Das könnte Ihnen auch gefallen
- SENSING ELEMENTS REFERENCES AND PROBLEMSDokument6 SeitenSENSING ELEMENTS REFERENCES AND PROBLEMSDionysius Deva Andraresa Kumara100% (1)
- Problem Sheet No 5Dokument2 SeitenProblem Sheet No 5mahad ashfaq33% (3)
- Me I 18 TutorialDokument7 SeitenMe I 18 TutorialArkadebSenguptaNoch keine Bewertungen
- EE 370 Electronic Instrument Assignment 3Dokument1 SeiteEE 370 Electronic Instrument Assignment 3vineet mishraNoch keine Bewertungen
- Eee2210 Analogue Elec II Omae Tie-PrintreadyDokument4 SeitenEee2210 Analogue Elec II Omae Tie-PrintreadyMike ShakespeareNoch keine Bewertungen
- Speed Torque Characteristics of 3 Phase Induction MotorDokument4 SeitenSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanNoch keine Bewertungen
- Experiment 8 Transformer Equivalent CircuitDokument9 SeitenExperiment 8 Transformer Equivalent CircuitBrett GallNoch keine Bewertungen
- Loading Effects and Two-Port Networks Week 5 - 6Dokument31 SeitenLoading Effects and Two-Port Networks Week 5 - 6منتصر الجعبريNoch keine Bewertungen
- Course No. 309 Experiment No.: 2 Name of The Experiment:: Determination of Absolute Capacitance of A CondenserDokument16 SeitenCourse No. 309 Experiment No.: 2 Name of The Experiment:: Determination of Absolute Capacitance of A Condenserafm kollolNoch keine Bewertungen
- EEE 2210-Analogue Electronics II-PrintreadyDokument4 SeitenEEE 2210-Analogue Electronics II-PrintreadyMike ShakespeareNoch keine Bewertungen
- TRANSDUCERS QUIZ ELECTRONICS & INSTRUMENTATION Practice Tests Objective Tests Free Download Many Online Tests Exams For India ExamsDokument9 SeitenTRANSDUCERS QUIZ ELECTRONICS & INSTRUMENTATION Practice Tests Objective Tests Free Download Many Online Tests Exams For India Examshemavathi114071Noch keine Bewertungen
- Second-Order Circuit Theory and RLC ResponsesDokument24 SeitenSecond-Order Circuit Theory and RLC ResponsesKJKSZPJ LXGIWYLNoch keine Bewertungen
- Experiment Name-Study of Phase Shift OscillatorDokument2 SeitenExperiment Name-Study of Phase Shift Oscillatormrana_56100% (2)
- Microcontroller Based Medicine Reminder PDFDokument55 SeitenMicrocontroller Based Medicine Reminder PDFjadhav priti NanaNoch keine Bewertungen
- Lab Activity 2Dokument13 SeitenLab Activity 2Kyle GuarinNoch keine Bewertungen
- 205 S 15 HW 3Dokument2 Seiten205 S 15 HW 3Muhammed AliNoch keine Bewertungen
- First Order Active Filters (LPF, HPF) : (A) Low Pass FilterDokument12 SeitenFirst Order Active Filters (LPF, HPF) : (A) Low Pass FilterVRNoch keine Bewertungen
- Wireless Stepper Motor ControlDokument2 SeitenWireless Stepper Motor ControlHarsha100% (1)
- Sri Jayachamarajendra College of EngineeringDokument13 SeitenSri Jayachamarajendra College of EngineeringFernando Desengkie SangmaNoch keine Bewertungen
- And Reactance of Is Connected To The Generating Station Bus-Bars Through 5 MVA Step-Up Transformer Having ADokument7 SeitenAnd Reactance of Is Connected To The Generating Station Bus-Bars Through 5 MVA Step-Up Transformer Having AJames SantosNoch keine Bewertungen
