Das könnte Ihnen auch gefallen
- Microprocessor Architectures and Systems: RISC, CISC and DSPVon EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPBewertung: 4 von 5 Sternen4/5 (1)
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- I 2 C Motor ControllerDokument29 SeitenI 2 C Motor Controllerthanhsonvn90Noch keine Bewertungen
- 7 Capture Compare PWMDokument19 Seiten7 Capture Compare PWMcrazyllmonkeyNoch keine Bewertungen
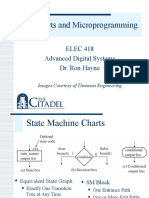
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDokument38 SeitenSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22Noch keine Bewertungen
- 2 Digit Token Display System ReportDokument9 Seiten2 Digit Token Display System Reportdeardestiny100% (1)
- Lab 07-Analysis of CCP Module For Capture, Compare and PWM: AnswerDokument2 SeitenLab 07-Analysis of CCP Module For Capture, Compare and PWM: AnswerNida AliNoch keine Bewertungen
- PIC18F4550 Timer Capture (CCP) mode ExplainedDokument16 SeitenPIC18F4550 Timer Capture (CCP) mode Explainedbaseer khanNoch keine Bewertungen
- 04 SpeedControlDokument5 Seiten04 SpeedControlAngel ChicchonNoch keine Bewertungen
- Power Point PresentationDokument17 SeitenPower Point PresentationVNoch keine Bewertungen
- Part 1Dokument31 SeitenPart 1SarthakGuptaNoch keine Bewertungen
- State Graphs For Control NetworksDokument37 SeitenState Graphs For Control Networksashudiya100% (1)
- RPM CounterDokument4 SeitenRPM CountermailtoakhilsNoch keine Bewertungen
- ATmega Interrupts Explained/TITLEDokument17 SeitenATmega Interrupts Explained/TITLEJarfoNoch keine Bewertungen
- Experiment #6 Input / Output DesignDokument11 SeitenExperiment #6 Input / Output DesignFelipe DiasNoch keine Bewertungen
- PIC 16F877 CCP Modules for PWM, Capture & Compare ModesDokument8 SeitenPIC 16F877 CCP Modules for PWM, Capture & Compare ModesPrabhu Parames100% (1)
- HT66F018 PTM IR Carrier Function Application Example: D/N HA0 326EDokument10 SeitenHT66F018 PTM IR Carrier Function Application Example: D/N HA0 326EHenrique Cesar Pellegrino MasettoNoch keine Bewertungen
- Avr ArchitectureDokument29 SeitenAvr ArchitectureOdoch HerbertNoch keine Bewertungen
- Industrial Automation Using MicrocontrollerDokument43 SeitenIndustrial Automation Using MicrocontrollerBiswajit SarkarNoch keine Bewertungen
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDokument8 SeitenAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNoch keine Bewertungen
- Timer 2Dokument29 SeitenTimer 2Cesar Matos100% (2)
- PIC18C CAN Routines in C' AN738Dokument32 SeitenPIC18C CAN Routines in C' AN738don krtekNoch keine Bewertungen
- AN594 - Using The CCP Module(s)Dokument25 SeitenAN594 - Using The CCP Module(s)Guillermo Hernandez100% (3)
- GSM Based Home AutomationDokument80 SeitenGSM Based Home AutomationShashi Kant SainiNoch keine Bewertungen
- 3 CCP ModuleDokument20 Seiten3 CCP ModuleMalik Adil FarooqNoch keine Bewertungen
- RPM Counter Using Micro ControllerDokument16 SeitenRPM Counter Using Micro ControllerNitesh Kumar Sen100% (1)
- 8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCDokument9 Seiten8 MPLAB ICD & PIC 16F877 Tutorial: CY CY OSC OSCrobotbusterNoch keine Bewertungen
- أختبار الدكتور جهاد مشروعDokument7 Seitenأختبار الدكتور جهاد مشروعA.M.B M.B.M.ENoch keine Bewertungen
- Timers of ATmega328PDokument26 SeitenTimers of ATmega328PZaryab Khalil SiddiqueNoch keine Bewertungen
- Interface Clavier PicDokument27 SeitenInterface Clavier Picblaiso2020Noch keine Bewertungen
- 3 Program CodeDokument15 Seiten3 Program Codergkusumba100% (1)
