Das könnte Ihnen auch gefallen
- Design and Operation of Human Locomotion SystemsVon EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNoch keine Bewertungen
- 360 Rotation of "Kinematic Walker Mechanism": Project Reference No.: 40S - Be - 1669Dokument4 Seiten360 Rotation of "Kinematic Walker Mechanism": Project Reference No.: 40S - Be - 1669ibrahimNoch keine Bewertungen
- Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesVon EverandAutonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesNoch keine Bewertungen
- Minor ProjectDokument23 SeitenMinor ProjectDeepak Kumar SinghNoch keine Bewertungen
- Synopsis: 1. Name of Institute: 2. Name of CourseDokument4 SeitenSynopsis: 1. Name of Institute: 2. Name of CourseAnonymous ZtJmIqmfaNoch keine Bewertungen
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaVon EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNoch keine Bewertungen
- Design and Synthesis of Eight-Legged Spider RobotDokument11 SeitenDesign and Synthesis of Eight-Legged Spider RobotIJRASETPublicationsNoch keine Bewertungen
- Ballari Institute of Technology & Management: Fabrication of Kinematic WalkerDokument21 SeitenBallari Institute of Technology & Management: Fabrication of Kinematic Walkerpavanchowdary PcNoch keine Bewertungen
- Walking MechanismDokument13 SeitenWalking Mechanismgaurav pachakawadeNoch keine Bewertungen
- Transport Box Machanism Investigatory Project (Chapter 1-3)Dokument23 SeitenTransport Box Machanism Investigatory Project (Chapter 1-3)Joanne Emille SanchoNoch keine Bewertungen
- Referencia 4Dokument7 SeitenReferencia 4Paula Catalina Guevara RiosNoch keine Bewertungen
- Design and Fabrication of Stair Case ClimbingDokument16 SeitenDesign and Fabrication of Stair Case Climbinggullapally animeshNoch keine Bewertungen
- 1st Stage Report On Hill Climbing Robot by Klanns MechanismDokument23 Seiten1st Stage Report On Hill Climbing Robot by Klanns MechanismEDUMECH SOLUTIONNoch keine Bewertungen
- Mechanical SpiderDokument4 SeitenMechanical SpiderR Bala SNoch keine Bewertungen
- Omni Wheels Robot For Effective Surveillance and Transportation PurposeDokument8 SeitenOmni Wheels Robot For Effective Surveillance and Transportation PurposeIJRASETPublicationsNoch keine Bewertungen
- Rockerbogie Mechanism Blackbook DataDokument42 SeitenRockerbogie Mechanism Blackbook Dataharshal kaduNoch keine Bewertungen
- 28451-Article Text-44163-1-10-20200708Dokument12 Seiten28451-Article Text-44163-1-10-20200708Manmeeth NNoch keine Bewertungen
- Main PaperDokument23 SeitenMain PaperPrakash ShendeNoch keine Bewertungen
- Jian Huang 2010Dokument9 SeitenJian Huang 2010std xiaoliangNoch keine Bewertungen
- Control of A Stair Climbing Wheelchair: International Journal of Robotics and Automation (IJRA)Dokument11 SeitenControl of A Stair Climbing Wheelchair: International Journal of Robotics and Automation (IJRA)Prateek AggarwalNoch keine Bewertungen
- 2 67 1640070534 2ijmperdfeb202202Dokument14 Seiten2 67 1640070534 2ijmperdfeb202202TJPRC PublicationsNoch keine Bewertungen
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDokument4 SeitenDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamreNoch keine Bewertungen
- Six Leg RobotDokument13 SeitenSix Leg Robotramesh2184Noch keine Bewertungen
- Design and Analysis of Multipurpose Relief VehicleDokument13 SeitenDesign and Analysis of Multipurpose Relief VehicleIJRASETPublicationsNoch keine Bewertungen
- Report - Self Balancing BicycleDokument18 SeitenReport - Self Balancing BicycleAniket PaithaneNoch keine Bewertungen
- Micromachines 13 01404 v2Dokument20 SeitenMicromachines 13 01404 v2technologie collegeNoch keine Bewertungen
