Das könnte Ihnen auch gefallen
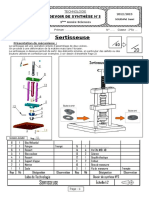
- Devoir+de+Synthèse+N1 2AS 2021 SertisseuseDokument5 SeitenDevoir+de+Synthèse+N1 2AS 2021 SertisseuseGuiliassNoch keine Bewertungen
- Ds1 1as 2022 Fin YoutubeDokument5 SeitenDs1 1as 2022 Fin YoutubeAhmed Aloui100% (1)
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDokument5 SeitenDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliNoch keine Bewertungen
- 07-TD Modelisation Des Liaisons-EDokument5 Seiten07-TD Modelisation Des Liaisons-EMed Aymen BensalemNoch keine Bewertungen
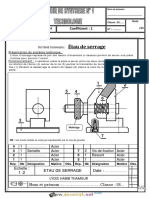
- Bride de SerrageDokument3 SeitenBride de SerrageSalah Dark100% (1)
- Serre TubesDokument4 SeitenSerre TubesBesbes Zied100% (1)
- Enrouleur de RessortDokument3 SeitenEnrouleur de RessortKamel Tayahi100% (4)
- Cours ECS2Dokument350 SeitenCours ECS2Abdellah Mazighi100% (1)
- Devoir de Synthése N3-2AS-2013-FinDokument6 SeitenDevoir de Synthése N3-2AS-2013-FinJay Jay MbayomNoch keine Bewertungen
- Détail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousDokument2 SeitenDétail E Échelle 3:1: APLICATION: Observer Le Dessin D'ensemble de L'étau Et Répondre Aux Questions Ci-DessousGhebouli SamirNoch keine Bewertungen
- Devoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFDokument8 SeitenDevoir de Contrôle N°2 - Technologie Unité de Préparation de Membrane de Pile À Cmbustible - Bac Technique (2011-2012) MR ABDELLATIF HENI PDFabdelbasset11Noch keine Bewertungen
- TD Etau de ModelisteDokument6 SeitenTD Etau de Modelisteattoumii75% (4)
- ds1 1er AnneDokument5 Seitends1 1er AnneTarekMostaphaNoch keine Bewertungen
- Devoir+de+Controle+N1 1AS 2021 Serre Tube Sans+Montage+Dokument4 SeitenDevoir+de+Controle+N1 1AS 2021 Serre Tube Sans+Montage+Hamza Isksioui0% (1)
- Activités - DessinDokument6 SeitenActivités - DessinsoumeyaNoch keine Bewertungen
- SpécialDokument4 SeitenSpécialAbdelmajid Zouaghi100% (1)
- Révision Montage 2ScDokument5 SeitenRévision Montage 2ScMarouen Mekki100% (1)
- L1-PMI - TP 5 Dessin Industriel 2Dokument4 SeitenL1-PMI - TP 5 Dessin Industriel 2Soufa Ane100% (1)
- Correction Devoir+de+Controle+N1 2AS 2021 SertisseuseDokument4 SeitenCorrection Devoir+de+Controle+N1 2AS 2021 SertisseuseGuiliassNoch keine Bewertungen
- DevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Dokument6 SeitenDevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Rabia ZaiedNoch keine Bewertungen
- Devoir de Controle N1-1AS-2021-Serre-TubeDokument6 SeitenDevoir de Controle N1-1AS-2021-Serre-TubeAdam Bensaid100% (1)
- L'optique GéométriqueDokument18 SeitenL'optique GéométriqueZakari Yae100% (1)
- Liaisons Mécanique2019Dokument4 SeitenLiaisons Mécanique2019Mohsen LaabidiNoch keine Bewertungen
- 13 - Cours Cotation Fonctionnelle ET Exercices PDFDokument13 Seiten13 - Cours Cotation Fonctionnelle ET Exercices PDFmasteratsii100% (1)
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDokument6 SeitenDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecNoch keine Bewertungen
- DS1 3 11 12DPMécaDokument4 SeitenDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- Saber DC N1 1S3 2021 2022'Dokument4 SeitenSaber DC N1 1S3 2021 2022'Adam BensaidNoch keine Bewertungen
- Devoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDokument8 SeitenDevoir de Contrôle N°1 - Génie Mécanique - Bac Technique (2011-2012) MR AhmedDhia Cherni100% (1)
- 01 Tour ParalleleDokument7 Seiten01 Tour ParallelekhocineNoch keine Bewertungen
- DC1 1AS Casse Noix NOV 2020Dokument4 SeitenDC1 1AS Casse Noix NOV 2020TarekMostapha50% (2)