- ATmega8 SHT71 Temperature Humidity and Dew Point ExampleDokument9 SeitenATmega8 SHT71 Temperature Humidity and Dew Point Examplehieuhuech1Noch keine Bewertungen
- Microcontrollers LabDokument19 SeitenMicrocontrollers LabAMARNATHNAIDU77Noch keine Bewertungen
- Using The MSSP Module To Interface I2CDokument16 SeitenUsing The MSSP Module To Interface I2Csoft4gsmNoch keine Bewertungen
- PIC16F87XA: Register 8-1: Ccp1Con Register/Ccp2Con Register (Address 17H/1Dh)Dokument5 SeitenPIC16F87XA: Register 8-1: Ccp1Con Register/Ccp2Con Register (Address 17H/1Dh)vitor valeNoch keine Bewertungen
- Virtual Axis Monitoring MotionDokument4 SeitenVirtual Axis Monitoring MotionbhageshlNoch keine Bewertungen
- 8155 Is An Integrated RamDokument22 Seiten8155 Is An Integrated RamVipan SharmaNoch keine Bewertungen
- EDM18B010 - Expt4-Embedded System Design PracticeDokument9 SeitenEDM18B010 - Expt4-Embedded System Design PracticeCHIRAG C M CHIRAG C MNoch keine Bewertungen
- Econder MicrochipDokument12 SeitenEconder MicrochipSandra MarkivNoch keine Bewertungen
- Appkit:: Using The Ds1620 Digital Thermometer/ThermostatDokument26 SeitenAppkit:: Using The Ds1620 Digital Thermometer/ThermostatMUHAMMAD SISWANTORONoch keine Bewertungen
- PIC18F4550 Timer Compare Mode - PIC ControllersDokument7 SeitenPIC18F4550 Timer Compare Mode - PIC ControllersKrishanu Modak50% (2)
- On-Chip PeripheralsDokument73 SeitenOn-Chip PeripheralsR R DeshmukhNoch keine Bewertungen
- Miroprogram Control UnitDokument21 SeitenMiroprogram Control UnitSameer SalamNoch keine Bewertungen
- Ericsson RNC Iu PS Link Creation ProceduDokument9 SeitenEricsson RNC Iu PS Link Creation ProceduhamidboulahiaNoch keine Bewertungen
- Description: 1k DQ CLK RST GND VDD T (Hi) 1Dokument26 SeitenDescription: 1k DQ CLK RST GND VDD T (Hi) 1lgrome73Noch keine Bewertungen
- PIC PWM LabDokument9 SeitenPIC PWM LabGhulam E Muhammad Usman100% (1)
- PIC Simple Signal GeneratorDokument5 SeitenPIC Simple Signal GeneratorDumindu JayawardeneNoch keine Bewertungen
- 4 CCP ModuleDokument35 Seiten4 CCP ModuleM.i. RehmanNoch keine Bewertungen
- LCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Dokument16 SeitenLCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Vishnu Vijay SNoch keine Bewertungen
- F 818Dokument9 SeitenF 818Eric YangNoch keine Bewertungen
- Adc PWMDokument26 SeitenAdc PWMShivaram Reddy ManchireddyNoch keine Bewertungen
- PICBASIC PROGRAM FOR SERVO CONTROL USING TIMER INTERRUPTDokument13 SeitenPICBASIC PROGRAM FOR SERVO CONTROL USING TIMER INTERRUPTleo2tvNoch keine Bewertungen
- Defense MechanismDokument27 SeitenDefense MechanismgkkishorekumarNoch keine Bewertungen
- Parallel Timer InterfaceDokument13 SeitenParallel Timer InterfaceRiham AbdallahNoch keine Bewertungen
- Pic 16 F 628Dokument20 SeitenPic 16 F 628Merényi Oszkár100% (1)
- Setup and Use The AVR® TimersDokument16 SeitenSetup and Use The AVR® Timersmike_helplineNoch keine Bewertungen
- HD 61202Dokument5 SeitenHD 61202kalangeNoch keine Bewertungen
- List Alarm EnshuDokument438 SeitenList Alarm EnshuWidya LalaNoch keine Bewertungen
- ResolverDokument8 SeitenResolverNishant KalbhorNoch keine Bewertungen
- CCP ModuleDokument11 SeitenCCP ModuleAltaaf Mulani100% (1)
- Allison TransmissionDokument74 SeitenAllison Transmissionanacer55100% (1)
- VBAProfessional Tips SecretsDokument175 SeitenVBAProfessional Tips Secretsanacer55Noch keine Bewertungen
- Data Sheet: Low-Power Smart Card CouplerDokument33 SeitenData Sheet: Low-Power Smart Card Coupleranacer55Noch keine Bewertungen