- Shri Ramswaroop Memorial University: SynopsisDokument8 SeitenShri Ramswaroop Memorial University: SynopsisAbhishek MukherjeeNoch keine Bewertungen
- Finallatexreport 111Dokument26 SeitenFinallatexreport 111SACHIN DESHPANDENoch keine Bewertungen
- Iarjset-Ncdmete 13 PDFDokument5 SeitenIarjset-Ncdmete 13 PDFDeepak sutar100% (1)
- Foot Controlled Steering System-4702 PDFDokument4 SeitenFoot Controlled Steering System-4702 PDFSuresh sajjanNoch keine Bewertungen
- Design, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Dokument15 SeitenDesign, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Tejas PrakashNoch keine Bewertungen
- Design & Fabrication of Eight Legged Walking MachineDokument9 SeitenDesign & Fabrication of Eight Legged Walking Machinecharan prabhaNoch keine Bewertungen
- Jansen'S Linkage: by Pavan SrinivasDokument14 SeitenJansen'S Linkage: by Pavan SrinivasNELLORE PAVAN SRINIVAS SINGH NIT APNoch keine Bewertungen
- InTech-Omnidirectional Mobile Robot Design and ImplementationDokument18 SeitenInTech-Omnidirectional Mobile Robot Design and ImplementationSenthil KumarNoch keine Bewertungen
- Design and Analysis of Lower Control Arm of Suspension SystemDokument9 SeitenDesign and Analysis of Lower Control Arm of Suspension SystemDavid Emanuel Gómez VidalNoch keine Bewertungen
- Design and Fabrication of Wheel Chair Using Rocker Bogie MechanismDokument4 SeitenDesign and Fabrication of Wheel Chair Using Rocker Bogie MechanismEditor IJTSRDNoch keine Bewertungen
- Machines 10 00632 v2Dokument17 SeitenMachines 10 00632 v2Woodrow FoxNoch keine Bewertungen
- Voice Controlled Biped Walking Robot For Industrial ApplicationsDokument15 SeitenVoice Controlled Biped Walking Robot For Industrial ApplicationsNarendar Singh DNoch keine Bewertungen
- A Novel Robotic Meshworm With Segment-Bending Anchoring For ColonosDokument7 SeitenA Novel Robotic Meshworm With Segment-Bending Anchoring For ColonosNguyen SyNoch keine Bewertungen
- Dynamic of Two Wheeled RobotDokument35 SeitenDynamic of Two Wheeled RobotMartino Ojwok AjangnayNoch keine Bewertungen
- Applied Sciences: Special Feature On Bio-Inspired RoboticsDokument7 SeitenApplied Sciences: Special Feature On Bio-Inspired RoboticsJHON LEWIS LORA CHINCHIANoch keine Bewertungen
- Design and Development of Segway Human Transporter: Manish S. Lade Shubhank C. Jaunjal V. D. DhopteDokument3 SeitenDesign and Development of Segway Human Transporter: Manish S. Lade Shubhank C. Jaunjal V. D. DhopteSaransh JainNoch keine Bewertungen
- Synthesis of A Watt II Six-Bar Linkage in The Design of A Hand Rehab RobotDokument13 SeitenSynthesis of A Watt II Six-Bar Linkage in The Design of A Hand Rehab RobotJuan MNoch keine Bewertungen
- Design of Rocker Bogie MechanismDokument5 SeitenDesign of Rocker Bogie MechanismVinoth Rouge RockersNoch keine Bewertungen
- Stair Climbing Robot Using Star-Wheel MethodologyDokument3 SeitenStair Climbing Robot Using Star-Wheel MethodologyYeshwanth SuryaNoch keine Bewertungen
- The Klann Linkage Is A PlanarDokument17 SeitenThe Klann Linkage Is A PlanarslitantNoch keine Bewertungen
- Design of A Passive Gait-Based Ankle-Foot Exoskeleton With Self-Adaptive CapabilityDokument11 SeitenDesign of A Passive Gait-Based Ankle-Foot Exoskeleton With Self-Adaptive CapabilityRomán Bonilla SánchezNoch keine Bewertungen
- An Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismDokument8 SeitenAn Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismIJRASETPublicationsNoch keine Bewertungen
- Report 17pg.Dokument14 SeitenReport 17pg.AchuthanNoch keine Bewertungen
- Design Process and Development of A Prototype Electric WheelchairDokument7 SeitenDesign Process and Development of A Prototype Electric WheelchairKANAK SHARMANoch keine Bewertungen
