Das könnte Ihnen auch gefallen
- Free JioDokument4 SeitenFree JioraviNoch keine Bewertungen
- Design and Optimization of A Mars Rover's Rocker-Bogie MechanismDokument6 SeitenDesign and Optimization of A Mars Rover's Rocker-Bogie MechanismKanna MonishNoch keine Bewertungen
- Design of Rocker-Bogie Mechanism For Application in AgricultureDokument4 SeitenDesign of Rocker-Bogie Mechanism For Application in AgricultureKanna MonishNoch keine Bewertungen
- Design Analysis of Rocker Bogie Suspension System and Access The Possibility To Implement in Front Loading VehiclesDokument4 SeitenDesign Analysis of Rocker Bogie Suspension System and Access The Possibility To Implement in Front Loading VehiclesIOSRjournalNoch keine Bewertungen
- RockerboggieresearchpprDokument5 SeitenRockerboggieresearchpprSuryank JoshiNoch keine Bewertungen
- Rocker BogieDokument12 SeitenRocker BogieIJRASETPublicationsNoch keine Bewertungen
- Rocker Bogie Suspension Analysis for Front Loading VehiclesDokument8 SeitenRocker Bogie Suspension Analysis for Front Loading Vehiclesravi0% (1)
- Design and Fabrication of Rocker Bogie Mechanism: K. H C, P. H N, K. C. C T, B. S, Y. M MDokument4 SeitenDesign and Fabrication of Rocker Bogie Mechanism: K. H C, P. H N, K. C. C T, B. S, Y. M MKanna MonishNoch keine Bewertungen
- Design of A Rocker Bogie With Spherical Wheel Insertion: Gautam Buragohain, Karan Borah, Rakesh NathDokument2 SeitenDesign of A Rocker Bogie With Spherical Wheel Insertion: Gautam Buragohain, Karan Borah, Rakesh NathSelva vjNoch keine Bewertungen
- Rover with ultrasonic sensor and Bluetooth moduleDokument5 SeitenRover with ultrasonic sensor and Bluetooth moduleshaik roshanNoch keine Bewertungen
- Multi Terrain Vehicle by Using Rocker Bogie MechanismDokument2 SeitenMulti Terrain Vehicle by Using Rocker Bogie MechanismRAGHU VAMSINoch keine Bewertungen
- Aryan Gupta rollno.2K20A538 ME101partbMTEDokument14 SeitenAryan Gupta rollno.2K20A538 ME101partbMTEishaNoch keine Bewertungen
- Adaptive Suspension System For Mars RoverDokument6 SeitenAdaptive Suspension System For Mars RoverSamin ZarifNoch keine Bewertungen
- Rocker Bogie Mechanism DesignDokument5 SeitenRocker Bogie Mechanism DesignVinoth Rouge RockersNoch keine Bewertungen
- 360 Rotation of "Kinematic Walker Mechanism": Project Reference No.: 40S - Be - 1669Dokument4 Seiten360 Rotation of "Kinematic Walker Mechanism": Project Reference No.: 40S - Be - 1669ibrahimNoch keine Bewertungen
- The Initiation of Rocker Bogie Suspension System Can Be Traced To The Development of Planetary Over Which Are Mobile RobotsDokument2 SeitenThe Initiation of Rocker Bogie Suspension System Can Be Traced To The Development of Planetary Over Which Are Mobile Robotssuri babuNoch keine Bewertungen
- "Rocker Bogie Mechanism": - Under Guidance of Er. Sunil Kumar (Dept. of Mechanical Engineering)Dokument3 Seiten"Rocker Bogie Mechanism": - Under Guidance of Er. Sunil Kumar (Dept. of Mechanical Engineering)Kanna MonishNoch keine Bewertungen
- Rocker Bogie Robot/Rover: Submitted in Partial Fulfilment of B.TECH ProgramDokument6 SeitenRocker Bogie Robot/Rover: Submitted in Partial Fulfilment of B.TECH ProgramAkash AggarwalNoch keine Bewertungen
- Design and Analysis of Multipurpose Relief VehicleDokument13 SeitenDesign and Analysis of Multipurpose Relief VehicleIJRASETPublicationsNoch keine Bewertungen
