Das könnte Ihnen auch gefallen
- Intelligent Spy RobotDokument6 SeitenIntelligent Spy RobotPeter JoseNoch keine Bewertungen
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CVon EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CNoch keine Bewertungen
- Project Robo 1Dokument25 SeitenProject Robo 1wasifazimNoch keine Bewertungen
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byDokument26 SeitenWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleNoch keine Bewertungen
- 8051 Microcontroller Based Edge Avoiding RobotDokument14 Seiten8051 Microcontroller Based Edge Avoiding RobotJuthik BVNoch keine Bewertungen
- Human Detection Robot DetailsDokument6 SeitenHuman Detection Robot DetailschirayilrichardNoch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotVenkat Munnangi100% (1)
- An Overview of Spy RobotDokument23 SeitenAn Overview of Spy RobotNihaNoch keine Bewertungen
- Making of IR Sensor ModuleDokument18 SeitenMaking of IR Sensor ModuleGhigoarta Sergiu DanielNoch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotRohit sharmaNoch keine Bewertungen
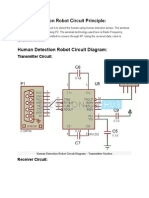
- Human Detection Robot Circuit PrincipleDokument4 SeitenHuman Detection Robot Circuit PrincipleAli KhanNoch keine Bewertungen
- Requirements Specification: Wireless RobotDokument7 SeitenRequirements Specification: Wireless RobotAnkur GoyalNoch keine Bewertungen
- Mobile Phone Controlled RobotDokument19 SeitenMobile Phone Controlled RobotNippu KumarNoch keine Bewertungen
- Wireless 4 Dof Robotic Arm Using Mega 2560-1Dokument11 SeitenWireless 4 Dof Robotic Arm Using Mega 2560-1Kamal HasanNoch keine Bewertungen
- Unmanned Robotic Ground Vehicle by Using ZIG-BEE and GPS: M.Tech - EMBEDDED SYSTEMS-KEC-11F41D5512Dokument85 SeitenUnmanned Robotic Ground Vehicle by Using ZIG-BEE and GPS: M.Tech - EMBEDDED SYSTEMS-KEC-11F41D5512Poorna DeviNoch keine Bewertungen
- Line Follower and Obstacle AvoidingDokument12 SeitenLine Follower and Obstacle AvoidingFaisal Nouman60% (5)
- Live Human Being Detection Wireless Remote Controlled RobotDokument59 SeitenLive Human Being Detection Wireless Remote Controlled RobotAnand Cool90% (10)
- GSM Based Fire Fighting RobotDokument35 SeitenGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- IJCRT1812243Dokument7 SeitenIJCRT1812243Shaheer AliNoch keine Bewertungen
- Multi-Purpose Robot Controlled via LabVIEW for Bomb Detection & DefusionDokument3 SeitenMulti-Purpose Robot Controlled via LabVIEW for Bomb Detection & DefusionRaviNoch keine Bewertungen
- Cell Phone Operated Land Rover/toy CarDokument46 SeitenCell Phone Operated Land Rover/toy Caranshul_all50% (2)
- Wireless Operated Fire Extinguisher Vehicles With Water Jet SprayDokument25 SeitenWireless Operated Fire Extinguisher Vehicles With Water Jet SprayRaushanVijaySinghNoch keine Bewertungen
- 1386camflougerobot BlueprintDokument22 Seiten1386camflougerobot BlueprintPrathamesh AsawaleNoch keine Bewertungen
- Distance Controlled Rescue and Security Mobile RobotDokument6 SeitenDistance Controlled Rescue and Security Mobile Robotmasud1470Noch keine Bewertungen
- Virtual Reality Robot with 3D Vision Provides Immersive Remote ExperienceDokument13 SeitenVirtual Reality Robot with 3D Vision Provides Immersive Remote ExperienceROHAN MUKESH SUMESARANoch keine Bewertungen
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDokument36 SeitenAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineNoch keine Bewertungen
- GSM Robotic ArmDokument68 SeitenGSM Robotic ArmParveen KumarNoch keine Bewertungen
