter For DC MicrogridsDokument8 SeitenNonisolated High Gain DC-DC Converter For DC Microgridsmalini72Noch keine Bewertungen
- Electronics1 Laboratory Manual PDFDokument61 SeitenElectronics1 Laboratory Manual PDFmalini72Noch keine Bewertungen
- Lecture 8A Unit Commitment Part 1Dokument25 SeitenLecture 8A Unit Commitment Part 1malini72Noch keine Bewertungen
- Energyauditofhigginslabs PDFDokument144 SeitenEnergyauditofhigginslabs PDFmalini72Noch keine Bewertungen
- Energy Saving in Labs: Even Basic Things Make A Difference..Dokument1 SeiteEnergy Saving in Labs: Even Basic Things Make A Difference..malini72Noch keine Bewertungen
- Automatic Generation Control Using Artificial Neural Networks - HarkiratDokument47 SeitenAutomatic Generation Control Using Artificial Neural Networks - Harkiratmalini72Noch keine Bewertungen
- Lecture8 PDFDokument20 SeitenLecture8 PDFmalini72Noch keine Bewertungen
- HB PolelineDokument99 SeitenHB PolelineCharlee100% (1)
- BIA108S Assessment2 PaperB v2Dokument7 SeitenBIA108S Assessment2 PaperB v2IsulaNoch keine Bewertungen
- Failure Analysis of A Motorcycle Brake DiscDokument13 SeitenFailure Analysis of A Motorcycle Brake DiscashwaniNoch keine Bewertungen
- Iso 17635 2016 en PDFDokument8 SeitenIso 17635 2016 en PDFUfuk ÇimenNoch keine Bewertungen
- Account Acceptance NoticeDokument1 SeiteAccount Acceptance NoticeOSBALDO DAMIAN GOMEZ VILLELANoch keine Bewertungen
- Objective: The Student Will Be Able ToDokument18 SeitenObjective: The Student Will Be Able ToJojit LEDESMANoch keine Bewertungen
- Statement NOV2021 660307552-1Dokument8 SeitenStatement NOV2021 660307552-1Kumari AnshuNoch keine Bewertungen
- Supervised Online ExamsDokument12 SeitenSupervised Online ExamsDinukaDeshanNoch keine Bewertungen
- PRC Instalation GuideDokument30 SeitenPRC Instalation GuideJahir FrutosNoch keine Bewertungen
- Boeing Fire AERO - 2011 - Q2 - Article3Dokument10 SeitenBoeing Fire AERO - 2011 - Q2 - Article3Braulio GomesNoch keine Bewertungen
- Gbi Project - Sonic Tower OfficeDokument35 SeitenGbi Project - Sonic Tower OfficeHazrul AimanNoch keine Bewertungen
- Corel Draw x7 Serial Number and Activation Code ListDokument5 SeitenCorel Draw x7 Serial Number and Activation Code ListJumia Showbox50% (4)
- S.No. Name of The Agency Contact Details: M/s M.P. PrintersDokument3 SeitenS.No. Name of The Agency Contact Details: M/s M.P. PrintersVIKKAS AGARWALNoch keine Bewertungen
- Microcare Single Phase Grid Tied LimiterDokument5 SeitenMicrocare Single Phase Grid Tied Limiterfopoku2k2Noch keine Bewertungen
- FinalRevisedChapter1 4ForIAAS (RAMIREZ)Dokument113 SeitenFinalRevisedChapter1 4ForIAAS (RAMIREZ)jhona dobladaNoch keine Bewertungen
- CoolGen-Training IDokument40 SeitenCoolGen-Training Iapi-1997553275% (4)
- OTM DM Data Management Guide Release18Dokument108 SeitenOTM DM Data Management Guide Release18Alf ColNoch keine Bewertungen
- Presentation - State of The System and Winter Outlook - 26 April 2026Dokument20 SeitenPresentation - State of The System and Winter Outlook - 26 April 2026victoriaNoch keine Bewertungen
- BI Assi - TaskDokument27 SeitenBI Assi - TaskShaku MakuNoch keine Bewertungen
- 7278-C of - (I S MBA - December2014: L1i'&'ji.3i, Illi Iil"lll?ilhe Stratesc Mana6ement ProcessDokument4 Seiten7278-C of - (I S MBA - December2014: L1i'&'ji.3i, Illi Iil"lll?ilhe Stratesc Mana6ement ProcessTrilok IndiNoch keine Bewertungen
- TXV Training DeckDokument32 SeitenTXV Training DeckJak JoniNoch keine Bewertungen
- CV-01-C Manual-Flipbook PDFDokument84 SeitenCV-01-C Manual-Flipbook PDFIzeddin Hussein IbrahimNoch keine Bewertungen
- A Practical Guide Using LLMs ChatGPT and BeyondDokument24 SeitenA Practical Guide Using LLMs ChatGPT and Beyondwz497345846Noch keine Bewertungen
- Speaker JBLCtrl24C ManualDokument19 SeitenSpeaker JBLCtrl24C ManualalexmilarNoch keine Bewertungen
- Project On Impact of Work From HomeDokument15 SeitenProject On Impact of Work From Homeroshini KNoch keine Bewertungen
- A318 - Ata 06 - Dimentions & AreasDokument22 SeitenA318 - Ata 06 - Dimentions & Areassuper_jaiz100% (1)
- Lab 1.2.5 Verifying RIP v2 Configuration: ObjectiveDokument7 SeitenLab 1.2.5 Verifying RIP v2 Configuration: ObjectiveHà TrầnNoch keine Bewertungen
- Speed Control of Three-Phase Induction Motor Using Sinusoidal Pulse Width ModulationDokument37 SeitenSpeed Control of Three-Phase Induction Motor Using Sinusoidal Pulse Width ModulationRavi KumarNoch keine Bewertungen
- Delco 39MT Sheet 5 23Dokument2 SeitenDelco 39MT Sheet 5 23Milorad ZelenovicNoch keine Bewertungen
- 03 IA - AC3007 - E01 NetNumen U31 Maintenance Management 45PDokument45 Seiten03 IA - AC3007 - E01 NetNumen U31 Maintenance Management 45PhammadNoch keine Bewertungen
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceVon EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNoch keine Bewertungen
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Von EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Noch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- A Mind at Play: How Claude Shannon Invented the Information AgeVon EverandA Mind at Play: How Claude Shannon Invented the Information AgeBewertung: 4 von 5 Sternen4/5 (53)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Power System Control and ProtectionVon EverandPower System Control and ProtectionB. Don RussellBewertung: 4 von 5 Sternen4/5 (11)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Von EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Bewertung: 4 von 5 Sternen4/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Digital Transformation: Survive and Thrive in an Era of Mass ExtinctionVon EverandDigital Transformation: Survive and Thrive in an Era of Mass ExtinctionBewertung: 4.5 von 5 Sternen4.5/5 (9)
- Schaum's Outline of Basic Electricity, Second EditionVon EverandSchaum's Outline of Basic Electricity, Second EditionBewertung: 5 von 5 Sternen5/5 (14)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsVon EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNoch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4 von 5 Sternen4/5 (331)
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Build Your Own Electronics WorkshopVon EverandBuild Your Own Electronics WorkshopBewertung: 3.5 von 5 Sternen3.5/5 (3)
- DIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesVon EverandDIY Drones for the Evil Genius: Design, Build, and Customize Your Own DronesBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignVon EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNoch keine Bewertungen
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldVon EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldBewertung: 4 von 5 Sternen4/5 (87)