- Induction Type Instrument - NCDokument7 SeitenInduction Type Instrument - NCNABANITA CHATTERJEENoch keine Bewertungen
- Datasheet sw18010PDokument3 SeitenDatasheet sw18010PmametgonzalesNoch keine Bewertungen
- EE Homework - Partially CompletedDokument8 SeitenEE Homework - Partially CompletedRickNoch keine Bewertungen
- Mwoc Final Lab Manual 28-08-2010Dokument77 SeitenMwoc Final Lab Manual 28-08-2010downloadscribdpdfNoch keine Bewertungen
- 1.1 Gambar Rangkaian Percobaan Dan Langkah Percobaan: Beban V (V) I (A) P (W) Q (Var) S (VA) Cos T S T S T S T S T SDokument10 Seiten1.1 Gambar Rangkaian Percobaan Dan Langkah Percobaan: Beban V (V) I (A) P (W) Q (Var) S (VA) Cos T S T S T S T S T Smas madNoch keine Bewertungen
- BJT Single Stage CE AmplifierDokument10 SeitenBJT Single Stage CE AmplifierVăn Công100% (1)
- Design of Two Stage Compensated Cmos Opamp-1Dokument3 SeitenDesign of Two Stage Compensated Cmos Opamp-1Varun AroraNoch keine Bewertungen
- Torque - Slip Characteristic of A Three - Phase Induction MachineDokument28 SeitenTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNoch keine Bewertungen
- 8086 Pin DiagramDokument18 Seiten8086 Pin DiagramAkash MittalNoch keine Bewertungen
- R2KY Avalanche Diode under 40 charactersDokument2 SeitenR2KY Avalanche Diode under 40 charactersAlejandro Eri AlejandrooNoch keine Bewertungen
- Double Tuned FiltersDokument4 SeitenDouble Tuned FiltersmanosNoch keine Bewertungen
- GEE338 Problem Set #4 Compensators and PID PDFDokument3 SeitenGEE338 Problem Set #4 Compensators and PID PDFAkram KhorsheidNoch keine Bewertungen
- Universal Power Supply (Dc/Ac) With Function Generator: Lucas Nülle GMBH Page 1/1 WWW - Lucas-Nuelle - UsDokument1 SeiteUniversal Power Supply (Dc/Ac) With Function Generator: Lucas Nülle GMBH Page 1/1 WWW - Lucas-Nuelle - Usabbas ahmedNoch keine Bewertungen
- EEM328 Electronics Laboratory - Report4 - BJT BiasingDokument4 SeitenEEM328 Electronics Laboratory - Report4 - BJT Biasingdonatello84Noch keine Bewertungen
- Sinusoidal AC Voltage Characteristics DefinitionsDokument9 SeitenSinusoidal AC Voltage Characteristics Definitionsangelo dedicatoriaNoch keine Bewertungen
- Schneider Push Buttons and Pilot LightsDokument4 SeitenSchneider Push Buttons and Pilot Lightsshamimahmed313Noch keine Bewertungen
- Realization of a Simple AND-OR Circuit and Propagation Delay StudyDokument6 SeitenRealization of a Simple AND-OR Circuit and Propagation Delay StudyJoanne Lai100% (1)
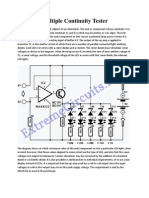
- Multiple Continuity TesterDokument18 SeitenMultiple Continuity TesterbnurkholisNoch keine Bewertungen
- Optical Network SolDokument85 SeitenOptical Network SolJohn Erhinyo50% (2)
- Classification and Function of RelaysDokument7 SeitenClassification and Function of RelaysVasu BagganNoch keine Bewertungen
- Models - Plasma.drift Diffusion TutorialDokument14 SeitenModels - Plasma.drift Diffusion TutorialbkmmizanNoch keine Bewertungen
- Presentation On A Variable Audio Frequency Oscillator Using Op-Amp 741Dokument13 SeitenPresentation On A Variable Audio Frequency Oscillator Using Op-Amp 741Moriyom MouNoch keine Bewertungen
