Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Woodward 2301A 9905 9907 Series Technical ManualDokument52 SeitenWoodward 2301A 9905 9907 Series Technical Manualtimipl2100% (5)
- Motor Protection Selection TablesDokument1 SeiteMotor Protection Selection TablesCharlie MartinezNoch keine Bewertungen
- Robo TX Training Lab enDokument20 SeitenRobo TX Training Lab enm_scribd_20100% (1)
- Saddle Finisher q2 q4 GTC GCDDokument20 SeitenSaddle Finisher q2 q4 GTC GCDutilscNoch keine Bewertungen
- Modelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaDokument6 SeitenModelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaIDESNoch keine Bewertungen
- Indicating/Recording System Presentation: A318/A319/A320/A321 General Familiarization Course Indicating/Recording SystemsDokument36 SeitenIndicating/Recording System Presentation: A318/A319/A320/A321 General Familiarization Course Indicating/Recording SystemsvvNoch keine Bewertungen
- Speech Quality and MOSDokument27 SeitenSpeech Quality and MOSraghav_Sareen33% (3)
- Kuka YouBot Technical Specs PDFDokument4 SeitenKuka YouBot Technical Specs PDFWilliam GuarientiNoch keine Bewertungen
- Translating Orcad Layout Designs Using The Cadence Orcad and Allegro PCB Editors Rev A PDFDokument12 SeitenTranslating Orcad Layout Designs Using The Cadence Orcad and Allegro PCB Editors Rev A PDFgem1144aaNoch keine Bewertungen
- UEMK3313 Chemical Process Control and InstrumentationDokument4 SeitenUEMK3313 Chemical Process Control and InstrumentationRama KrishnaNoch keine Bewertungen
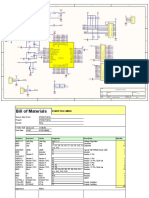
- MINI STM32 Schematic DiagramDokument2 SeitenMINI STM32 Schematic DiagramNoveri Dwi Hardyanto100% (1)
- Large Horizontal Machining Center: HM 1000 HM 1250 HM 1250WDokument20 SeitenLarge Horizontal Machining Center: HM 1000 HM 1250 HM 1250WRAJIV GandhiNoch keine Bewertungen
- DP9127V DPDokument11 SeitenDP9127V DPGustavo AlonsoNoch keine Bewertungen
- 1734-In056 - EN - Digital Output 8PTS - 1734 - OB8E Versionc PDFDokument22 Seiten1734-In056 - EN - Digital Output 8PTS - 1734 - OB8E Versionc PDFThanh BaronNoch keine Bewertungen
- PCAAD6 ManualDokument105 SeitenPCAAD6 ManualIván IvanovNoch keine Bewertungen
- Topic: Photoelectric Effect: Noble International SchoolDokument22 SeitenTopic: Photoelectric Effect: Noble International SchoolAnmol SinghalNoch keine Bewertungen
- Huawei ManualDokument42 SeitenHuawei ManualAntonio MenoyoNoch keine Bewertungen
- Manoj Updated CVDokument5 SeitenManoj Updated CVArun TiwariNoch keine Bewertungen
- Innovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsDokument225 SeitenInnovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsNazi JoonNoch keine Bewertungen
- Digital Sprite 2 DatasheetDokument2 SeitenDigital Sprite 2 DatasheetAndres F CalleNoch keine Bewertungen
- Introduction To Bond GraphsDokument8 SeitenIntroduction To Bond GraphsamiritehNoch keine Bewertungen
- Speedy 400 Manual enDokument61 SeitenSpeedy 400 Manual enWagner MenezesNoch keine Bewertungen
- Release Notes AccuNestDokument58 SeitenRelease Notes AccuNestDora BA50% (2)
- Solar Panel BP3125Dokument2 SeitenSolar Panel BP3125acuario_86ch@hotmail.comNoch keine Bewertungen
- Antenna Training System PDFDokument2 SeitenAntenna Training System PDFMerlin Gilbert Raj0% (1)
- Škoda Superb An 2017 #2.0TDI DSG #Tva Deductibila #GARANTIE #COLUMBUS Bucuresti Sectorul 1 - OLXDokument7 SeitenŠkoda Superb An 2017 #2.0TDI DSG #Tva Deductibila #GARANTIE #COLUMBUS Bucuresti Sectorul 1 - OLXViorel AvramescuNoch keine Bewertungen
- 2SC3987 NPN Planar Silicon Darlington TransistorDokument5 Seiten2SC3987 NPN Planar Silicon Darlington Transistoradda chariNoch keine Bewertungen
- 2005 RD 1 Questions tcm18-190744Dokument12 Seiten2005 RD 1 Questions tcm18-190744DeepMukherjeeNoch keine Bewertungen
- Thông Số Cài Đặt VFD CTK3Dokument84 SeitenThông Số Cài Đặt VFD CTK3Nguyen Hai DangNoch keine Bewertungen
- Vs-Vsk.230..Pbf Series: Vishay SemiconductorsDokument9 SeitenVs-Vsk.230..Pbf Series: Vishay SemiconductorsrenidwilNoch keine Bewertungen