Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- NASA TMX-64623 Rover Mobility SystemsDokument41 SeitenNASA TMX-64623 Rover Mobility SystemsalmostreadyNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- MQXTUTORIALLABDokument16 SeitenMQXTUTORIALLABalmostreadyNoch keine Bewertungen
- NASA D5-13183 Saturn Upgrade StudyDokument118 SeitenNASA D5-13183 Saturn Upgrade Studyalmostready100% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- NASA 5084 M1 Project (SaturnV OnDokument40 SeitenNASA 5084 M1 Project (SaturnV Onalmostready100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Army Ordnance Satellite ProgramDokument180 SeitenArmy Ordnance Satellite Programalmostready100% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- EST Sample Problems 06Dokument5 SeitenEST Sample Problems 06Genesis PinedaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- DPMErr SEDokument10 SeitenDPMErr SEarelyta8123Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Physics II Problems PDFDokument1 SeitePhysics II Problems PDFBOSS BOSS0% (1)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- JNTUH - B Tech - 2019 - 3 2 - May - R18 - EEE - 136FT PCCN Principles of Computer Communications andDokument2 SeitenJNTUH - B Tech - 2019 - 3 2 - May - R18 - EEE - 136FT PCCN Principles of Computer Communications andNaga SekharNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- VSAT Agilis Transreceivers 20w To 60wpdfDokument2 SeitenVSAT Agilis Transreceivers 20w To 60wpdfnyanhtunNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 3W Ultra-Compact Power Module HLK-PM01 230V AC To 5V/3W DC: FeaturesDokument6 Seiten3W Ultra-Compact Power Module HLK-PM01 230V AC To 5V/3W DC: FeaturesmachogamerNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- 4.28 Analog Output Module SM 332 AO 4 (6ES7332-5HD01-0AB0) : X 12 BitsDokument4 Seiten4.28 Analog Output Module SM 332 AO 4 (6ES7332-5HD01-0AB0) : X 12 BitsMarco BustosNoch keine Bewertungen
- Panasonic SA UX100PPDokument21 SeitenPanasonic SA UX100PPboroda2410100% (3)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Accident Statistics, Buzzer During Any AccidentDokument30 SeitenAccident Statistics, Buzzer During Any Accidentpray1979567% (6)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Performance Improvement of Synchronous Generator by Stator WindingDokument6 SeitenPerformance Improvement of Synchronous Generator by Stator WindingIAEME PublicationNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Amigos Comparto El Metodo de F4 para SM G610M Bin 3Dokument2 SeitenAmigos Comparto El Metodo de F4 para SM G610M Bin 3Braulio Sanchez100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- AlternatorDokument27 SeitenAlternatorseikh_aiNoch keine Bewertungen
- Iec60044-1 (Ed1.2) en D PDFDokument8 SeitenIec60044-1 (Ed1.2) en D PDFAnton HidayatNoch keine Bewertungen
- Instructional MaterialsDokument50 SeitenInstructional Materialsanir100% (1)
- Inverter 200 KWDokument2 SeitenInverter 200 KWnotsag001Noch keine Bewertungen
- Bluetooth RC Drift CarDokument7 SeitenBluetooth RC Drift CarAbanob HanyNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Air Flow SensorDokument23 SeitenAir Flow SensorRinus ZoetebierNoch keine Bewertungen
- GeoMax Zoom80 TechRef v3-0-1 En-1-100 PDFDokument100 SeitenGeoMax Zoom80 TechRef v3-0-1 En-1-100 PDFjoseNoch keine Bewertungen
- 3M QS1000 Cold Shrink Joints (11kV) - Data SheetDokument1 Seite3M QS1000 Cold Shrink Joints (11kV) - Data SheetccalvinteyNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Application Guidelines MEEPEDokument2 SeitenApplication Guidelines MEEPEavionicsnabinNoch keine Bewertungen
- Robots Artificial Intelligence NanotechnologyDokument2 SeitenRobots Artificial Intelligence NanotechnologyMicrovoltz Engineering servicesNoch keine Bewertungen
- Simulation Paper 8Dokument8 SeitenSimulation Paper 8Sandip KumarNoch keine Bewertungen
- Non-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineDokument16 SeitenNon-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineOmar RodriguezNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Initial Course of Radio Mod4 (Zetron)Dokument10 SeitenInitial Course of Radio Mod4 (Zetron)Maclin TuduNoch keine Bewertungen
- Sheet 2: Example 1: A 20 kVA, 2500/250 V, 50Hz, Single-Phase Transformer Gave TheDokument3 SeitenSheet 2: Example 1: A 20 kVA, 2500/250 V, 50Hz, Single-Phase Transformer Gave Thetareq omar67% (6)
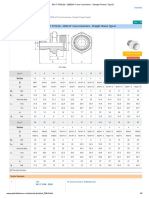
- GB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BDokument3 SeitenGB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BEr.Amritpal SinghNoch keine Bewertungen
- BZX55CV24Dokument4 SeitenBZX55CV24kcraussNoch keine Bewertungen
- UEE Braking MCQDokument14 SeitenUEE Braking MCQDeshbhsuhan SangaleNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)