- MD Singh Power Electronics Solution Manual To Chapter 11Dokument6 SeitenMD Singh Power Electronics Solution Manual To Chapter 11Anoop Mathew100% (3)
- ch12 PDFDokument66 Seitench12 PDFSurekha Pravin AlshiNoch keine Bewertungen
- Determination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitDokument4 SeitenDetermination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitMd Rion100% (1)
- EE 332 Lab 3Dokument10 SeitenEE 332 Lab 3Nguyễn Văn ThiệnNoch keine Bewertungen
- (379315304) 151221525-Deber-2Dokument19 Seiten(379315304) 151221525-Deber-2Daniel Armas100% (3)
- Asynchronous Machines Tutorial Sheets (EL-208Dokument10 SeitenAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNoch keine Bewertungen
- Integrated gate-commutated thyristor device descriptionDokument3 SeitenIntegrated gate-commutated thyristor device descriptionKishore CkNoch keine Bewertungen
- EEE 311 Lab Report 3Dokument16 SeitenEEE 311 Lab Report 3Anik Saha Toni 1912619643Noch keine Bewertungen
- Lecs 2 After MidtermDokument41 SeitenLecs 2 After MidtermAbdalkader Alibrahim100% (1)
- What Is Sequence and Logic Control?Dokument6 SeitenWhat Is Sequence and Logic Control?Marwan ShamsNoch keine Bewertungen
- Assignment2 Es451 MobsDokument2 SeitenAssignment2 Es451 MobsHaris KhanNoch keine Bewertungen
- EI 8352 TR - Nov 17Dokument2 SeitenEI 8352 TR - Nov 17Anonymous yO7rcec6vuNoch keine Bewertungen
- Sensor Encoder PDFDokument10 SeitenSensor Encoder PDFDaniel SuarezNoch keine Bewertungen
- Shadow AlarmDokument23 SeitenShadow AlarmAlok PawarNoch keine Bewertungen
- Analog and Digital VLSI Design Analog AssignmentDokument12 SeitenAnalog and Digital VLSI Design Analog AssignmentAdrian ChaseNoch keine Bewertungen
- S4 5Dokument12 SeitenS4 5Fabian CaizaNoch keine Bewertungen
- Assignment 1Dokument4 SeitenAssignment 1Vivek KumarNoch keine Bewertungen
- Project D1 - Ship Stability, Brem PavloDokument9 SeitenProject D1 - Ship Stability, Brem PavloПавел БремNoch keine Bewertungen
- MUESCO-STM 214 - Practice Exercise - Work, Power, and EnergyDokument5 SeitenMUESCO-STM 214 - Practice Exercise - Work, Power, and EnergyT-Swiftie MuescoNoch keine Bewertungen
- Steady State Temperature Profiles in Rods PaperDokument20 SeitenSteady State Temperature Profiles in Rods PapergizatowerNoch keine Bewertungen
- Gen. Physics 2 USLeM Week 1 Version 4Dokument10 SeitenGen. Physics 2 USLeM Week 1 Version 4xibol14985Noch keine Bewertungen
- Activity 1:: Faraday's Law of Electromagnetic Induction and Lenz's LawDokument2 SeitenActivity 1:: Faraday's Law of Electromagnetic Induction and Lenz's LawChristina BiniamNoch keine Bewertungen
- Lab Report - Lab 1 - Thermistor Temperature CoefficientDokument22 SeitenLab Report - Lab 1 - Thermistor Temperature CoefficientBrian Hallee50% (4)
- Cell Phone Detector: Bachelor of Technology IN Mechanical EngineeringDokument5 SeitenCell Phone Detector: Bachelor of Technology IN Mechanical EngineeringErole Technologies Pvt ltd Homemade EngineerNoch keine Bewertungen
- Alarm System ReportDokument29 SeitenAlarm System Reportsyafikahl100% (2)
