Das könnte Ihnen auch gefallen
- Elliott Wave Timing Beyond Ordinary Fibonacci MethodsVon EverandElliott Wave Timing Beyond Ordinary Fibonacci MethodsBewertung: 4 von 5 Sternen4/5 (21)
- Time Series with Python: How to Implement Time Series Analysis and Forecasting Using PythonVon EverandTime Series with Python: How to Implement Time Series Analysis and Forecasting Using PythonBewertung: 3 von 5 Sternen3/5 (1)
- Applied Quantitative Research Methods Time Series: 5th March 2020Dokument29 SeitenApplied Quantitative Research Methods Time Series: 5th March 2020ElaineNoch keine Bewertungen
- Astm E1975 - 1 (En)Dokument17 SeitenAstm E1975 - 1 (En)Dinesh Sai100% (1)
- Physioex Ex 7 AnswersDokument5 SeitenPhysioex Ex 7 AnswersTin-tinNoch keine Bewertungen
- Time Series Data: y + X + - . .+ X + UDokument81 SeitenTime Series Data: y + X + - . .+ X + Uraja ahmedNoch keine Bewertungen
- Transforming Time SeriesDokument8 SeitenTransforming Time SeriesZenzen MiclatNoch keine Bewertungen
- Applied Quantitative Research Methods Time Series: 2nd March 2020Dokument30 SeitenApplied Quantitative Research Methods Time Series: 2nd March 2020ElaineNoch keine Bewertungen
- Lecture12 TS Index PDFDokument20 SeitenLecture12 TS Index PDFsnoozermanNoch keine Bewertungen
- AcceleratorDokument14 SeitenAcceleratorShivam TrivediNoch keine Bewertungen
- Understanding Time Series Analyisis 2021Dokument69 SeitenUnderstanding Time Series Analyisis 2021Agnes Nalutaaya100% (1)
- Lecture Note 1 - Introduction To Time SeriesDokument13 SeitenLecture Note 1 - Introduction To Time SeriesWilians SantosNoch keine Bewertungen
- "640K Ought To Be Enough For Anybody.": Hapter IME Eries OrecastingDokument3 Seiten"640K Ought To Be Enough For Anybody.": Hapter IME Eries OrecastingMichaella EnriquezNoch keine Bewertungen
- AcceleratorDokument14 SeitenAcceleratorJasjit BalNoch keine Bewertungen
- Phy Prac Solved - Iv PDFDokument90 SeitenPhy Prac Solved - Iv PDFJuma mnandiNoch keine Bewertungen
- Semmler 2005Dokument16 SeitenSemmler 2005Anonymous sGLwiwMA4Noch keine Bewertungen
- ##Some Known Facts About Financial DataDokument13 Seiten##Some Known Facts About Financial DataLooseNoch keine Bewertungen
- QM2019 HP 3Dokument32 SeitenQM2019 HP 3Florian PerussetNoch keine Bewertungen
- 1 ResSimCh1 PDFDokument59 Seiten1 ResSimCh1 PDFweldsv1Noch keine Bewertungen
- Decomposition and SmoothingDokument20 SeitenDecomposition and SmoothinglauraNoch keine Bewertungen
- Forelæsning 6 Forecasting-IDokument53 SeitenForelæsning 6 Forecasting-IBelal FaizNoch keine Bewertungen
- Lecture Note: Analysis of Financial Time SeriesDokument12 SeitenLecture Note: Analysis of Financial Time Seriestestuser132546Noch keine Bewertungen
- WWW - Ib.academy: Study GuideDokument116 SeitenWWW - Ib.academy: Study GuideTwenty NineteenNoch keine Bewertungen
- Actuarial Methods PDFDokument198 SeitenActuarial Methods PDFTana JoNoch keine Bewertungen
- FASE II - Tema 7Dokument27 SeitenFASE II - Tema 7Angela MelgarNoch keine Bewertungen
- Week 1Dokument75 SeitenWeek 1xinyichen121Noch keine Bewertungen
- Time Series Models and Forecasting and ForecastingDokument49 SeitenTime Series Models and Forecasting and ForecastingDominic AndohNoch keine Bewertungen
- Exponential Decay: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDokument8 SeitenExponential Decay: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNoch keine Bewertungen
- BCGZrbIgSUOhma2yIGlDWw BF C2 W4a Seasonal Dummy VariablesDokument19 SeitenBCGZrbIgSUOhma2yIGlDWw BF C2 W4a Seasonal Dummy VariablesManuel Alejandro Sanabria AmayaNoch keine Bewertungen
- Assignment 2 - Excel ExerciseDokument8 SeitenAssignment 2 - Excel ExerciseCarter A KellyNoch keine Bewertungen
- Cointegration Analysis and ECM: Spurious Regression PhenomenaDokument33 SeitenCointegration Analysis and ECM: Spurious Regression PhenomenaYogi Maxy AntonyNoch keine Bewertungen
