Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Erasure Coding in Windows Azure Storage: Microsoft CorporationDokument12 SeitenErasure Coding in Windows Azure Storage: Microsoft CorporationAlan HartogNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Iterative Quantization: A Procrustean Approach To Learning Binary CodesDokument8 SeitenIterative Quantization: A Procrustean Approach To Learning Binary CodesAlan HartogNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Who Did What? The Roles of R Package Authors and How To Refer To ThemDokument6 SeitenWho Did What? The Roles of R Package Authors and How To Refer To ThemAlan HartogNoch keine Bewertungen
- Locality-Constrained Linear Coding For Image Classification: (Jyang29, Huang) @ifp - Uiuc.eduDokument8 SeitenLocality-Constrained Linear Coding For Image Classification: (Jyang29, Huang) @ifp - Uiuc.eduAlan HartogNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Measuring Coding Intensity in The Medicare Advantage ProgramDokument15 SeitenMeasuring Coding Intensity in The Medicare Advantage ProgramAlan HartogNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Neural Correlations, Population Coding and Computation: ReviewsDokument9 SeitenNeural Correlations, Population Coding and Computation: ReviewsAlan HartogNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Adaptive 360-Degree Video Streaming Using Layered Video CodingDokument2 SeitenAdaptive 360-Degree Video Streaming Using Layered Video CodingAlan HartogNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Strength of Social Coding Collaboration On GithubDokument6 SeitenThe Strength of Social Coding Collaboration On GithubAlan HartogNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- A Neural Implementation of Bayesian Inference Based On Predictive CodingDokument29 SeitenA Neural Implementation of Bayesian Inference Based On Predictive CodingAlan HartogNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Towards An Empirically Grounded Predictive Coding Account of Action UnderstandingDokument3 SeitenTowards An Empirically Grounded Predictive Coding Account of Action UnderstandingAlan HartogNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Challenges and Opportunities in Coding The Commons: Problems, Procedures, and Potential Solutions in Large-N Comparative Case StudiesDokument27 SeitenChallenges and Opportunities in Coding The Commons: Problems, Procedures, and Potential Solutions in Large-N Comparative Case StudiesAlan HartogNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Crowd-Sourced Text Analysis: Reproducible and Agile Production of Political DataDokument19 SeitenCrowd-Sourced Text Analysis: Reproducible and Agile Production of Political DataAlan HartogNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Foodways of The Urban PoorDokument10 SeitenFoodways of The Urban PoorAlan HartogNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- 4 Computer Aided Part ProgrammingDokument42 Seiten4 Computer Aided Part ProgrammingShanmukha priyaNoch keine Bewertungen
- Solar EnergyDokument30 SeitenSolar EnergyRushikesh RasalNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- C+source Code On +scienific CalculatorDokument22 SeitenC+source Code On +scienific CalculatorBittu76% (29)
- Graphics and Visual ComputingDokument16 SeitenGraphics and Visual ComputingTopher HayagNoch keine Bewertungen
- Chapter 6 and 7 - Procedure and FunctionDokument71 SeitenChapter 6 and 7 - Procedure and FunctionMafa OktaviaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- DBMS ProjectDokument28 SeitenDBMS ProjectNingamma BiradarNoch keine Bewertungen
- Practical File IPDokument27 SeitenPractical File IPtanulakhwal09Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- KDDDokument2 SeitenKDDnagendraoraappsNoch keine Bewertungen