- Android Phone Controlled Spy RobotDokument4 SeitenAndroid Phone Controlled Spy RobotInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- DTMF Controlled Robot Without MicrocontrollerDokument4 SeitenDTMF Controlled Robot Without MicrocontrollershanofaNoch keine Bewertungen
- Project Team: J.NIHAMATHULLAH (0905064) S.THAMEEN ANSARI (0905065) N.NAZEER AHAMED (0905072)Dokument12 SeitenProject Team: J.NIHAMATHULLAH (0905064) S.THAMEEN ANSARI (0905065) N.NAZEER AHAMED (0905072)Abhijit GondikarNoch keine Bewertungen
- RF Based Dual Mode RobotDokument17 SeitenRF Based Dual Mode Robotshuhaibasharaf100% (2)
- Fire Fighting RobotDokument60 SeitenFire Fighting RobotkalaivaniNoch keine Bewertungen
- PC Controlled Robot for Rescue OperationsDokument51 SeitenPC Controlled Robot for Rescue OperationsmahammadvasimkNoch keine Bewertungen
- RC CarDokument16 SeitenRC CarKanaka H KNoch keine Bewertungen
- PDF Maze Solver RobotDokument7 SeitenPDF Maze Solver RobotVenkat AlluNoch keine Bewertungen
- War Field Spying Robot With Night Vision Wireless CameraDokument3 SeitenWar Field Spying Robot With Night Vision Wireless CameraMaruthi JacsNoch keine Bewertungen
- Advanced Line FollowerDokument15 SeitenAdvanced Line FollowerMohtasim NakibNoch keine Bewertungen
- Mobile Controlled Robot Via GSM: Components UsedDokument4 SeitenMobile Controlled Robot Via GSM: Components UsedVishu GroverNoch keine Bewertungen
- Mobile Phone Operated Land Rover: AbstractDokument34 SeitenMobile Phone Operated Land Rover: AbstractVishal JainNoch keine Bewertungen
- Dokumen - Tips Arduino Line Follower RobotDokument10 SeitenDokumen - Tips Arduino Line Follower RobotAgung SetyonoNoch keine Bewertungen
- Bluetooth Technology Based Wireless War Field Robot With Night Vision CameraDokument4 SeitenBluetooth Technology Based Wireless War Field Robot With Night Vision CameraPranesh JewalikarNoch keine Bewertungen
- 2-Way Sound Sensitive Line FollowerDokument13 Seiten2-Way Sound Sensitive Line FollowerAbhishek DasNoch keine Bewertungen
- Cellphone Operated RobotDokument7 SeitenCellphone Operated RobotShashank AppiNoch keine Bewertungen
- Collision Avoiding RobotDokument9 SeitenCollision Avoiding RobotgauravjadonNoch keine Bewertungen
- Remote Controlled Robot Using ArduinoDokument5 SeitenRemote Controlled Robot Using ArduinodanielNoch keine Bewertungen
- Report FinaleDokument16 SeitenReport Finalewtpqk87nxcNoch keine Bewertungen
- LISTROBOTICS AND AUTOMATION PROJECTDokument6 SeitenLISTROBOTICS AND AUTOMATION PROJECTaamyaNoch keine Bewertungen
- 21.line Following RobotDokument78 Seiten21.line Following RobotsathishNoch keine Bewertungen
- Paper 13-Design of An Intelligent Combat Robot For War FieldDokument7 SeitenPaper 13-Design of An Intelligent Combat Robot For War FieldDhruv DalwadiNoch keine Bewertungen
- Hand Gesture Controlled RobotDokument59 SeitenHand Gesture Controlled RobotNiharikaNoch keine Bewertungen
- GSM Controlled CarDokument42 SeitenGSM Controlled CarGurhans Pal SinghNoch keine Bewertungen
- Robot Controlled by Android ApplicationDokument30 SeitenRobot Controlled by Android ApplicationTauheed MullaNoch keine Bewertungen
- Full Paper of Arduino Based Obstacle Avoidance RobotDokument3 SeitenFull Paper of Arduino Based Obstacle Avoidance RobotsabahatNoch keine Bewertungen
- Prosiding Paper 2010 EditDokument4 SeitenProsiding Paper 2010 EditNizam RashidNoch keine Bewertungen
- Obstacle Detecting Line Follower RobotDokument19 SeitenObstacle Detecting Line Follower RobotBibek Sau80% (5)