- Design and Fabrication of Wheel Chair Using Rocker Bogie MechanismDokument4 SeitenDesign and Fabrication of Wheel Chair Using Rocker Bogie MechanismEditor IJTSRDNoch keine Bewertungen
- Iarjset-Ncdmete 13 PDFDokument5 SeitenIarjset-Ncdmete 13 PDFDeepak sutar100% (1)
- High Speed Traversal Using Rocker BogieDokument7 SeitenHigh Speed Traversal Using Rocker BogieLuis VelascoNoch keine Bewertungen
- Design, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Dokument15 SeitenDesign, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Tejas PrakashNoch keine Bewertungen
- Rocker Bogie WikipediaDokument10 SeitenRocker Bogie WikipediaMohammed AhmedNoch keine Bewertungen
- Design of Rocker-Bogie MechanismDokument27 SeitenDesign of Rocker-Bogie MechanismInternational Journal of Innovative Science and Research Technology86% (7)
- Mars Rover Designed For Mechanisms Rocky IVDokument14 SeitenMars Rover Designed For Mechanisms Rocky IVjosepezalazaroNoch keine Bewertungen
- Conventional and Slip Steering For Multi-Wheel Planetary RoversDokument39 SeitenConventional and Slip Steering For Multi-Wheel Planetary RoversGreggs ShopukNoch keine Bewertungen
- Design of Rocker-Bogie MechanismDokument27 SeitenDesign of Rocker-Bogie MechanismInternational Journal of Innovative Science and Research Technology60% (5)
- Design & Fabrication of Rocker-Bogie MechanismDokument39 SeitenDesign & Fabrication of Rocker-Bogie MechanismHarshal PatilNoch keine Bewertungen
- Rough Terrain Vehicle Using Rocker Bogie MechanismDokument7 SeitenRough Terrain Vehicle Using Rocker Bogie MechanismKalai SelvanNoch keine Bewertungen
- Fabrication of Rough Terrain Vehicle Using Rocker Bogie MechanismDokument5 SeitenFabrication of Rough Terrain Vehicle Using Rocker Bogie Mechanism_hrithik_rkNoch keine Bewertungen
- Prof. Ram Meghe Institute of Technology & Research, BadneraDokument21 SeitenProf. Ram Meghe Institute of Technology & Research, BadneraHarshal SelkarNoch keine Bewertungen
- Planetry RoverDokument8 SeitenPlanetry RoverAnanya KankaneNoch keine Bewertungen
- An Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismDokument8 SeitenAn Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismIJRASETPublicationsNoch keine Bewertungen
- Analysis of Perseverance Rover's WheelsDokument12 SeitenAnalysis of Perseverance Rover's WheelsNouman Aqil100% (1)
- Report 17pg.Dokument14 SeitenReport 17pg.AchuthanNoch keine Bewertungen
- Dynamics of Machine ProjectDokument7 SeitenDynamics of Machine ProjectKotadpp KumarNoch keine Bewertungen
- Design and Synthesis of Eight-Legged Spider RobotDokument11 SeitenDesign and Synthesis of Eight-Legged Spider RobotIJRASETPublicationsNoch keine Bewertungen
- Intech-Ball Shaped RobotsDokument24 SeitenIntech-Ball Shaped RobotsZeR0 CountNoch keine Bewertungen
- 4 - Minimalist Jumping Robots For Celestial ExplorationDokument22 Seiten4 - Minimalist Jumping Robots For Celestial ExplorationjowdiverNoch keine Bewertungen
- Ball-Shaped Robots: Tomi Ylikorpi and Jussi SuomelaDokument3 SeitenBall-Shaped Robots: Tomi Ylikorpi and Jussi SuomelaAswin MuraliNoch keine Bewertungen
- Deformable-Wheel Robot Based On Soft MaterialDokument7 SeitenDeformable-Wheel Robot Based On Soft Materialchutiya chamanNoch keine Bewertungen
