Das könnte Ihnen auch gefallen
- Obstacle Detecting Line Follower RobotDokument19 SeitenObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Robo Instructors Group Builds Line-Following Robot Under 3KDokument6 SeitenRobo Instructors Group Builds Line-Following Robot Under 3KAftab Mustafa QureshiNoch keine Bewertungen
- Obstacle Avoiding RobotDokument4 SeitenObstacle Avoiding Robotvijay kumarNoch keine Bewertungen
- PDF Maze Solver RobotDokument7 SeitenPDF Maze Solver RobotVenkat AlluNoch keine Bewertungen
- Arduino Propeller LED DisplayDokument8 SeitenArduino Propeller LED DisplayHamzaNoch keine Bewertungen
- Advanced Line FollowerDokument15 SeitenAdvanced Line FollowerMohtasim NakibNoch keine Bewertungen
- Obstacle Detecting Line Follower Robot PDFDokument19 SeitenObstacle Detecting Line Follower Robot PDFA Fo AnkitNoch keine Bewertungen
- DLD PROJECT-Ayusha Vinayak Jagtap 211071071Dokument6 SeitenDLD PROJECT-Ayusha Vinayak Jagtap 211071071Ayusha JagtapNoch keine Bewertungen
- Project Report: Btech-Mechanical EngineeringDokument17 SeitenProject Report: Btech-Mechanical EngineeringNaveen SNoch keine Bewertungen
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Dokument34 SeitenObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Omsai AyyappaNoch keine Bewertungen
- Autonoums Robotics Part 1: IR Led Detector CKTDokument14 SeitenAutonoums Robotics Part 1: IR Led Detector CKTSameer SalamNoch keine Bewertungen
- Making of IR Sensor ModuleDokument18 SeitenMaking of IR Sensor ModuleGhigoarta Sergiu DanielNoch keine Bewertungen
- Automatic Hand Sanitizer Using IRDokument6 SeitenAutomatic Hand Sanitizer Using IRsmartxdigital marketNoch keine Bewertungen
- Non Programmable Line Follower RobotDokument27 SeitenNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- Line Follower ReportDokument23 SeitenLine Follower Reportatul mishra88% (8)
- Build Line Following Robot Using Arduino and Infrared LEDDokument5 SeitenBuild Line Following Robot Using Arduino and Infrared LEDmetalpowerNoch keine Bewertungen
- PROJECT Obstacle Avoiding RobotDokument3 SeitenPROJECT Obstacle Avoiding RobotRishi SharmaNoch keine Bewertungen
- Advance Robotics - Self - Learning Kit - ArduinoDokument68 SeitenAdvance Robotics - Self - Learning Kit - ArduinoHarry George ElangbamNoch keine Bewertungen
- Control Lamp Using IR SensorDokument5 SeitenControl Lamp Using IR Sensorsmartxdigital marketNoch keine Bewertungen
- Parts Needed:-: IR SensorDokument6 SeitenParts Needed:-: IR SensorkjsdjkfNoch keine Bewertungen
- Motor Driver Circuit For ArduinoDokument5 SeitenMotor Driver Circuit For ArduinoEko Hadi SusantoNoch keine Bewertungen
- Project Report: Digital Logic DesignsDokument17 SeitenProject Report: Digital Logic DesignsSiddique FarooqNoch keine Bewertungen
- Line Robot FollowerDokument23 SeitenLine Robot Followeratul mishra100% (1)
- DIY Remote Control Car - How To Make Your Own RC Car! - DIY HackingDokument9 SeitenDIY Remote Control Car - How To Make Your Own RC Car! - DIY HackingAditya ShindeNoch keine Bewertungen
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Dokument33 SeitenObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Debojit DasNoch keine Bewertungen
- 2-Way Sound Sensitive Line FollowerDokument13 Seiten2-Way Sound Sensitive Line FollowerAbhishek DasNoch keine Bewertungen
