Das könnte Ihnen auch gefallen
- Hot Works Safety TrainingDokument80 SeitenHot Works Safety TrainingJohn Paul Bañaria50% (2)
- H1 60 & 68 CC Closed Circuit Axial Piston Pumps: Parts ManualDokument80 SeitenH1 60 & 68 CC Closed Circuit Axial Piston Pumps: Parts Manualjoliveira_387024Noch keine Bewertungen
- Service Manual: Section 6 Troubleshooting and Repair WX210 - WX240Dokument22 SeitenService Manual: Section 6 Troubleshooting and Repair WX210 - WX240Andrey AndrienkoNoch keine Bewertungen
- PM102 QENR2010 Esquema HidraulicoDokument2 SeitenPM102 QENR2010 Esquema Hidraulicoroger100% (2)
- JCB Hand Held Hydraulic Equipment: Service ManualDokument51 SeitenJCB Hand Held Hydraulic Equipment: Service ManualEng-Mohammed SalemNoch keine Bewertungen
- LM Ap4802n InbDokument20 SeitenLM Ap4802n InbWalace LucasNoch keine Bewertungen
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGVon EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNoch keine Bewertungen
- ENG - C7 and C9 ACERTDokument59 SeitenENG - C7 and C9 ACERTBeniamin Kowoll100% (1)
- Husky 3275 Air-Operated Diaphragm Pump: Instructions - Parts ListDokument30 SeitenHusky 3275 Air-Operated Diaphragm Pump: Instructions - Parts ListDeividas BNoch keine Bewertungen
- Instrucciones Distribuidor SB12-LSDokument28 SeitenInstrucciones Distribuidor SB12-LSbenjamin100% (1)
- Service Information: New Clutch Actuator KBE2 (Clutch Actuation Unit)Dokument5 SeitenService Information: New Clutch Actuator KBE2 (Clutch Actuation Unit)Beniamin KowollNoch keine Bewertungen
- Ficha Tecnica - Bomba Hidraulica Sauer Danfoss PDFDokument220 SeitenFicha Tecnica - Bomba Hidraulica Sauer Danfoss PDFpokebalomanNoch keine Bewertungen
- MR 12MSX 5400701 GBDokument84 SeitenMR 12MSX 5400701 GBFarid RezigNoch keine Bewertungen
- Bomba Hidráulica (Ppal) Serie A.55 Serie H1P250 Parts Manual (H1P250R E8 C3 N D6 C G2 NN L40 K38 R L 24 PN NNN NNN)Dokument96 SeitenBomba Hidráulica (Ppal) Serie A.55 Serie H1P250 Parts Manual (H1P250R E8 C3 N D6 C G2 NN L40 K38 R L 24 PN NNN NNN)IngenieriaNoch keine Bewertungen
- Aa4v56 Series 1 Service Parts ListDokument36 SeitenAa4v56 Series 1 Service Parts Listhamza HamzaNoch keine Bewertungen
- AirValves 2013 PDFDokument268 SeitenAirValves 2013 PDFSergio Sebastian Ramirez GamiñoNoch keine Bewertungen
- Kesla Harvester Heads (Service)Dokument32 SeitenKesla Harvester Heads (Service)SP100% (1)
- TDV 100Dokument6 SeitenTDV 100林育豪Noch keine Bewertungen
- 25RH, 25RHS 12 2009 111431Dokument85 Seiten25RH, 25RHS 12 2009 111431Hector bustosNoch keine Bewertungen
- O&K Carraro AxlesDokument10 SeitenO&K Carraro AxlesMarek WyszatyckiNoch keine Bewertungen
- HD10 13 ElecDokument23 SeitenHD10 13 ElecDenNoch keine Bewertungen
- Zeagle Reg Service ManualDokument33 SeitenZeagle Reg Service ManualRafael DinnerNoch keine Bewertungen
- 762C PartsDokument126 Seiten762C Partsacostajorgeluis05Noch keine Bewertungen
- 8359 BDDokument97 Seiten8359 BDRadek Caver JohánekNoch keine Bewertungen
- HP HydraulicsDokument32 SeitenHP HydraulicsJesús Alberto100% (1)
- Operation Maintenance Spareparts: Hydraulic Remote Control For Grapple LoadersDokument27 SeitenOperation Maintenance Spareparts: Hydraulic Remote Control For Grapple LoadersАлексей100% (1)
- Esq.+E.+FPS+CCM CHI LWBDokument103 SeitenEsq.+E.+FPS+CCM CHI LWBVictor PinedoNoch keine Bewertungen