- VOICE AND BLUETOOTH CONTROLLED ROBOT - Amit KumarDokument14 SeitenVOICE AND BLUETOOTH CONTROLLED ROBOT - Amit Kumarpal sarvesh100% (1)
- Asfand Kamran LFR ReportDokument13 SeitenAsfand Kamran LFR ReportAbdul RaufNoch keine Bewertungen
- Remote Control Operated Spy Robot Circuit - Block DiagramDokument7 SeitenRemote Control Operated Spy Robot Circuit - Block Diagramanon_802118071Noch keine Bewertungen
- 7 - V Curves & Inv VDokument6 Seiten7 - V Curves & Inv VsasikalasivakumarNoch keine Bewertungen
- Solar Roof Top Packages On Grid PDFDokument36 SeitenSolar Roof Top Packages On Grid PDFsasikalasivakumarNoch keine Bewertungen
- EE1452 Opt PDFDokument7 SeitenEE1452 Opt PDFsasikalasivakumarNoch keine Bewertungen
- Sem May June 2007Dokument2 SeitenSem May June 2007sasikalasivakumarNoch keine Bewertungen
- Solar Power Plant DesignDokument51 SeitenSolar Power Plant Designswamychouhan100% (10)
- Vlsi DesignDokument25 SeitenVlsi DesignsasikalasivakumarNoch keine Bewertungen
- 4 - Asa MethodDokument8 Seiten4 - Asa MethodsasikalasivakumarNoch keine Bewertungen
- Tech Spec Annexure All in OneDokument74 SeitenTech Spec Annexure All in Onesasikalasivakumar100% (1)
- Solar Power Plant DesignDokument51 SeitenSolar Power Plant Designswamychouhan100% (10)
- SEM April May 2010Dokument1 SeiteSEM April May 2010sasikalasivakumarNoch keine Bewertungen
- SEM April May 2010 Question Papers - R.Anirudhan Part ADokument2 SeitenSEM April May 2010 Question Papers - R.Anirudhan Part AsasikalasivakumarNoch keine Bewertungen
- Ee2403 Notes PDFDokument78 SeitenEe2403 Notes PDFmalini72Noch keine Bewertungen
- 789456Dokument167 Seiten789456sasikalasivakumarNoch keine Bewertungen
- Ee2403 Sem 2 MarksDokument15 SeitenEe2403 Sem 2 MarksBala SubramanianNoch keine Bewertungen
- PDFDokument6 SeitenPDFsasikalasivakumarNoch keine Bewertungen
- High-Power Machine Drive, Using Nonredundant 27-Level Inverters and Active Front End RectifiersDokument7 SeitenHigh-Power Machine Drive, Using Nonredundant 27-Level Inverters and Active Front End RectifierssasikalasivakumarNoch keine Bewertungen
- An Efficient Algorithm For Power System Oscillation Damping Using TCSC ControllerDokument7 SeitenAn Efficient Algorithm For Power System Oscillation Damping Using TCSC ControllersasikalasivakumarNoch keine Bewertungen
- High-Power Machine Drive, Using Nonredundant 27-Level Inverters and Active Front End RectifiersDokument7 SeitenHigh-Power Machine Drive, Using Nonredundant 27-Level Inverters and Active Front End RectifierssasikalasivakumarNoch keine Bewertungen
- FPGA Implementation of IDEADokument7 SeitenFPGA Implementation of IDEAsasikalasivakumarNoch keine Bewertungen
- Optimization of Power System Stabilizers Relying On Particle Swarm OptimizersDokument8 SeitenOptimization of Power System Stabilizers Relying On Particle Swarm OptimizerssasikalasivakumarNoch keine Bewertungen
- Digital Image ProcessingDokument49 SeitenDigital Image ProcessingTamil ArasanNoch keine Bewertungen
- PWM RectifierDokument8 SeitenPWM RectifiersasikalasivakumarNoch keine Bewertungen
- Ee2403 Notes PDFDokument78 SeitenEe2403 Notes PDFmalini72Noch keine Bewertungen
- Digital Image ProcessingDokument10 SeitenDigital Image ProcessingsasikalasivakumarNoch keine Bewertungen
- Thermal Power Plant EngineeringDokument22 SeitenThermal Power Plant EngineeringsasikalasivakumarNoch keine Bewertungen
- Ee2403 Sem 2 MarksDokument15 SeitenEe2403 Sem 2 MarksBala SubramanianNoch keine Bewertungen