- Adaptive Suspension System For Mars RoverDokument6 SeitenAdaptive Suspension System For Mars RoverSamin ZarifNoch keine Bewertungen
- Six Leg Kinematic Moving MachineDokument12 SeitenSix Leg Kinematic Moving MachineShubham Bonde100% (1)
- Crawling Gait Realization of The Mini-Modular ClimDokument10 SeitenCrawling Gait Realization of The Mini-Modular ClimAttila NagyNoch keine Bewertungen
- Lever Action Tricycle: Project by ProjectguideDokument34 SeitenLever Action Tricycle: Project by Projectguidesoubhadra nag100% (1)
- Efficient and Versatile Locomotion With Highly Compliant LegsDokument3 SeitenEfficient and Versatile Locomotion With Highly Compliant LegsNisrina Safira SariNoch keine Bewertungen
- Main Content PDFDokument27 SeitenMain Content PDFYash BuddhadevNoch keine Bewertungen
- A New Controlling Parameter in Design of Above Knee ProsthesisDokument8 SeitenA New Controlling Parameter in Design of Above Knee ProsthesismohsinslatchNoch keine Bewertungen
- Niu 2015Dokument7 SeitenNiu 2015Suchitra SharmaNoch keine Bewertungen
- Materials Today: Proceedings: T. Deepa, S. Angalaeswari, D. Subbulekshmi, S. Krithiga, S. Sujeeth, Raja KathiravanDokument5 SeitenMaterials Today: Proceedings: T. Deepa, S. Angalaeswari, D. Subbulekshmi, S. Krithiga, S. Sujeeth, Raja KathiravanReshab SahooNoch keine Bewertungen
- Ariel CorporationDokument1 SeiteAriel CorporationAnwar SadatNoch keine Bewertungen
- CatalogoDokument10 SeitenCatalogopedroNoch keine Bewertungen
- Brochure Ec380d Ec480d t2 t3 en 30 20030338 DDokument32 SeitenBrochure Ec380d Ec480d t2 t3 en 30 20030338 DJose Martin Rodriguez YarlequeNoch keine Bewertungen
- Ansi B16 Valve Face To Face Dimensions: Ball Valves Ball ValvesDokument3 SeitenAnsi B16 Valve Face To Face Dimensions: Ball Valves Ball ValvesRAVIKIRAN BARDENoch keine Bewertungen
- Proper Engine Room VentilationDokument2 SeitenProper Engine Room VentilationAsok AyyappanNoch keine Bewertungen
- An Introduction To Pumping Equipment: Principle, Operation & MaintenanceDokument18 SeitenAn Introduction To Pumping Equipment: Principle, Operation & Maintenancegowrisankar32Noch keine Bewertungen
- Ducati - 749S Parts 2005Dokument125 SeitenDucati - 749S Parts 2005italianhobgmail.comNoch keine Bewertungen
- Lecture 8 Turbocharger Modeling PDFDokument35 SeitenLecture 8 Turbocharger Modeling PDFNugrahaNoch keine Bewertungen
- 2011 GN125 PDFDokument74 Seiten2011 GN125 PDFWalter SaguiNoch keine Bewertungen
- SR285R W10 2020 172953Dokument2 SeitenSR285R W10 2020 172953TigerNoch keine Bewertungen
- Astra - HD9 - Spec SheetDokument2 SeitenAstra - HD9 - Spec SheetRanyeri Moreira de SousaNoch keine Bewertungen
- Alwasy Step Ahead in TechnologyDokument6 SeitenAlwasy Step Ahead in TechnologyDxFx100% (1)
- HAP E-Help: Modeling Induction Beams in HAP v4.8Dokument8 SeitenHAP E-Help: Modeling Induction Beams in HAP v4.8codefinderNoch keine Bewertungen
- Pump Technology Screwpumps l2 Series enDokument11 SeitenPump Technology Screwpumps l2 Series enCamiloHernándezNoch keine Bewertungen
- Qleous Blumei Fadrigon - Final Examination (E&m)Dokument1 SeiteQleous Blumei Fadrigon - Final Examination (E&m)Jersey Ann Reign A. GabinNoch keine Bewertungen
- GR 80 CONFIGURATION DIAGRAMDokument20 SeitenGR 80 CONFIGURATION DIAGRAMAffan fNoch keine Bewertungen
- Parameter: Home Product About ContactDokument2 SeitenParameter: Home Product About Contactgustavo caicedoNoch keine Bewertungen
- Wichita ClutchDokument8 SeitenWichita Clutchayman akrabNoch keine Bewertungen
- 37, 41, 42MT SSL Solenoids PDFDokument4 Seiten37, 41, 42MT SSL Solenoids PDFjuanNoch keine Bewertungen
- Manual Subaru LegacyDokument5 SeitenManual Subaru LegacyJesus Daniel VasconcelosNoch keine Bewertungen