- RM80 ManualDokument589 SeitenRM80 ManualAndrej KapustjonokNoch keine Bewertungen
- Radial Piston Motor (Multi-Stroke) MCR10: RE 15207/07.10 1/16 Replaces: 02.98Dokument16 SeitenRadial Piston Motor (Multi-Stroke) MCR10: RE 15207/07.10 1/16 Replaces: 02.98juanchis650Noch keine Bewertungen
- Variable Parallel Pumps DPVP: Short DescriptionDokument4 SeitenVariable Parallel Pumps DPVP: Short DescriptionЕкатерина КалашниковаNoch keine Bewertungen
- en 20211110Dokument39 Seitenen 20211110chaky212100% (1)
- Contact InformationDokument447 SeitenContact Informationmilandilov100% (1)
- Brochure Dasa5Dokument16 SeitenBrochure Dasa5tystar_21100% (1)
- Waratah: 200-Series / 400-Series / Fl85 / TimberriteDokument28 SeitenWaratah: 200-Series / 400-Series / Fl85 / TimberriteNico AndersonNoch keine Bewertungen
- Load Sense and Pressure Compensator Control Adjustment For HPR-02 PumpDokument5 SeitenLoad Sense and Pressure Compensator Control Adjustment For HPR-02 Pumpsatria adiNoch keine Bewertungen
- Section EDokument110 SeitenSection Ebaracuss323iNoch keine Bewertungen
- Motomit IT Kesla Basic SettingsDokument3 SeitenMotomit IT Kesla Basic Settingsmichaud1979Noch keine Bewertungen
- Spare Parts List: Order No.: 09608261 Denomination: A4VG180HDMT1/32R-NSD02F021S-SDokument19 SeitenSpare Parts List: Order No.: 09608261 Denomination: A4VG180HDMT1/32R-NSD02F021S-SJoe Correa100% (2)
- UntitledDokument116 SeitenUntitledheiner duran100% (1)
- 30RH Ii (2017)Dokument62 Seiten30RH Ii (2017)Daniel AguirreNoch keine Bewertungen
- Compact Power Packs: Functional DescriptionDokument16 SeitenCompact Power Packs: Functional DescriptionRaúl FigueroaNoch keine Bewertungen
- Topcon System 5 2D Machine Control User ManualDokument172 SeitenTopcon System 5 2D Machine Control User ManualSofía FainaNoch keine Bewertungen
- Bomba de Pistones Rexroht en Español A8v0Dokument36 SeitenBomba de Pistones Rexroht en Español A8v0usuario29000100% (2)
- Transportador de Troncos Cat 564,574 (Ing)Dokument4 SeitenTransportador de Troncos Cat 564,574 (Ing)Carlos Alfredo Laura0% (1)
- Ms 35 Hydraulic Motors PoclainDokument36 SeitenMs 35 Hydraulic Motors PoclainANTON NEAGUNoch keine Bewertungen
- Vickers PVB MVB Piston PumpDokument29 SeitenVickers PVB MVB Piston Pumppablo cofreNoch keine Bewertungen
- Manual de Partes Ç 890.2Dokument523 SeitenManual de Partes Ç 890.2luis melloNoch keine Bewertungen
- Johnston 5000 Series Service Training InformationDokument63 SeitenJohnston 5000 Series Service Training InformationVygintas BalciusNoch keine Bewertungen
- HMV Data and SpecificationsDokument19 SeitenHMV Data and SpecificationsxxshNoch keine Bewertungen
- kx019 4 1 PDFDokument8 Seitenkx019 4 1 PDFFarNoch keine Bewertungen
- Re15209 03-95Dokument8 SeitenRe15209 03-95Kaushik GhoshNoch keine Bewertungen
- New Holland W110B TIER 3 Wheel Loader Service Repair ManualDokument21 SeitenNew Holland W110B TIER 3 Wheel Loader Service Repair ManualggjjjjotonesNoch keine Bewertungen
- Electric Operacion RENR3037!03!01 - ALLDokument60 SeitenElectric Operacion RENR3037!03!01 - ALLRaúl Alberto Zang100% (1)
- Black Bruin C5410110AADokument7 SeitenBlack Bruin C5410110AAРуденко Роман100% (1)
- Linde Service GuideDokument3 SeitenLinde Service GuideLuis PaezNoch keine Bewertungen