- Smartphone Controlled Arduino Rover PDFDokument30 SeitenSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Automatic Water Dispenser Using IR PairDokument6 SeitenAutomatic Water Dispenser Using IR Pairsmartxdigital marketNoch keine Bewertungen
- Control Relay Using IR SensorDokument5 SeitenControl Relay Using IR Sensorsmartxdigital marketNoch keine Bewertungen
- Line Following Robot Project ReportDokument9 SeitenLine Following Robot Project ReportBilal ShafiNoch keine Bewertungen
- LFR Tutorial CompleteDokument22 SeitenLFR Tutorial CompleteTraic Club0% (1)
- Control Lamp IR Sensor CircuitDokument5 SeitenControl Lamp IR Sensor CircuitVijay KrishnaNoch keine Bewertungen
- Mini Project ReportDokument9 SeitenMini Project ReportShiekh LafeezNoch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotVenkat Munnangi100% (1)
- LINE - MAZE SOLVING ROBOTDokument10 SeitenLINE - MAZE SOLVING ROBOTtcteh86Noch keine Bewertungen
- Obstacle Avoidance RobotDokument9 SeitenObstacle Avoidance Robotnagasaikiran ponnapalliNoch keine Bewertungen
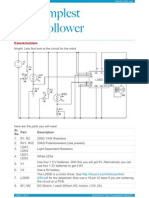
- The Simplest Line Follower: ConstructionDokument5 SeitenThe Simplest Line Follower: Constructionapi-115728880Noch keine Bewertungen
- Line Follower Robot Using ArduinoDokument5 SeitenLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosNoch keine Bewertungen
- LINE FOLLOWER ROBOT SYNOPSISDokument14 SeitenLINE FOLLOWER ROBOT SYNOPSISAshmeet SabbyNoch keine Bewertungen
- Obstacle Avoiding 4WD Arduino Robot Project ReportDokument12 SeitenObstacle Avoiding 4WD Arduino Robot Project ReportLahmeen HaiderNoch keine Bewertungen
- Mobot Bluetooth RobotDokument7 SeitenMobot Bluetooth Robotapi-115728880Noch keine Bewertungen
- GSM Robotic ArmDokument68 SeitenGSM Robotic ArmParveen KumarNoch keine Bewertungen
- RobotBuilding Chapter2Dokument15 SeitenRobotBuilding Chapter2suresh051Noch keine Bewertungen
- Design and Implementation of Autonomous Photovore Robot With Obstacle Avoidance (MAE 4733 Term Final Project Report)Dokument27 SeitenDesign and Implementation of Autonomous Photovore Robot With Obstacle Avoidance (MAE 4733 Term Final Project Report)shuvrabanikNoch keine Bewertungen
- Project Report: Line Following RobotDokument12 SeitenProject Report: Line Following RobotAhsan MuradNoch keine Bewertungen
- Line Follower Robot Using ArduinoDokument13 SeitenLine Follower Robot Using Arduinolizhi2012Noch keine Bewertungen
- Automatic Street Light Circuit Using LDRDokument5 SeitenAutomatic Street Light Circuit Using LDRsmartxdigital marketNoch keine Bewertungen
- Robotics Module 3 PRINTDokument32 SeitenRobotics Module 3 PRINTmaxmanishNoch keine Bewertungen
- Street Light That Glows On Detecting Vehicle Movement Using Ir SensorDokument15 SeitenStreet Light That Glows On Detecting Vehicle Movement Using Ir SensorKaos Polos Nakira75% (4)
- Line Follower Robot Using LabVIEWDokument6 SeitenLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNoch keine Bewertungen
- Simple Steps To Building Your Own Line - Part IDokument5 SeitenSimple Steps To Building Your Own Line - Part IAnishRameshNoch keine Bewertungen
- RF Based Dual Mode RobotDokument17 SeitenRF Based Dual Mode Robotshuhaibasharaf100% (2)
- DIY IR Proximity SensorDokument5 SeitenDIY IR Proximity SensorMihai BogdanNoch keine Bewertungen