- Spare Parts Gatalogue Getman Parte 1Dokument310 SeitenSpare Parts Gatalogue Getman Parte 1EFREN SANCHEZ ROBLESNoch keine Bewertungen
- Gorbel Freestanding I Beam Jib BrochureDokument28 SeitenGorbel Freestanding I Beam Jib BrochureMarceloPolicastroNoch keine Bewertungen
- Central Hydraulics IncDokument30 SeitenCentral Hydraulics Incmetin metinNoch keine Bewertungen
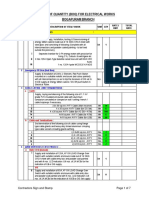
- Bill of Quantity (Boq) For Electrical Works Bogapuram BranchDokument7 SeitenBill of Quantity (Boq) For Electrical Works Bogapuram BranchAye Myat KhaingNoch keine Bewertungen
- Totaline 2020 Product CatalogueDokument72 SeitenTotaline 2020 Product CatalogueJAY ROD AWITNoch keine Bewertungen
- SpicerDokument3 SeitenSpicerBrayan Mejia AlvarezNoch keine Bewertungen
- Mini GMV5 Technical SpecificationsDokument1 SeiteMini GMV5 Technical Specificationskostis57Noch keine Bewertungen
- Orchid Business Group Djibouti Sarl Site Purchase Request Quantity Request in PCS Store Reference Quantity PurchaseDokument2 SeitenOrchid Business Group Djibouti Sarl Site Purchase Request Quantity Request in PCS Store Reference Quantity PurchaseSadik BhaiNoch keine Bewertungen
- f2013-013 CASE N SBDokument11 Seitenf2013-013 CASE N SBVictor PinedoNoch keine Bewertungen
- Cyber War: The Next Threat to National Security and What to Do About ItVon EverandCyber War: The Next Threat to National Security and What to Do About ItBewertung: 3.5 von 5 Sternen3.5/5 (66)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- AI Superpowers: China, Silicon Valley, and the New World OrderVon EverandAI Superpowers: China, Silicon Valley, and the New World OrderBewertung: 4.5 von 5 Sternen4.5/5 (399)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideVon EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideBewertung: 5 von 5 Sternen5/5 (2)
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyVon EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyBewertung: 4 von 5 Sternen4/5 (51)
- System Error: Where Big Tech Went Wrong and How We Can RebootVon EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (229)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyVon EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNoch keine Bewertungen
- Mini Farming: Self-Sufficiency on 1/4 AcreVon EverandMini Farming: Self-Sufficiency on 1/4 AcreBewertung: 4 von 5 Sternen4/5 (76)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceVon EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (5)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)
- The Innovator's Solution: Creating and Sustaining Successful GrowthVon EverandThe Innovator's Solution: Creating and Sustaining Successful GrowthBewertung: 4 von 5 Sternen4/5 (118)
- The E-Myth Revisited: Why Most Small Businesses Don't Work andVon EverandThe E-Myth Revisited: Why Most Small Businesses Don't Work andBewertung: 4.5 von 5 Sternen4.5/5 (709)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumVon EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumBewertung: 3 von 5 Sternen3/5 (12)
- CISM Certified Information Security Manager Study GuideVon EverandCISM Certified Information Security Manager Study GuideNoch keine Bewertungen
- The Bitcoin Standard: The Decentralized Alternative to Central BankingVon EverandThe Bitcoin Standard: The Decentralized Alternative to Central BankingBewertung: 4.5 von 5 Sternen4.5/5 (41)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceVon EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNoch keine Bewertungen
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsVon EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsBewertung: 5 von 5 Sternen5/5 (2)