- Kesla 20RH Harvester Head (Operator)Dokument64 SeitenKesla 20RH Harvester Head (Operator)SP100% (1)
- Spareparts KESLA 28RH 30RH GB 2011 09 05Dokument110 SeitenSpareparts KESLA 28RH 30RH GB 2011 09 05michaud1979100% (2)
- SAT318 HarvesterHead SAT318T Harvester Head SAT322 Harvester Head Technical Training Information - UENR0356UENR0356 - SIS PDFDokument122 SeitenSAT318 HarvesterHead SAT318T Harvester Head SAT322 Harvester Head Technical Training Information - UENR0356UENR0356 - SIS PDFEDUARDO JAVIER VALENZUELANoch keine Bewertungen
- 202 Mecalac 12 MXT Wheeled Excavator CatalogueDokument3 Seiten202 Mecalac 12 MXT Wheeled Excavator CatalogueСергій XрестикNoch keine Bewertungen
- BW 219 DH 5Dokument2 SeitenBW 219 DH 5Hữu Dũng Nguyễn0% (1)
- SBC 610 SBC 610S: Ydraylikéw KroystikéwDokument7 SeitenSBC 610 SBC 610S: Ydraylikéw KroystikéwMi MoniNoch keine Bewertungen
- XS122PD MANUAL DE OPERAÇÃO - EnglishDokument44 SeitenXS122PD MANUAL DE OPERAÇÃO - EnglishAntonio MedeirosNoch keine Bewertungen
- Hydraulic System: Main Menu Click The Volvo-Logo in The Lower Right Corner To Return To This MenuDokument4 SeitenHydraulic System: Main Menu Click The Volvo-Logo in The Lower Right Corner To Return To This MenuCarlos Alberto Baptista100% (1)
- Trans Diagram Ml260Dokument2 SeitenTrans Diagram Ml260ferneyNoch keine Bewertungen
- Faster Engates HidraulicosDokument404 SeitenFaster Engates HidraulicosmecelberNoch keine Bewertungen
- Rotator Baltrotors GR16SDokument3 SeitenRotator Baltrotors GR16SAnonymous 80HAPYsoNoch keine Bewertungen
- 06 637Dokument29 Seiten06 637Eng-Mohammed SalemNoch keine Bewertungen
- Satco LTD: Satco 223 Setup & Testing ManualDokument41 SeitenSatco LTD: Satco 223 Setup & Testing ManualHeidi Cuevas VenegasNoch keine Bewertungen
- 506 IngDokument2 Seiten506 IngleomyroNoch keine Bewertungen
- Truck, Tractor and Bus ABS Wall Chart: Support Literature: For Service/Aftermarket OrdersDokument1 SeiteTruck, Tractor and Bus ABS Wall Chart: Support Literature: For Service/Aftermarket OrdersBeniamin KowollNoch keine Bewertungen
- Mccormick - Tractor OEM Part #Dokument8 SeitenMccormick - Tractor OEM Part #Beniamin KowollNoch keine Bewertungen
- 2006 02 14 Tractor-TowedEquipmentRoundtable PDFDokument84 Seiten2006 02 14 Tractor-TowedEquipmentRoundtable PDFBeniamin KowollNoch keine Bewertungen
- An Introduction To ISOBUS and Its Importance To You: The ISOBUS Buzz For More ISOBUS Information..Dokument2 SeitenAn Introduction To ISOBUS and Its Importance To You: The ISOBUS Buzz For More ISOBUS Information..Beniamin KowollNoch keine Bewertungen
- Front End - Replacing Tie-Rod Ends PDFDokument4 SeitenFront End - Replacing Tie-Rod Ends PDFBeniamin KowollNoch keine Bewertungen
- 4472 077 067 - 068 - 078 Aplb755Dokument34 Seiten4472 077 067 - 068 - 078 Aplb755Beniamin KowollNoch keine Bewertungen
- One Moment in Time: - Whitney HoustonDokument2 SeitenOne Moment in Time: - Whitney HoustonBeniamin KowollNoch keine Bewertungen
- Components Location, Engine Related Sensors: Service InformationDokument1 SeiteComponents Location, Engine Related Sensors: Service InformationBeniamin KowollNoch keine Bewertungen
- One Moment in Time: - Whitney HoustonDokument2 SeitenOne Moment in Time: - Whitney HoustonBeniamin KowollNoch keine Bewertungen