- Electrical Machine DesignDokument29 SeitenElectrical Machine DesignMahmoud Fawzi100% (1)
- Circuit TheoryDokument33 SeitenCircuit Theoryavi713331Noch keine Bewertungen
- EE2403 SEM Nov 2012 QP PDFDokument2 SeitenEE2403 SEM Nov 2012 QP PDFsasikalasivakumarNoch keine Bewertungen
- EE2403 SEM Nov 2012 QP PDFDokument2 SeitenEE2403 SEM Nov 2012 QP PDFsasikalasivakumarNoch keine Bewertungen
- Storage System & TechnologyDokument40 SeitenStorage System & TechnologyFarhan Sheikh MuhammadNoch keine Bewertungen
- Versatile, Compact, Up To 40 GHZ 170 GHZ With Upconverter: R&S®Smb100A Microwave Signal GeneratorDokument22 SeitenVersatile, Compact, Up To 40 GHZ 170 GHZ With Upconverter: R&S®Smb100A Microwave Signal Generatorketab_doostNoch keine Bewertungen
- Si5395 94 92 FamilyDokument237 SeitenSi5395 94 92 Familythe_citizen89Noch keine Bewertungen
- QwVdvbKESMynQYnD1kDL Script Enrutando ClientesXDiferentesWAN-1569079524738 PDFDokument2 SeitenQwVdvbKESMynQYnD1kDL Script Enrutando ClientesXDiferentesWAN-1569079524738 PDFED KnkxNoch keine Bewertungen
- Operation Manual: Tecsun Radios AustraliaDokument34 SeitenOperation Manual: Tecsun Radios AustraliaDiego García MedinaNoch keine Bewertungen
- ML0700Dokument13 SeitenML0700Carlos OrtegaNoch keine Bewertungen
- ADEMCO 6152RF Keypad / Transceiver - Installation and Setup GuideDokument8 SeitenADEMCO 6152RF Keypad / Transceiver - Installation and Setup GuidejhongudyNoch keine Bewertungen
- RCA Q1 Mobile Phone User ManualDokument2 SeitenRCA Q1 Mobile Phone User ManualKossuthos BélesNoch keine Bewertungen
- Ic 2730a Test ReportDokument30 SeitenIc 2730a Test ReportFrancisco GomesNoch keine Bewertungen
- University of Gondar Institute of Technology Department of Electrical and Computer Engineering Project ProposalDokument32 SeitenUniversity of Gondar Institute of Technology Department of Electrical and Computer Engineering Project ProposalDasale DaposNoch keine Bewertungen
- RAN - HWI - Guidelines - 4G - LTE Huawei - Telkomsel - v6Dokument34 SeitenRAN - HWI - Guidelines - 4G - LTE Huawei - Telkomsel - v6gery kaelNoch keine Bewertungen
- 2007 - Sony Product GuideDokument23 Seiten2007 - Sony Product GuideSeanNoch keine Bewertungen
- GSM-R Network in Indian RailwaysDokument29 SeitenGSM-R Network in Indian RailwaysvivechNoch keine Bewertungen
- (H660GW) DataSheet EN 170102 V1.1Dokument7 Seiten(H660GW) DataSheet EN 170102 V1.1Phạm MạnhNoch keine Bewertungen
- Enabling Technologies For Data Science Analytics - IoT - UNIT-I PDFDokument72 SeitenEnabling Technologies For Data Science Analytics - IoT - UNIT-I PDFabid princeNoch keine Bewertungen
- Fiber FAQs - Frequently Asked Questions - The Fiber Optic AssociationDokument33 SeitenFiber FAQs - Frequently Asked Questions - The Fiber Optic AssociationSsubrat RrudraNoch keine Bewertungen
- 16CH HDCVI User ManualDokument2 Seiten16CH HDCVI User Manualhamza dahbiNoch keine Bewertungen
- Engineering Encyclopedia: Fundamental of Radio CommunicationsDokument12 SeitenEngineering Encyclopedia: Fundamental of Radio Communicationscvg ertdNoch keine Bewertungen
- Computer Tools and Equipment Picture and Meaning - Google SearchDokument5 SeitenComputer Tools and Equipment Picture and Meaning - Google SearchTrofacir Eterravan AcilegnaNoch keine Bewertungen
- RPS SC200 MibDokument94 SeitenRPS SC200 MibZulfikar YahyaNoch keine Bewertungen
- 02 eRAN15.0 4T4R Test GuideDokument47 Seiten02 eRAN15.0 4T4R Test Guidemohamed fadl100% (2)