- Micro Motion 4200 2-Wire Transmitter: CloseDokument9 SeitenMicro Motion 4200 2-Wire Transmitter: ClosekEWQ 865kNoch keine Bewertungen
- Katalog Części Bobcat 320C From 517811001 To 51789999 PartsDokument345 SeitenKatalog Części Bobcat 320C From 517811001 To 51789999 PartsHubert TojaNoch keine Bewertungen
- Boot AnimationDokument27 SeitenBoot AnimationAbhishek100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Price Forecasting & Anomaly Detection For Agricultural Commodities in IndiaDokument13 SeitenPrice Forecasting & Anomaly Detection For Agricultural Commodities in IndiaAction ReplayNoch keine Bewertungen
- 181 PDFDokument116 Seiten181 PDFcalciumblessing100% (2)
- DD 1 2 Practice Ryder CookDokument3 SeitenDD 1 2 Practice Ryder CookJessica IreneNoch keine Bewertungen
- Oracle Process ExecutionDokument552 SeitenOracle Process ExecutionVineethNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Understanding Security Capability of Information System1Dokument6 SeitenUnderstanding Security Capability of Information System1upadhyay kulbhushanNoch keine Bewertungen
- CAD CAM and CAE Course OutlineDokument3 SeitenCAD CAM and CAE Course Outlinedejenem398Noch keine Bewertungen
- Analisis Siklus Produksi Pada CoffeshopDokument14 SeitenAnalisis Siklus Produksi Pada CoffeshopAmara PrabasariNoch keine Bewertungen
- R.B. Pandey & Co.: Dealer & Distributors of National & Internationals Newspapers/Magazines/Journals)Dokument10 SeitenR.B. Pandey & Co.: Dealer & Distributors of National & Internationals Newspapers/Magazines/Journals)rannvijay pandeyNoch keine Bewertungen
- Select USA 2021 VirtualDokument15 SeitenSelect USA 2021 VirtualGaurav TripathiNoch keine Bewertungen
- P121.pdf (En US)Dokument142 SeitenP121.pdf (En US)Planeador MantenimientoNoch keine Bewertungen
- TI - How - To - Check - Off-headingOff-course-alarm-1st-Rev3 - 2Dokument4 SeitenTI - How - To - Check - Off-headingOff-course-alarm-1st-Rev3 - 2tengizNoch keine Bewertungen
- Designing Effective Powerpoint Presentations: Adopted From: Victor Chen Erau - V.Chen@ErauDokument49 SeitenDesigning Effective Powerpoint Presentations: Adopted From: Victor Chen Erau - V.Chen@ErauChara etangNoch keine Bewertungen
- The Evolving Role of The Chief Growth OfficerDokument8 SeitenThe Evolving Role of The Chief Growth OfficerhelloNoch keine Bewertungen
- API Mnemonic Operands Function Controllers: Es/Ex/Ss Sa/Sx/Sc Eh/SvDokument2 SeitenAPI Mnemonic Operands Function Controllers: Es/Ex/Ss Sa/Sx/Sc Eh/SvChristenes AlvesNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Dbms-5-Carol - Advanced Data ModelingDokument45 SeitenDbms-5-Carol - Advanced Data ModelingADE FIKRY MUSTOFANoch keine Bewertungen
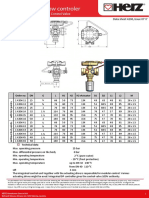
- HERZ-Motorised Flow Controler: Pressure Independant Balancing Control ValveDokument10 SeitenHERZ-Motorised Flow Controler: Pressure Independant Balancing Control ValveMahmoud NmiesNoch keine Bewertungen
- Workshop and Spare Parts Manual IQ MK 3 Range Actuators Module 1E Wormshaft Maintenance Kit All Mechanical SizesDokument1 SeiteWorkshop and Spare Parts Manual IQ MK 3 Range Actuators Module 1E Wormshaft Maintenance Kit All Mechanical SizesfernandoNoch keine Bewertungen
- Rm0421 Spc58xnx 32bit Power Architecture Microcontroller For Automotive Asild Applications StmicroelectronicsDokument4.101 SeitenRm0421 Spc58xnx 32bit Power Architecture Microcontroller For Automotive Asild Applications StmicroelectronicsAlan TorreblancaNoch keine Bewertungen
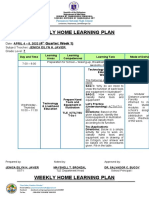
- Weekly Home Learning Plan: (4 Quarter: Week 1)Dokument8 SeitenWeekly Home Learning Plan: (4 Quarter: Week 1)JenicaEilynNoch keine Bewertungen
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)