- Sujet2 - Bride de SerrageDokument4 SeitenSujet2 - Bride de SerrageMohsen Laabidi100% (3)
- 2019-2020-DSN°2-1ère-Vé RéglableDokument7 Seiten2019-2020-DSN°2-1ère-Vé RéglableAdam BensaidNoch keine Bewertungen
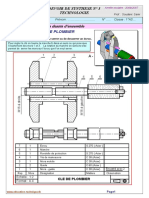
- Devoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFDokument5 SeitenDevoirdesynthesen3 1as 2006 2007 Cle de Plombier PDFMohamed B'nNoch keine Bewertungen
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Dokument4 SeitenDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Razan KhNoch keine Bewertungen
- Bouton Poussoir A3 Annexe 1Dokument1 SeiteBouton Poussoir A3 Annexe 1Youssef Youri100% (1)
- Devoir de Controle N°2Dokument8 SeitenDevoir de Controle N°2yves100% (2)
- Ds1-1as-Vé Reglable en Hauteur-2022Dokument4 SeitenDs1-1as-Vé Reglable en Hauteur-2022Saifeddine BrikiNoch keine Bewertungen
- Devoir de Contrôle N°2 - Technologie - 2ème Sciences (2012-2013) MR Abdallah Raouafi PDFDokument2 SeitenDevoir de Contrôle N°2 - Technologie - 2ème Sciences (2012-2013) MR Abdallah Raouafi PDFchida Oussama100% (1)
- Devoir de Contrôle N°2 - Technologie - PERCEUSE A COLONNES - 2ème Sciences (2015-2016) MR Raouafi - AbdallahDokument3 SeitenDevoir de Contrôle N°2 - Technologie - PERCEUSE A COLONNES - 2ème Sciences (2015-2016) MR Raouafi - AbdallahAmeur AdemeNoch keine Bewertungen
- TD Vis EcrouDokument3 SeitenTD Vis EcrouHoussam HadNoch keine Bewertungen
- DC1 1ére2 2020Dokument3 SeitenDC1 1ére2 2020Mohsen Laabidi100% (2)
- Dc1 1sec2021 p2Dokument4 SeitenDc1 1sec2021 p2Besbes ZiedNoch keine Bewertungen
- AssemblagesDokument7 SeitenAssemblagesAdouni ZakNoch keine Bewertungen
- Le Dessin D'ensemble-EDokument4 SeitenLe Dessin D'ensemble-EMido Si CherniNoch keine Bewertungen
- Cours Cotation FonctionnelleDokument4 SeitenCours Cotation Fonctionnellelou louNoch keine Bewertungen
- Roulement BCDokument6 SeitenRoulement BCOtman OtoNoch keine Bewertungen
- Série de Révision Bac N1 Etude Technologique Part 1Dokument20 SeitenSérie de Révision Bac N1 Etude Technologique Part 1Hamami AymenNoch keine Bewertungen
- Act2 (Tendeur de Courroie) P218-224Dokument7 SeitenAct2 (Tendeur de Courroie) P218-224Fatima Zahra AmalouNoch keine Bewertungen
- Pistolet D Arrosage CorrigeDokument3 SeitenPistolet D Arrosage CorrigeMATOUMBA PAULINNoch keine Bewertungen
- Devoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelDokument4 SeitenDevoir de Contrôle N°2 - Technologie MEULE MANUELLE - 1ère AS (2022-2023) MR KMIMECH AdelAnta diama sambe100% (1)
- TP3 Borne Réglable sujet+MEP PDFDokument8 SeitenTP3 Borne Réglable sujet+MEP PDFdiopNoch keine Bewertungen
- Guidage en TranslationDokument33 SeitenGuidage en TranslationMohamed SaifNoch keine Bewertungen
- Devoir de Synthese N1 1AS 2022 Étau de PerceuseDokument5 SeitenDevoir de Synthese N1 1AS 2022 Étau de PerceuseZied BaccarNoch keine Bewertungen
- DC1 2éme 2020Dokument6 SeitenDC1 2éme 2020Mohsen Laabidi100% (1)
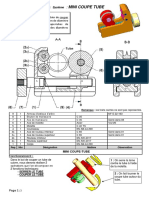
- Devoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelDokument4 SeitenDevoir de Contrôle N°1 - Technologie - Mini-Coupe Tube - 1ère AS (2019-2020) MR KMIMECH AdelHamami Aymen100% (1)
- Devoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiDokument3 SeitenDevoir de Contrôle N°2 - Technologie Mécanisme de Serrage - 2ème Sciences (2013-2014) MR Mighri LotfiRouaissi Ridha0% (1)
- Devoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Dokument6 SeitenDevoir de Synthese N°2 1as Lycee Bir Lahmar Azzabi Moez-2020-2021 - 095211Imed MoussaNoch keine Bewertungen
- Devoir de Contrôle N°2 2013 2014 (Elamri)Dokument4 SeitenDevoir de Contrôle N°2 2013 2014 (Elamri)imed50% (2)