- HP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoDokument4 SeitenHP Pavilion 14 - x360 Touchscreen 2-In-1 Laptop - 12th Gen Intel Core I5-1235u - 1080p - Windows 11 - CostcoTanish JainNoch keine Bewertungen
- Unit 1 CorrectedDokument9 SeitenUnit 1 CorrectedMegala SeshaNoch keine Bewertungen
- Microchip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBDokument68 SeitenMicrochip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBSi Thu TunNoch keine Bewertungen
- Optical Disk StorageDokument24 SeitenOptical Disk StorageShahjahan SialNoch keine Bewertungen
- Awp QuizDokument6 SeitenAwp QuizOral RobertzNoch keine Bewertungen
- Ict Curriculum Scert DelhiDokument25 SeitenIct Curriculum Scert DelhiNenhahNoch keine Bewertungen
- b10 Digi Xbee Zigbee DsDokument3 Seitenb10 Digi Xbee Zigbee DsSachinda ThakurNoch keine Bewertungen
- Samsung HT-TXQ120Dokument36 SeitenSamsung HT-TXQ120Technics39Noch keine Bewertungen
- Yamaha PSR 225Dokument29 SeitenYamaha PSR 225Daniel YañezNoch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsVon EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsBewertung: 4 von 5 Sternen4/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsVon EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsBewertung: 5 von 5 Sternen5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Von EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Bewertung: 5 von 5 Sternen5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemVon EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNoch keine Bewertungen
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4 von 5 Sternen4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveVon EverandUnderstanding Automotive Electronics: An Engineering PerspectiveBewertung: 3.5 von 5 Sternen3.5/5 (16)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- 8051 Microcontroller: An Applications Based IntroductionVon Everand8051 Microcontroller: An Applications Based IntroductionBewertung: 5 von 5 Sternen5/5 (6)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingVon EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingBewertung: 4 von 5 Sternen4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesVon EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesBewertung: 5 von 5 Sternen5/5 (1)
- Build Your Own Electric Vehicle, Third EditionVon EverandBuild Your Own Electric Vehicle, Third EditionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowVon EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNoch keine Bewertungen
- The Rare Metals War: the dark side of clean energy and digital technologiesVon EverandThe Rare Metals War: the dark side of clean energy and digital technologiesBewertung: 5 von 5 Sternen5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 5 von 5 Sternen5/5 (8)
- Beginner's Guide to Reading Schematics, Fourth EditionVon EverandBeginner's Guide to Reading Schematics, Fourth EditionBewertung: 3.5 von 5 Sternen3.5/5 (10)
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)
- Operational Amplifier Circuits: Analysis and DesignVon EverandOperational Amplifier Circuits: Analysis and DesignBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsVon EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsBewertung: 5 von 5 Sternen5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinVon EverandThe Graphene Revolution: The Weird Science of the Ultra-thinBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Electrical Principles and Technology for EngineeringVon EverandElectrical Principles and Technology for EngineeringBewertung: 4 von 5 Sternen4/5 (4)