- Solution To Campbell Lo Mackinlay PDFDokument71 SeitenSolution To Campbell Lo Mackinlay PDFstaimouk0% (1)
- Time SeriesDokument63 SeitenTime SeriesMegan SpitzerNoch keine Bewertungen
- Time SeriesDokument16 SeitenTime SeriesShil ShambharkarNoch keine Bewertungen
- Time Series Analysis: Applied Econometrics Prof. Dr. Simone MaxandDokument124 SeitenTime Series Analysis: Applied Econometrics Prof. Dr. Simone MaxandAmandaNoch keine Bewertungen
- Lecture Notes On Optimization TechniquesDokument140 SeitenLecture Notes On Optimization TechniquesUmer AzharNoch keine Bewertungen
- Time - Series & Seasonal AdjustmentDokument56 SeitenTime - Series & Seasonal AdjustmentAdil Bin KhalidNoch keine Bewertungen
- Physics in Context SC3105Dokument27 SeitenPhysics in Context SC3105Nik FakhiraNoch keine Bewertungen
- ch08 SupDokument17 Seitench08 SupSuresh ReddyNoch keine Bewertungen
- Chapter 8 Supplement: Work MeasurementDokument17 SeitenChapter 8 Supplement: Work MeasurementPalendra Kumar SahuNoch keine Bewertungen
- Monetary Theory AnalysisDokument109 SeitenMonetary Theory Analysismspandey2000Noch keine Bewertungen
- 1 The Solow ModelDokument11 Seiten1 The Solow ModelHaixiang ZhuNoch keine Bewertungen
- Bayesian Structural Time Series ModelsDokument100 SeitenBayesian Structural Time Series Modelsquantanglement100% (1)
- 3201 W1 & 2 - MRP Forecasting From TS 20100722Dokument37 Seiten3201 W1 & 2 - MRP Forecasting From TS 20100722Tony TangNoch keine Bewertungen
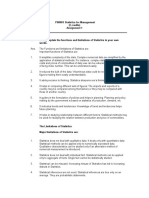
- PB0003 Statistics For Management (3 Credits) Assignment 1Dokument5 SeitenPB0003 Statistics For Management (3 Credits) Assignment 1juanda poNoch keine Bewertungen
- Learning Curves: Dr. Everette S. Gardner, JRDokument15 SeitenLearning Curves: Dr. Everette S. Gardner, JRdamanNoch keine Bewertungen
- Assignment3 Zhao ZihuiDokument8 SeitenAssignment3 Zhao Zihuizhaozhaozizizi2Noch keine Bewertungen
- Res Sim CH 1Dokument57 SeitenRes Sim CH 1MuhammadHafizBaharuddinNoch keine Bewertungen
- THE SOLOW MODEL (Ghulam Samad)Dokument19 SeitenTHE SOLOW MODEL (Ghulam Samad)tskokoNoch keine Bewertungen
- TS Chapter1Dokument8 SeitenTS Chapter1Shahrukh Abdur RehmanNoch keine Bewertungen
- Econometrics CH 3Dokument39 SeitenEconometrics CH 3Tsehay BirhanuNoch keine Bewertungen
- Exercise 5Dokument2 SeitenExercise 5ValentinNoch keine Bewertungen
- Analysis of Repairable SystemsDokument21 SeitenAnalysis of Repairable SystemsabhishekNoch keine Bewertungen
- Combinepdf 3Dokument22 SeitenCombinepdf 3AskIIT IanNoch keine Bewertungen
- Chapter 1 - Lecture SlidesDokument53 SeitenChapter 1 - Lecture SlidesJoel Tan Yi JieNoch keine Bewertungen
- General Physics 1 ADM Module 1 4 FINAL 2Dokument33 SeitenGeneral Physics 1 ADM Module 1 4 FINAL 2vladguimbal01Noch keine Bewertungen
- Solving DSGE Models Using DynareDokument11 SeitenSolving DSGE Models Using DynarerudiminNoch keine Bewertungen
- Solving DSGE Models Using DynareDokument11 SeitenSolving DSGE Models Using DynarerudiminNoch keine Bewertungen
- Handbook of Computational Fluid MechanicsVon EverandHandbook of Computational Fluid MechanicsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Modelling Stock Market Volatility: Bridging the Gap to Continuous TimeVon EverandModelling Stock Market Volatility: Bridging the Gap to Continuous TimeBewertung: 3.5 von 5 Sternen3.5/5 (1)
- Forex Wave Theory: A Technical Analysis for Spot and Futures Curency Traders: A Technical Analysis for Spot and Futures Curency TradersVon EverandForex Wave Theory: A Technical Analysis for Spot and Futures Curency Traders: A Technical Analysis for Spot and Futures Curency TradersNoch keine Bewertungen
- AQRM Exercise Lecture 2Dokument17 SeitenAQRM Exercise Lecture 2ElaineNoch keine Bewertungen