- An Innovative Space Rover With Extended Climbing AbilitiesDokument7 SeitenAn Innovative Space Rover With Extended Climbing AbilitiesEdwin Alvarez GutierrezNoch keine Bewertungen
- Design & Modification of Adriano Based Rocker Bogie Mechanism For Security PurposeDokument27 SeitenDesign & Modification of Adriano Based Rocker Bogie Mechanism For Security PurposeAhMEd KhanNoch keine Bewertungen
- Rough Terrain VehicleDokument13 SeitenRough Terrain VehicleEr Sahil KhanNoch keine Bewertungen
- Design and Synthesis of Eight-Legged Spider RobotDokument23 SeitenDesign and Synthesis of Eight-Legged Spider RobotPrakash ShendeNoch keine Bewertungen
- Rocker Bogie MechanismDokument12 SeitenRocker Bogie MechanismHarshvardhan DNoch keine Bewertungen
- Project ReportDokument40 SeitenProject ReportRahul Hans67% (15)
- Rocker Bogie Mechanism for Rough Terrain VehiclesDokument3 SeitenRocker Bogie Mechanism for Rough Terrain VehiclesNiraj SinghNoch keine Bewertungen
- Rough Terrain Vehicle Using Rocker Bogie MechanismDokument3 SeitenRough Terrain Vehicle Using Rocker Bogie MechanismRaj SudhanshuNoch keine Bewertungen
- Irjet V5i5622Dokument6 SeitenIrjet V5i5622TrươngVănMếnNoch keine Bewertungen
- InTech-Omnidirectional Mobile Robot Design and ImplementationDokument18 SeitenInTech-Omnidirectional Mobile Robot Design and ImplementationSenthil KumarNoch keine Bewertungen
- The Challenges of Designing The Rocker-Bogie Suspension For The Mars Exploration RoverDokument11 SeitenThe Challenges of Designing The Rocker-Bogie Suspension For The Mars Exploration RoverAkshay29Noch keine Bewertungen
- 7261 20140617 iSAIRAS14 CordesEtAl ActiveSuspensionPlanetaryRoverDokument7 Seiten7261 20140617 iSAIRAS14 CordesEtAl ActiveSuspensionPlanetaryRoverKevin DominichNoch keine Bewertungen
- Final - 2018 Ieee Aerospace TRCTLDokument37 SeitenFinal - 2018 Ieee Aerospace TRCTLTeofilo GrandaNoch keine Bewertungen
- The Klann Linkage Is A PlanarDokument17 SeitenThe Klann Linkage Is A PlanarslitantNoch keine Bewertungen
- Machines 10 00632 v2Dokument17 SeitenMachines 10 00632 v2Woodrow FoxNoch keine Bewertungen
- 1st Stage Report On Hill Climbing Robot by Klanns MechanismDokument23 Seiten1st Stage Report On Hill Climbing Robot by Klanns MechanismEDUMECH SOLUTIONNoch keine Bewertungen
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesVon EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesNoch keine Bewertungen
- Sample New and Complex Function Idea:: 1. Determination of Software and Hardware ArchitectureDokument1 SeiteSample New and Complex Function Idea:: 1. Determination of Software and Hardware ArchitectureKanna MonishNoch keine Bewertungen
- Best Ref PaperDokument25 SeitenBest Ref PaperKanna MonishNoch keine Bewertungen
- A 7-Step Guide To Implementing Robotic AutomationDokument2 SeitenA 7-Step Guide To Implementing Robotic AutomationKanna MonishNoch keine Bewertungen
- Framework To Implement Collaborative Robots in Manual Assembly: A Lean Automation ApproachDokument11 SeitenFramework To Implement Collaborative Robots in Manual Assembly: A Lean Automation ApproachKanna MonishNoch keine Bewertungen
- QA Graduate AnnualDokument3 SeitenQA Graduate AnnualKanna MonishNoch keine Bewertungen
- Implement Industrial RobotsDokument3 SeitenImplement Industrial RobotsKanna MonishNoch keine Bewertungen
- Plagiarism Scan Report: Plagiarised Unique Words CharactersDokument1 SeitePlagiarism Scan Report: Plagiarised Unique Words CharactersKanna MonishNoch keine Bewertungen