- HD44780Dokument60 SeitenHD44780nzltfNoch keine Bewertungen
- STEP 7 - Function Block Diagram For S7-300 and S7-400Dokument220 SeitenSTEP 7 - Function Block Diagram For S7-300 and S7-400ntrtfNoch keine Bewertungen
- LCD Display PinoutDokument4 SeitenLCD Display PinoutYoav GolanNoch keine Bewertungen
- cc5x 34Dokument118 Seitencc5x 34Pablo Andres Achá SerranoNoch keine Bewertungen
- Differences Between Function (FC) and Function Block (FB) in Siemens PLC-S7 ProgrammingDokument2 SeitenDifferences Between Function (FC) and Function Block (FB) in Siemens PLC-S7 Programminganacer55Noch keine Bewertungen
- XRHS385 MD: Instruction Manual For Portable CompressorsDokument32 SeitenXRHS385 MD: Instruction Manual For Portable Compressorsanacer55Noch keine Bewertungen
- Geexin B EnglishDokument34 SeitenGeexin B Englishanacer55Noch keine Bewertungen
- XRHS385 MD: Instruction Manual For Portable CompressorsDokument32 SeitenXRHS385 MD: Instruction Manual For Portable Compressorsanacer55Noch keine Bewertungen
- Smart Battery Data Accuracy Testing Guidelines: Revision 2.0Dokument23 SeitenSmart Battery Data Accuracy Testing Guidelines: Revision 2.0anacer55Noch keine Bewertungen
- G2MaRob1 PDFDokument1 SeiteG2MaRob1 PDFanacer55Noch keine Bewertungen
- c500 AismDokument118 Seitenc500 AismJosé AdelinoNoch keine Bewertungen
- cc5x 34Dokument118 Seitencc5x 34Pablo Andres Achá SerranoNoch keine Bewertungen
- Smart Battery Data Accuracy Testing Guidelines: Revision 2.0Dokument23 SeitenSmart Battery Data Accuracy Testing Guidelines: Revision 2.0anacer55Noch keine Bewertungen
- Smart Battery Data Accuracy Testing Guidelines: Revision 2.0Dokument23 SeitenSmart Battery Data Accuracy Testing Guidelines: Revision 2.0anacer55Noch keine Bewertungen
- MC34064 DDokument11 SeitenMC34064 DdsouzahansenNoch keine Bewertungen
- HEF4020BDokument13 SeitenHEF4020Banacer55Noch keine Bewertungen
- 001-65209 AN65209 Getting Started With FX2LPDokument27 Seiten001-65209 AN65209 Getting Started With FX2LPanacer55Noch keine Bewertungen
- NPN Epitaxial Base Darlington Power Transistor DatasheetDokument3 SeitenNPN Epitaxial Base Darlington Power Transistor Datasheetanacer55Noch keine Bewertungen
- Ampeg - SVT 3 Pro PDFDokument14 SeitenAmpeg - SVT 3 Pro PDFanacer55Noch keine Bewertungen
- Arduino DUE Microcontroller BoardDokument1 SeiteArduino DUE Microcontroller BoardRodrigo Enrique Azocar CarcassonNoch keine Bewertungen
- The Past, Present and Future of Batteries and MicrobatteriesDokument8 SeitenThe Past, Present and Future of Batteries and Microbatteriesanacer55Noch keine Bewertungen
- Xrhs385 MDDokument32 SeitenXrhs385 MDanacer55Noch keine Bewertungen
- Notebook Combo-Debug-Card (VIP Version) User GuideDokument4 SeitenNotebook Combo-Debug-Card (VIP Version) User Guideanacer55Noch keine Bewertungen
- Laminar Flow Hood System DesignDokument64 SeitenLaminar Flow Hood System Designanacer55Noch keine Bewertungen
- Lh7a404 NDokument75 SeitenLh7a404 Nanacer55Noch keine Bewertungen
- ST8675 5in1 Mini PCIe Laptop Debug Test Card User GuideDokument4 SeitenST8675 5in1 Mini PCIe Laptop Debug Test Card User Guideanacer55Noch keine Bewertungen
- Computer Systems Organization-Hardware-v3Dokument39 SeitenComputer Systems Organization-Hardware-v3patrick rollodaNoch keine Bewertungen
- IBM MDM Installation GuideDokument214 SeitenIBM MDM Installation GuideAdam HowardNoch keine Bewertungen
- Lenovo t430 NZM4H-7 r7.54Dokument97 SeitenLenovo t430 NZM4H-7 r7.54norberto100% (1)