- Induction Motor Vibration DetectionDokument5 SeitenInduction Motor Vibration Detectionsmartxdigital marketNoch keine Bewertungen
- REPORTDokument22 SeitenREPORThohi4808Noch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotRohit sharmaNoch keine Bewertungen
- Propeller Clock - FinalDokument19 SeitenPropeller Clock - FinalRahul AgarwalNoch keine Bewertungen
- A Geek Girl's Guide to Electronics and the Internet of ThingsVon EverandA Geek Girl's Guide to Electronics and the Internet of ThingsNoch keine Bewertungen
- Exploring Arduino: Tools and Techniques for Engineering WizardryVon EverandExploring Arduino: Tools and Techniques for Engineering WizardryBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Educational Mismatches May Not Indicate Failed MarketsDokument1 SeiteEducational Mismatches May Not Indicate Failed MarketsRichard Kaven SerquinaNoch keine Bewertungen
- What Do I Expect That This Course Will Be Requiring Until The Finals With The Activity I Have Done TodayDokument1 SeiteWhat Do I Expect That This Course Will Be Requiring Until The Finals With The Activity I Have Done TodayRichard Kaven SerquinaNoch keine Bewertungen
- Our Value PropositionDokument3 SeitenOur Value PropositionRichard Kaven SerquinaNoch keine Bewertungen
- Obstacle Avoidance Robot Using ArduinoDokument5 SeitenObstacle Avoidance Robot Using ArduinoRichard Kaven SerquinaNoch keine Bewertungen
- Hydro Power 1Dokument5 SeitenHydro Power 1Richard Kaven SerquinaNoch keine Bewertungen
- Framework For Philippine Science Teacher EducationDokument72 SeitenFramework For Philippine Science Teacher EducationRex Bryan RanalanNoch keine Bewertungen
- Mechanical Properties For Post PDFDokument40 SeitenMechanical Properties For Post PDFRichard Kaven SerquinaNoch keine Bewertungen
- Hydro Power 1Dokument5 SeitenHydro Power 1Richard Kaven SerquinaNoch keine Bewertungen
- I. Energy Resources II. ContentDokument10 SeitenI. Energy Resources II. ContentRichard Kaven SerquinaNoch keine Bewertungen
- 100W LED Flashlight PDFDokument5 Seiten100W LED Flashlight PDFRichard Kaven SerquinaNoch keine Bewertungen
- Silicon Wafer ProcessingDokument21 SeitenSilicon Wafer ProcessingMani Bharath NutiNoch keine Bewertungen
- Obstacle Avoiding Robot With IR Sensors Without Mi PDFDokument8 SeitenObstacle Avoiding Robot With IR Sensors Without Mi PDFRichard Kaven SerquinaNoch keine Bewertungen
- Biomass Energy Potential in PhilippinesDokument1 SeiteBiomass Energy Potential in PhilippinesRichard Kaven SerquinaNoch keine Bewertungen
- Surface Detection and Avoidance Robot PDFDokument4 SeitenSurface Detection and Avoidance Robot PDFRichard Kaven SerquinaNoch keine Bewertungen
- Serquina Rizal1Dokument2 SeitenSerquina Rizal1Richard Kaven SerquinaNoch keine Bewertungen
- 100W LED Flashlight PDFDokument5 Seiten100W LED Flashlight PDFRichard Kaven SerquinaNoch keine Bewertungen
- RIzalannotation 1Dokument2 SeitenRIzalannotation 1Richard Kaven SerquinaNoch keine Bewertungen
- PCI - OSDev WikiDokument13 SeitenPCI - OSDev Wiki王新海Noch keine Bewertungen
- User-Centred Design: Specialising inDokument7 SeitenUser-Centred Design: Specialising inSagwadi Mastermind MalulekeNoch keine Bewertungen
- Computer ScienceDokument316 SeitenComputer ScienceFSFC7477Noch keine Bewertungen
- Definicion Protecciones LSI-gDokument6 SeitenDefinicion Protecciones LSI-gwladimir RomeroNoch keine Bewertungen