- Components Location, Cab Interior: Service InformationDokument2 SeitenComponents Location, Cab Interior: Service InformationBeniamin KowollNoch keine Bewertungen
- Relay Box, Specifications: Service InformationDokument1 SeiteRelay Box, Specifications: Service InformationBeniamin KowollNoch keine Bewertungen
- Engine Control: NoticeDokument2 SeitenEngine Control: NoticeBeniamin KowollNoch keine Bewertungen
- Engine Speed Control Switch, Description: Service InformationDokument2 SeitenEngine Speed Control Switch, Description: Service InformationBeniamin KowollNoch keine Bewertungen
- Connectors, Location: Service InformationDokument6 SeitenConnectors, Location: Service InformationBeniamin KowollNoch keine Bewertungen
- PDC-001 002 UserManual2014 Final (STD)Dokument60 SeitenPDC-001 002 UserManual2014 Final (STD)Consuelo Rubio De RuizNoch keine Bewertungen
- AR2012 Catalog Smaller SizeDokument60 SeitenAR2012 Catalog Smaller SizeKevin DodsonNoch keine Bewertungen
- Regulator Control Valves - Series 5000Dokument12 SeitenRegulator Control Valves - Series 5000Miriam bragaNoch keine Bewertungen
- Dräger Pas Airpack 1: ComponentsDokument5 SeitenDräger Pas Airpack 1: ComponentsParag ChandankhedeNoch keine Bewertungen
- Datex Ohmeda 7900 Anesthesia VentilatorDokument2 SeitenDatex Ohmeda 7900 Anesthesia VentilatorCesar MolanoNoch keine Bewertungen
- Laserstar Spec SheetDokument8 SeitenLaserstar Spec SheetEduardo EnriquezNoch keine Bewertungen
- 2FRM 6Dokument6 Seiten2FRM 6Romly MechNoch keine Bewertungen
- RedQFlexflo Model 80Dokument8 SeitenRedQFlexflo Model 80SOTEINSTRUMENTATION0% (1)
- MSA safetySCOPE - European Product Portfolio. Available From Coyle & Associates (WWW - Canda.ie)Dokument144 SeitenMSA safetySCOPE - European Product Portfolio. Available From Coyle & Associates (WWW - Canda.ie)Coyle & Associates100% (1)
- EE061 Pneumatic Controls PR InstDokument70 SeitenEE061 Pneumatic Controls PR InstSameera Kodikara33% (3)
- QPR20-0367T LSP Life Support PackageDokument11 SeitenQPR20-0367T LSP Life Support PackageJames LimNoch keine Bewertungen
- SMC - CatalogDokument32 SeitenSMC - CatalogNo HopeNoch keine Bewertungen
- Broil King Owners ManualDokument36 SeitenBroil King Owners ManualJohn RecyclerNoch keine Bewertungen
- 3.11.3 Hot Work GuidanceDokument31 Seiten3.11.3 Hot Work GuidanceAbdus SamadNoch keine Bewertungen
- Tiltable Nitrogen and Oxygen CartsDokument2 SeitenTiltable Nitrogen and Oxygen CartsAlejandro GómezNoch keine Bewertungen
- The NEW Company ProfileDokument26 SeitenThe NEW Company ProfilewisandhaNoch keine Bewertungen
- Parker COMOSO 0600P E Complete 3-28-2013 Valvair II SeriesDokument40 SeitenParker COMOSO 0600P E Complete 3-28-2013 Valvair II SeriesmohammedNoch keine Bewertungen
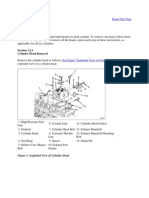
- 002 - Cylinder HeadDokument18 Seiten002 - Cylinder Headmax_simonsNoch keine Bewertungen
- Efs Brochure 11-2010Dokument36 SeitenEfs Brochure 11-2010Anonymous Wu6FDjbNoch keine Bewertungen
- 4 Water FloodDokument6 Seiten4 Water FloodEduardoWire100% (1)
- Manual de Servicio MCM801Dokument62 SeitenManual de Servicio MCM801jao100% (1)
- Ranarex Gas Gravitometer Model 388 Manual 1Dokument35 SeitenRanarex Gas Gravitometer Model 388 Manual 1Ramiro Niampira HortuaNoch keine Bewertungen
- Aircraft Air Conditioning & PressurisationDokument24 SeitenAircraft Air Conditioning & Pressurisationronasso7Noch keine Bewertungen