- The Ultimate Guide To Cloud Computing PDFDokument100 SeitenThe Ultimate Guide To Cloud Computing PDFJorge Andres Zapata ForeroNoch keine Bewertungen
- Oracle PL/SQL exception typesDokument17 SeitenOracle PL/SQL exception typesT Pulla ReddyNoch keine Bewertungen
- University of Notre Dame CSE/EE 40462/60462 VLSI Circuit Design Lecture 11 1st October 2013Dokument44 SeitenUniversity of Notre Dame CSE/EE 40462/60462 VLSI Circuit Design Lecture 11 1st October 2013Bhyrapaneni LakshmanNoch keine Bewertungen
- TapRooT Course InformationDokument2 SeitenTapRooT Course InformationNIJESHNoch keine Bewertungen
- ECC500 (PowerCube) User Manual (V300R001C01 - 03)Dokument137 SeitenECC500 (PowerCube) User Manual (V300R001C01 - 03)Nguyen Minh Thanh50% (2)
- Asm654 Test Revision Muhammad HanafiDokument4 SeitenAsm654 Test Revision Muhammad Hanafimuhd fadhliNoch keine Bewertungen
- Estimate guidelines summaryDokument14 SeitenEstimate guidelines summaryRamelfebea Montedelobenia100% (1)
- Adobe Systems - Case Analysis - Sec ADokument3 SeitenAdobe Systems - Case Analysis - Sec Ac_bhanNoch keine Bewertungen
- Schedule Orders and Reserve Supply in Oracle Order ManagementDokument2 SeitenSchedule Orders and Reserve Supply in Oracle Order Managementkrishanu1013Noch keine Bewertungen
- Jenkins Cheat Sheet PDFDokument1 SeiteJenkins Cheat Sheet PDFsiva_relaxNoch keine Bewertungen
- Kubernetes For EveryoneDokument34 SeitenKubernetes For EveryoneApurv PrakashNoch keine Bewertungen
- 70-743 Upgrading Your Skills To Mcsa Windows Server 2016 v1 by Fiber PDFDokument366 Seiten70-743 Upgrading Your Skills To Mcsa Windows Server 2016 v1 by Fiber PDFAsad MahmoodNoch keine Bewertungen
- DCS A-10C GUI Manual ENDokument216 SeitenDCS A-10C GUI Manual ENRavindran KodakkattilNoch keine Bewertungen
- ch02 NtducDokument29 Seitench02 NtducKensleyTsangNoch keine Bewertungen
- SYLLABUS-IN-applied Business ToolsDokument10 SeitenSYLLABUS-IN-applied Business ToolsCristy Lansangan MejiaNoch keine Bewertungen
- DWM Unit2Dokument65 SeitenDWM Unit2Hansica MadurkarNoch keine Bewertungen
- 1.0 Get The License Key: Application NoteDokument11 Seiten1.0 Get The License Key: Application Notechristian84Noch keine Bewertungen
- Implementing Insertion Sort AlgorithmDokument11 SeitenImplementing Insertion Sort AlgorithmBejo SukarjoNoch keine Bewertungen
- Low Cost Computerized Digital IC TesterDokument4 SeitenLow Cost Computerized Digital IC Testereditor_ijtelNoch keine Bewertungen
- Using Python Libraries and ModulesDokument8 SeitenUsing Python Libraries and ModulesSahil AhmadNoch keine Bewertungen
- Face Recognition Based Attendance System: Presentation OnDokument18 SeitenFace Recognition Based Attendance System: Presentation OnAmarjeet guptaNoch keine Bewertungen
- Partnering With Cisco For SMB EngineersDokument107 SeitenPartnering With Cisco For SMB EngineersRamon CantuNoch keine Bewertungen
- Lenovo Case Facts - 1Dokument6 SeitenLenovo Case Facts - 1MUDIT YAGNIK 23Noch keine Bewertungen
- Biochimistry A25 Biosysteme User ManualDokument41 SeitenBiochimistry A25 Biosysteme User ManualAnonymous TKVVyi100% (2)
- MIS Important-QuestionsDokument3 SeitenMIS Important-QuestionsAmy AungNoch keine Bewertungen
- Bradburn Et Al v. North Central Regional Library District - Document No. 41Dokument25 SeitenBradburn Et Al v. North Central Regional Library District - Document No. 41Justia.comNoch keine Bewertungen
- ODI Uses Six Different Types of Knowledge ModulesDokument7 SeitenODI Uses Six Different Types of Knowledge ModulesReddy seelam manoharNoch keine Bewertungen