- MRK Leitfaden - EnglishDokument48 SeitenMRK Leitfaden - EnglishKanna MonishNoch keine Bewertungen
- Human-Robot Collaboration A SurveyDokument21 SeitenHuman-Robot Collaboration A SurveyKanna MonishNoch keine Bewertungen
- Human - Robot Collaboration in Industry: MM Science Journal June 2016Dokument5 SeitenHuman - Robot Collaboration in Industry: MM Science Journal June 2016Kanna MonishNoch keine Bewertungen
- Foundation For A Classification of Collaboration Levels For Human Robot Cooperation in ManufacturingDokument25 SeitenFoundation For A Classification of Collaboration Levels For Human Robot Cooperation in ManufacturingKanna MonishNoch keine Bewertungen
- Decision Support System for Robot Selection based on Axiomatic DesignDokument11 SeitenDecision Support System for Robot Selection based on Axiomatic DesignKanna MonishNoch keine Bewertungen
- Annual Maintenance Program For EnMontoRDokument2 SeitenAnnual Maintenance Program For EnMontoRKanna MonishNoch keine Bewertungen
- En Iso 11161Dokument2 SeitenEn Iso 11161Kishor Deshmukh0% (1)
- Tipps On How To Create A ProfileDokument2 SeitenTipps On How To Create A ProfileKanna MonishNoch keine Bewertungen
- Unit 2 PDFDokument30 SeitenUnit 2 PDFKanna MonishNoch keine Bewertungen
- Safety Standards and the Rise of Collaborative RobotsDokument32 SeitenSafety Standards and the Rise of Collaborative RobotsudbarryNoch keine Bewertungen
- Collaborative Robots Comparison Chart - Collaborative Robotics TrendsDokument3 SeitenCollaborative Robots Comparison Chart - Collaborative Robotics TrendsKanna MonishNoch keine Bewertungen
- Corona - Virus QuestionDokument1 SeiteCorona - Virus QuestionKanna MonishNoch keine Bewertungen
- Lecture White Board 20201103Dokument1 SeiteLecture White Board 20201103Kanna MonishNoch keine Bewertungen
- Rover Bogie MechanismDokument6 SeitenRover Bogie MechanismKanna Monish100% (1)
- Antrag Auf Zulassung Zum StudiumDokument4 SeitenAntrag Auf Zulassung Zum StudiumBijoyBanikNoch keine Bewertungen
- Here Are Your Top 3 Ideal CareersDokument6 SeitenHere Are Your Top 3 Ideal CareersKanna MonishNoch keine Bewertungen
- Corona - Virus QuestionDokument1 SeiteCorona - Virus QuestionKanna MonishNoch keine Bewertungen
- Module Guide Mechatronic and Cyber-Physical SystemsDokument49 SeitenModule Guide Mechatronic and Cyber-Physical SystemsMohamed Ashraf BarakaNoch keine Bewertungen
- Unit 2 PDFDokument30 SeitenUnit 2 PDFKanna MonishNoch keine Bewertungen
- B.e.cseDokument107 SeitenB.e.cseSangeetha ShankaranNoch keine Bewertungen
- NASA/NIA RASC-AL Exploration Robo-Ops Competition Sample Acquisition SystemDokument1 SeiteNASA/NIA RASC-AL Exploration Robo-Ops Competition Sample Acquisition SystemKanna MonishNoch keine Bewertungen
- Unit 2 PDFDokument30 SeitenUnit 2 PDFKanna MonishNoch keine Bewertungen
- Modelling and Dynamic Analysis of Rocker-Bogie Rover For Space ExplorationDokument54 SeitenModelling and Dynamic Analysis of Rocker-Bogie Rover For Space ExplorationKanna MonishNoch keine Bewertungen
- SCR Training ReportDokument19 SeitenSCR Training ReportKARTAVYANoch keine Bewertungen
- The Wheels On The Bus Learn It PDFDokument5 SeitenThe Wheels On The Bus Learn It PDFcazanandreeaNoch keine Bewertungen