- Enrouleurderessortcorrig 150227132516 Conversion Gate02Dokument5 SeitenEnrouleurderessortcorrig 150227132516 Conversion Gate02Otman OtoNoch keine Bewertungen
- ACFrOgCvT2OKtnO06Mc3NuMbGtf08dDm1 oeXNuA-QJ6nO1L Ilcym0jIKzUTjoyIXf2nemPab8NR2dgrGxoKGatY5ieem88vwi06AuA75K knOC6Mjrhmj15wumyAPWjvbHqz4kAe5qUE2Fhmo0Dokument4 SeitenACFrOgCvT2OKtnO06Mc3NuMbGtf08dDm1 oeXNuA-QJ6nO1L Ilcym0jIKzUTjoyIXf2nemPab8NR2dgrGxoKGatY5ieem88vwi06AuA75K knOC6Mjrhmj15wumyAPWjvbHqz4kAe5qUE2Fhmo0medamine ghoziaNoch keine Bewertungen
- Devoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiDokument7 SeitenDevoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiGhost GhostNoch keine Bewertungen
- Devoir Synthèse N°1 1er 2022Dokument4 SeitenDevoir Synthèse N°1 1er 2022Sofien GesmiNoch keine Bewertungen
- Analyse3 td1Dokument7 SeitenAnalyse3 td1cours importantNoch keine Bewertungen
- Mecanique de FluideDokument26 SeitenMecanique de FluideNarapati NantabogaNoch keine Bewertungen
- Qui Suis-JeDokument2 SeitenQui Suis-JeKilian PaulsNoch keine Bewertungen
- Logarithme NeperienDokument1 SeiteLogarithme Neperienprescytufele28Noch keine Bewertungen
- ch4 Cours Reaction OxydoreductionDokument3 Seitench4 Cours Reaction Oxydoreductionjeanpierreabotsi99Noch keine Bewertungen
- Bases de Donnees PDFDokument627 SeitenBases de Donnees PDFأحمد العابد100% (1)
- Le Package Tcolorbox - Apprendre Le LaTeX / Mohammed JaitiDokument501 SeitenLe Package Tcolorbox - Apprendre Le LaTeX / Mohammed JaitiMohammed Ali Jaiti Souhail100% (2)
- DevoirDokument2 SeitenDevoirHamzaNoch keine Bewertungen
- CITEL 2CP 202012fr PL12-CAT6Dokument1 SeiteCITEL 2CP 202012fr PL12-CAT6Polo CasdenNoch keine Bewertungen
- Mypdf6 PDFDokument14 SeitenMypdf6 PDFEm EttahriNoch keine Bewertungen
- Eval 3 PCT LGL + Corrigé 351Dokument6 SeitenEval 3 PCT LGL + Corrigé 351Flavien TonyNoch keine Bewertungen
- Analyse Du Choix Du ConsommateurDokument39 SeitenAnalyse Du Choix Du ConsommateurhamzaNoch keine Bewertungen
- CHAP 9 Réaction Rédox-DosageDokument3 SeitenCHAP 9 Réaction Rédox-Dosagetoto TOTOROTONoch keine Bewertungen
- Element - 45 - 1091-8.note de Calcul Du Béton ArméDokument132 SeitenElement - 45 - 1091-8.note de Calcul Du Béton ArméJean KouassiNoch keine Bewertungen
- Schema Vecteurs Geometrie 1SDokument2 SeitenSchema Vecteurs Geometrie 1SKhawla WeseletiNoch keine Bewertungen
- Info3 TD1 2020Dokument3 SeitenInfo3 TD1 2020Selma SenioritaNoch keine Bewertungen
- Cahier D'exercicesDokument8 SeitenCahier D'exercicesHayet Ben SaidNoch keine Bewertungen
- TP Thermodynamique Définition D'une Pompe À ChaleurDokument4 SeitenTP Thermodynamique Définition D'une Pompe À ChaleurggNoch keine Bewertungen
- Comment Créer Une Table Des MatièresDokument12 SeitenComment Créer Une Table Des MatièresYann FeutseuNoch keine Bewertungen
- Plan CoursDokument8 SeitenPlan CoursZineddine AlicheNoch keine Bewertungen
- Latihan Soal Time SeriesDokument9 SeitenLatihan Soal Time SeriesAnnisa Suci RamadaniNoch keine Bewertungen
- TD N2 CorrigéDokument4 SeitenTD N2 Corrigémohamed100% (1)
- Cours de Thermo ClassiqueDokument102 SeitenCours de Thermo ClassiqueAmadou CISSENoch keine Bewertungen
- Autocad ArchitectureDokument6 SeitenAutocad ArchitectureSlim FakherNoch keine Bewertungen
- Cap Et Intsru CH2 (Cour Prof)Dokument54 SeitenCap Et Intsru CH2 (Cour Prof)daniel mousdirNoch keine Bewertungen
- Relations D'équivalence, IDokument0 SeitenRelations D'équivalence, IPaul Jeannot0% (1)
- Partie HydrostatiqueDokument3 SeitenPartie HydrostatiquefouadNoch keine Bewertungen