- Engineering Chemistry Important QuestionsDokument5 SeitenEngineering Chemistry Important QuestionsKaran KatamNoch keine Bewertungen
- Repair and Reinforcement of Historic Timber Structures With Stainless Steel-A ReviewDokument23 SeitenRepair and Reinforcement of Historic Timber Structures With Stainless Steel-A ReviewAtluri PrasannaNoch keine Bewertungen
- TeSys GV4 - GV4P115SDokument10 SeitenTeSys GV4 - GV4P115SDicky EkaNoch keine Bewertungen
- 5054 s20 Ms 21 PDFDokument11 Seiten5054 s20 Ms 21 PDFJack KowmanNoch keine Bewertungen
- Im-7 Unit CoolerDokument108 SeitenIm-7 Unit CoolerstefanNoch keine Bewertungen
- Ohta, Goto, Empirical Shear Wave Velocity Equations in Terms of Characteristic Soil IndexesDokument21 SeitenOhta, Goto, Empirical Shear Wave Velocity Equations in Terms of Characteristic Soil IndexesAngelica MartinezNoch keine Bewertungen
- PADHMASREE.P XII-A Physics Project 2023-24Dokument14 SeitenPADHMASREE.P XII-A Physics Project 2023-24punni1978Noch keine Bewertungen
- Science Notes - Lession-5 - Periodic Clasification of Elements - ChemistryDokument14 SeitenScience Notes - Lession-5 - Periodic Clasification of Elements - ChemistryHimanshi guptaNoch keine Bewertungen
- Arki Quiz - 1ST WeekDokument3 SeitenArki Quiz - 1ST WeekGrendelle BasaNoch keine Bewertungen
- Matrix Structural Analysis and Dynamics Theory and Computation PAZDokument505 SeitenMatrix Structural Analysis and Dynamics Theory and Computation PAZJorge VarelaNoch keine Bewertungen
- Half Cell Mono PERC: DAS-WH144P6 435W 455WDokument2 SeitenHalf Cell Mono PERC: DAS-WH144P6 435W 455WMalinaNoch keine Bewertungen
- FLOW-3D CAST Lost Foam CastingDokument2 SeitenFLOW-3D CAST Lost Foam Castingfantasy373Noch keine Bewertungen
- Time Mark 471 Multi Stage AlternatorDokument2 SeitenTime Mark 471 Multi Stage AlternatorAladino SanchezNoch keine Bewertungen
- ''Smoothness of Maybach Dog Clutch Shift in The Automotive Gearbox''Dokument11 Seiten''Smoothness of Maybach Dog Clutch Shift in The Automotive Gearbox''thisisjineshNoch keine Bewertungen
- Growatt SPH3000-6000 Inverters: 2 MPPT, IP65, Programmable ModesDokument2 SeitenGrowatt SPH3000-6000 Inverters: 2 MPPT, IP65, Programmable ModesUnai Cuenca GutiérrezNoch keine Bewertungen
- Ivan Antić-Samadhi-Unity of Consciousness and ExistenceDokument141 SeitenIvan Antić-Samadhi-Unity of Consciousness and ExistenceDanijel Bajić100% (1)
- 22 - BT - TT - Mid Exam Aug 2021Dokument2 Seiten22 - BT - TT - Mid Exam Aug 2021Pavan RsNoch keine Bewertungen
- Solidworks FEA TheoryDokument6 SeitenSolidworks FEA TheoryMelvin LolosNoch keine Bewertungen
- IntelligAIRE II Diagnostic Procedures Using Drivers Display ModuleDokument2 SeitenIntelligAIRE II Diagnostic Procedures Using Drivers Display ModuleNino PamindoNoch keine Bewertungen
- MartinelliLuce Catalogo 2015Dokument33 SeitenMartinelliLuce Catalogo 2015sara barataNoch keine Bewertungen
- LEDs - Light Emitting DiodesDokument21 SeitenLEDs - Light Emitting DiodesFırat YılmazNoch keine Bewertungen
- Basic Ideas in ChemistryDokument16 SeitenBasic Ideas in ChemistryLucianaAcostaNoch keine Bewertungen