- AQRM Exercise Lecture 3Dokument17 SeitenAQRM Exercise Lecture 3ElaineNoch keine Bewertungen
- AQRM Exercise Lecture 4Dokument11 SeitenAQRM Exercise Lecture 4ElaineNoch keine Bewertungen
- AQRM Exercise Lecture 1Dokument16 SeitenAQRM Exercise Lecture 1ElaineNoch keine Bewertungen
- ETW2111 S2-07examDokument15 SeitenETW2111 S2-07examElaineNoch keine Bewertungen
- Exam of Refinery PDF 2Dokument20 SeitenExam of Refinery PDF 2ئارام ناصح محمد حسێن0% (1)
- Custard The DragonDokument4 SeitenCustard The DragonNilesh NagarNoch keine Bewertungen
- BR18S-7 Manual CracteristicasDokument10 SeitenBR18S-7 Manual Cracteristicasrendimax insumos agricolasNoch keine Bewertungen
- Module 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Dokument36 SeitenModule 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Kimberly Jean LautrizoNoch keine Bewertungen
- Single Nozzle Air-Jet LoomDokument7 SeitenSingle Nozzle Air-Jet LoomRakeahkumarDabkeyaNoch keine Bewertungen
- Transes - Male & Female GenitaliaDokument10 SeitenTranses - Male & Female GenitaliacamatoviancaNoch keine Bewertungen
- A554-15 Standard Specification For Welded Stainless Steel Mechanical TubingDokument8 SeitenA554-15 Standard Specification For Welded Stainless Steel Mechanical TubingChuthaNoch keine Bewertungen
- April262019 Airline Economic Analysis 2018-2019vfwebDokument62 SeitenApril262019 Airline Economic Analysis 2018-2019vfwebapi-548139140Noch keine Bewertungen
- LP 1st ObservationDokument6 SeitenLP 1st ObservationMichael AnoraNoch keine Bewertungen
- Baby Checklist: Room Furniture Baby Wear Baby BeddingDokument2 SeitenBaby Checklist: Room Furniture Baby Wear Baby BeddingLawrence ConananNoch keine Bewertungen
- Truss Design GuidDokument3 SeitenTruss Design GuidRafi HasanNoch keine Bewertungen
- What Is Kpag?: Table of ContentsDokument2 SeitenWhat Is Kpag?: Table of Contentsangelito bernalNoch keine Bewertungen
- CH 7. Pneumatic and HydroulicDokument20 SeitenCH 7. Pneumatic and HydroulicAbenezer Tasew100% (1)
- A World of Composite Technologies BrochureDokument15 SeitenA World of Composite Technologies Brochurethorsten_kasterNoch keine Bewertungen
- B.ing Wajib - XI IPA1-2Dokument3 SeitenB.ing Wajib - XI IPA1-2iwan fals NurjaniNoch keine Bewertungen
- Discussion 2 Module 2 - Paronda PDFDokument1 SeiteDiscussion 2 Module 2 - Paronda PDFAlvanna ParondaNoch keine Bewertungen
- HVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004Dokument4 SeitenHVT DS HAEFELY RIC 422 Reference Impulse Calibrator V2004leivajNoch keine Bewertungen
- Chapter 1 - Physical Properties of Liquid PDFDokument43 SeitenChapter 1 - Physical Properties of Liquid PDFrohit sharmaNoch keine Bewertungen
- Dividing Fractions : and What It MeansDokument22 SeitenDividing Fractions : and What It MeansFlors BorneaNoch keine Bewertungen
- IES318 Series: DIN-Rail or Wall Mounting 8-Port 100M Unmanaged Industrial Ethernet SwitchDokument5 SeitenIES318 Series: DIN-Rail or Wall Mounting 8-Port 100M Unmanaged Industrial Ethernet SwitchSỹ TháiNoch keine Bewertungen
- Modding For Ysflight - Scenery EditorDokument92 SeitenModding For Ysflight - Scenery Editordecaff_42Noch keine Bewertungen
- As You Face Life: Pray To God and Ask His GuidanceDokument11 SeitenAs You Face Life: Pray To God and Ask His GuidancesophiegarciaNoch keine Bewertungen
- Animal Cells PDFDokument4 SeitenAnimal Cells PDFFalah HabibNoch keine Bewertungen
- Thru Tubing Catalog PDFDokument43 SeitenThru Tubing Catalog PDFchubby_hippoNoch keine Bewertungen
- CO Q1 TLE EPAS 7 8 Module 4 Preparing Technical DrawingsDokument47 SeitenCO Q1 TLE EPAS 7 8 Module 4 Preparing Technical DrawingsNicky John Doroca Dela MercedNoch keine Bewertungen
- Snapping TurtleDokument1 SeiteSnapping Turtleapi-379174072Noch keine Bewertungen
- SRS Cheat CodesDokument9 SeitenSRS Cheat CodesnurhayatiNoch keine Bewertungen