- Rail Express - Issue 295 - December 2020 PDFDokument92 SeitenRail Express - Issue 295 - December 2020 PDFN Say100% (1)
- Denso Price ListDokument16 SeitenDenso Price ListJoby MathewNoch keine Bewertungen
- Goldseal - Saargummi India Pvt. LTD.: Products For Maruti VehiclesDokument11 SeitenGoldseal - Saargummi India Pvt. LTD.: Products For Maruti VehiclesAMOL GHOTEKARNoch keine Bewertungen
- G. Howell - The Human MemoirsDokument355 SeitenG. Howell - The Human MemoirsdrqubitNoch keine Bewertungen
- Vehicle Drag ReductionDokument2 SeitenVehicle Drag Reductionpero pericNoch keine Bewertungen
- Assignment 03Dokument3 SeitenAssignment 03Anonymous pI3JwbypCNoch keine Bewertungen
- Loading Guidelines Volume1Dokument131 SeitenLoading Guidelines Volume1AndreiCabaNoch keine Bewertungen
- Questionnaire For en 15085Dokument4 SeitenQuestionnaire For en 150850502ravi100% (2)
- Know Indian Railways WagonDokument79 SeitenKnow Indian Railways WagonPrasant SahayNoch keine Bewertungen
- Volkswagen Assembly Plant Price ListDokument1 SeiteVolkswagen Assembly Plant Price ListJoseph KiipoNoch keine Bewertungen
- CALL ME FLORY: A Satire on Philippine SocietyDokument5 SeitenCALL ME FLORY: A Satire on Philippine Societydiday salcedoNoch keine Bewertungen
- 1937passenger Grille Hood FenderDokument2 Seiten1937passenger Grille Hood FenderMarcelo Diaz WongNoch keine Bewertungen
- 5c812ecf-cb82-4436-80d1-db8daa9dda51Dokument7 Seiten5c812ecf-cb82-4436-80d1-db8daa9dda51rajrajeswariNoch keine Bewertungen
- Car Types: Quick ReferenceDokument4 SeitenCar Types: Quick ReferenceSeba311Noch keine Bewertungen
- State of the Art Report on Freight Train AerodynamicsDokument186 SeitenState of the Art Report on Freight Train AerodynamicsGabriel CaraveteanuNoch keine Bewertungen
- Drive ShaftDokument52 SeitenDrive ShaftManny AnacletoNoch keine Bewertungen
- Leaf SpringDokument55 SeitenLeaf SpringPatel Harsh100% (1)
- #3 Caedo vs. Yu Khe ThaiDokument1 Seite#3 Caedo vs. Yu Khe ThaiJanine AranasNoch keine Bewertungen
- Electric Rack and Adhesion Locomotive He 4/4: For MRS Logística S.A., BrazilDokument2 SeitenElectric Rack and Adhesion Locomotive He 4/4: For MRS Logística S.A., Brazilcosty_transNoch keine Bewertungen
- Calculating Commercial Vehicle Weight DistributionDokument7 SeitenCalculating Commercial Vehicle Weight Distributionnaimakruk50% (2)
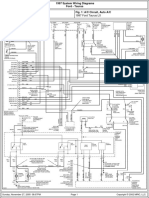
- Ford Taurus 1997 Wiring-1 PDFDokument76 SeitenFord Taurus 1997 Wiring-1 PDFJoel HernandezNoch keine Bewertungen
- Suspension SystemDokument77 SeitenSuspension SystemLakshmiprasad KadariNoch keine Bewertungen
- Railteco Group: Railway Wagon & Bogie ManufacturerDokument52 SeitenRailteco Group: Railway Wagon & Bogie ManufacturerJose RodriguezNoch keine Bewertungen
- Model Rail 202108Dokument140 SeitenModel Rail 202108Martijn Hinfelaar100% (2)
- 5 - Hand Trucks & Dollies: Safety Training: Eh&S - MgaDokument2 Seiten5 - Hand Trucks & Dollies: Safety Training: Eh&S - MgaDaniel MihailaNoch keine Bewertungen
- Job Description - Truck DriverDokument1 SeiteJob Description - Truck DriverLopchang Lopchang100% (1)
- From - The - Black - Sea - Through - Persia - and - in 13Dokument467 SeitenFrom - The - Black - Sea - Through - Persia - and - in 13Owais QadeerNoch keine Bewertungen
- History of The Automobile - The Brands PDFDokument177 SeitenHistory of The Automobile - The Brands PDFfiat127sport100% (1)