- Srishti Kashyap ResumeDokument1 SeiteSrishti Kashyap ResumeSai Ram BachuNoch keine Bewertungen
- JK 1MD InstructionsDokument12 SeitenJK 1MD InstructionsmendozaNoch keine Bewertungen
- Navigator 9 User ManualDokument444 SeitenNavigator 9 User ManualRommel RushNoch keine Bewertungen
- MIS Case Study - 4 Unraveling The JargonDokument14 SeitenMIS Case Study - 4 Unraveling The JargonAnjali KhannaNoch keine Bewertungen
- Maths PDF 2Dokument140 SeitenMaths PDF 2tharunvara000Noch keine Bewertungen
- Requirement EngineeringDokument17 SeitenRequirement Engineeringhitendra chaudhariNoch keine Bewertungen
- Ebizcom OrganicaDokument5 SeitenEbizcom OrganicacharlesNoch keine Bewertungen
- Modify 24 Pin SMPS To Dell Optilex 8 Pin SMPSDokument4 SeitenModify 24 Pin SMPS To Dell Optilex 8 Pin SMPSsrk_s_raoNoch keine Bewertungen
- Electronics Questions and Answers (Indiabix - Com)Dokument1 SeiteElectronics Questions and Answers (Indiabix - Com)vedhhNoch keine Bewertungen
- My Interview Experience For Standard Chartered Bank GBSDokument2 SeitenMy Interview Experience For Standard Chartered Bank GBSNaveen ChoudharyNoch keine Bewertungen
- RKM Pte RKL enDokument6 SeitenRKM Pte RKL envietnbNoch keine Bewertungen
- Design and Development of SwashplateDokument58 SeitenDesign and Development of SwashplateNsv DineshNoch keine Bewertungen
- Boq Specialist - EOFY20Dokument1 SeiteBoq Specialist - EOFY20Isabela JanuárioNoch keine Bewertungen
- 254 Cascadable and Reconfigurable Photonic Logic GatesDokument15 Seiten254 Cascadable and Reconfigurable Photonic Logic Gatesfsd fsdfdsNoch keine Bewertungen
- Prescribe Command Reference 4.01Dokument393 SeitenPrescribe Command Reference 4.01fygjamNoch keine Bewertungen
- South Android Egstar Operation Guide - Install, Settings, Survey ToolsDokument136 SeitenSouth Android Egstar Operation Guide - Install, Settings, Survey ToolsThiago mendonça rabelloNoch keine Bewertungen
- Bwambale Et Al 2022 Smart Irrigation Monitoring and Control StrategiesDokument12 SeitenBwambale Et Al 2022 Smart Irrigation Monitoring and Control StrategiesLuciano Quezada HenriquezNoch keine Bewertungen
- SWD KeyDokument140 SeitenSWD KeydieuNoch keine Bewertungen
- N265 - List of DocumentsDokument3 SeitenN265 - List of DocumentsCristian CristianNoch keine Bewertungen
- EZ-Scan 6: Magnetic Wheel Linear Axis EncoderDokument2 SeitenEZ-Scan 6: Magnetic Wheel Linear Axis EncoderrubiodegoNoch keine Bewertungen
- AI and Robotics Year 9 Week 1Dokument11 SeitenAI and Robotics Year 9 Week 1Chimezie AnekeNoch keine Bewertungen
- Mark 1: E/L O/C E/L O/CDokument94 SeitenMark 1: E/L O/C E/L O/Cdat phamNoch keine Bewertungen
- Uzair Appraisal Form MarchDokument2 SeitenUzair Appraisal Form MarchUzair AmirNoch keine Bewertungen
- Popcorn Hour C-200 UserGuideDokument121 SeitenPopcorn Hour C-200 UserGuidewarathornNoch keine Bewertungen
- 4.4.1 Digital Input Module 07 DI 93-I 16 Input Channels 24 V DC, Degree of Protection IP67, Electrically Isolated CS31 System Bus ConnectionDokument8 Seiten4.4.1 Digital Input Module 07 DI 93-I 16 Input Channels 24 V DC, Degree of Protection IP67, Electrically Isolated CS31 System Bus ConnectionfathazamNoch keine Bewertungen
- 2011 Hospitality ExamDokument32 Seiten2011 Hospitality ExamEdwin UcheNoch keine Bewertungen