Das könnte Ihnen auch gefallen
- (L. S. Srinath) Advanced Mechanics of Solids 3Dokument521 Seiten(L. S. Srinath) Advanced Mechanics of Solids 3Chitrang Bohra92% (26)
- Huawei Final Written ExamDokument18 SeitenHuawei Final Written ExamJonafe Piamonte50% (2)
- Problem Statement (Tableau - Graded Project)Dokument2 SeitenProblem Statement (Tableau - Graded Project)Kaustav De0% (1)
- Case Interviews CrackedDokument208 SeitenCase Interviews CrackedSaurabhYadav100% (11)
- Case Interviews CrackedDokument208 SeitenCase Interviews CrackedSaurabhYadav100% (11)
- CNN ExamplesDokument2 SeitenCNN ExamplesCarmen PoparascuNoch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
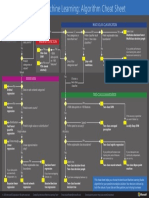
- Microsoft Machine Learning Algorithm Cheat Sheet v2 PDFDokument1 SeiteMicrosoft Machine Learning Algorithm Cheat Sheet v2 PDFamitag007100% (1)
- Indian Institute of Technology (BHU), Varanasi: B.Tech. Project Final ReportDokument9 SeitenIndian Institute of Technology (BHU), Varanasi: B.Tech. Project Final ReportEncore GamingNoch keine Bewertungen
- Segmentation and Classification of CT Renal Images Using Deep NetworksDokument8 SeitenSegmentation and Classification of CT Renal Images Using Deep NetworksraghunaathNoch keine Bewertungen
- 1-s2.0-S2666522022000065-mainDokument13 Seiten1-s2.0-S2666522022000065-mainamrusankar4Noch keine Bewertungen
- Brain Image Classification Using Learning Machine Approach and Brain Structure AnalysisDokument7 SeitenBrain Image Classification Using Learning Machine Approach and Brain Structure AnalysisAhmed ElmasryNoch keine Bewertungen
- J Neucom 2019 05 052Dokument38 SeitenJ Neucom 2019 05 052mohammad ghamsariNoch keine Bewertungen
- All-Optical Machine Learning Using Diffractive Deep Neural NetworksDokument9 SeitenAll-Optical Machine Learning Using Diffractive Deep Neural NetworksDjamshid DamryNoch keine Bewertungen
- 2018 - A Convolutional Neural Network Based On A Capsule Network WithDokument27 Seiten2018 - A Convolutional Neural Network Based On A Capsule Network WithjoseNoch keine Bewertungen
- Expert system classifies MRI brain images with hybrid methodDokument5 SeitenExpert system classifies MRI brain images with hybrid methodpavithrNoch keine Bewertungen
- CNN Architecture Detects Signals Using Filter BankDokument15 SeitenCNN Architecture Detects Signals Using Filter BankLicence Spécialisée Idbd EnsakNoch keine Bewertungen
- TS PPT (Autosaved)Dokument16 SeitenTS PPT (Autosaved)Vasiha Fathima RNoch keine Bewertungen
- Brain Region Segmentation Using Convolutional Neural NetworkDokument6 SeitenBrain Region Segmentation Using Convolutional Neural NetworkSAI CHAKRADHAR GNoch keine Bewertungen
- Data Mining Techniques in Coginitive Radio Network For Smart Home EnvironmentDokument7 SeitenData Mining Techniques in Coginitive Radio Network For Smart Home Environmentdr mbaluNoch keine Bewertungen
- Espectral CannonDokument8 SeitenEspectral Cannonsamuel salinas pezoaNoch keine Bewertungen
- Weihui Zeng_Miao Li_2020_Crop Leaf Disease Recognition Based on Self-Attention Convolutional NeuralDokument7 SeitenWeihui Zeng_Miao Li_2020_Crop Leaf Disease Recognition Based on Self-Attention Convolutional Neuralbigliang98Noch keine Bewertungen
- Convolutional Neural Network Based Retinal Vessel SegmentationDokument10 SeitenConvolutional Neural Network Based Retinal Vessel SegmentationcseijNoch keine Bewertungen
- Febrianto 2020 IOP Conf. Ser. Mater. Sci. Eng. 771 012031Dokument7 SeitenFebrianto 2020 IOP Conf. Ser. Mater. Sci. Eng. 771 012031Asma ChikhaouiNoch keine Bewertungen
- Deep Learning in Automated Ecg Noise DetectionDokument22 SeitenDeep Learning in Automated Ecg Noise DetectionmpoornishwarNoch keine Bewertungen
- A Comparative Study of Tuberculosis DetectionDokument5 SeitenA Comparative Study of Tuberculosis DetectionMehera Binte MizanNoch keine Bewertungen
- On Line Emotion Detection Using Retrainable Deep Neural NetworksDokument8 SeitenOn Line Emotion Detection Using Retrainable Deep Neural NetworksAbdullah ShabbirNoch keine Bewertungen
- Medical Image Fusion Using Deep Learning MechanismDokument11 SeitenMedical Image Fusion Using Deep Learning MechanismIJRASETPublicationsNoch keine Bewertungen
- Improved Fault Diagnosis in Wireless Sensor Networks Using Deep Learning TechniqueDokument4 SeitenImproved Fault Diagnosis in Wireless Sensor Networks Using Deep Learning TechniqueKeerthi GuruNoch keine Bewertungen
- Anatomy-Specific Classification of Medical Images Using Deep Convolutional NetsDokument4 SeitenAnatomy-Specific Classification of Medical Images Using Deep Convolutional NetsSiva SreeramdasNoch keine Bewertungen
- 2022 - YANG - A Novel Intelligent Fault Diagnosis Method of Rolling Bearings...Dokument11 Seiten2022 - YANG - A Novel Intelligent Fault Diagnosis Method of Rolling Bearings...igorbassoNoch keine Bewertungen
- Applying Gradient Descent in Convolutional Neural NetworksDokument9 SeitenApplying Gradient Descent in Convolutional Neural NetworksRest TabernacleNoch keine Bewertungen
- 1 s2.0 S0263224120302050 MainDokument12 Seiten1 s2.0 S0263224120302050 MainCristian BastiasNoch keine Bewertungen
- Motor Imagery ClassificationDokument18 SeitenMotor Imagery ClassificationAtharva dubeyNoch keine Bewertungen
- An Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural NetworkDokument2 SeitenAn Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural Networksriblue7Noch keine Bewertungen
- Back Propagation Neural NetworkDokument10 SeitenBack Propagation Neural NetworkAhmad Bisyrul HafiNoch keine Bewertungen
- Peer Reviewed JournalsDokument7 SeitenPeer Reviewed JournalsSai ReddyNoch keine Bewertungen
- A Survey On Pest Detectionand Pesticide Recommendationusing CNN AlgorithmDokument5 SeitenA Survey On Pest Detectionand Pesticide Recommendationusing CNN AlgorithmIJRASETPublicationsNoch keine Bewertungen
- Accepted Manuscript: Journal of Neuroscience MethodsDokument13 SeitenAccepted Manuscript: Journal of Neuroscience MethodsChrisilla SNoch keine Bewertungen
- A Deep Learning Convolutional Neural Network in Health Care EnvironmentDokument17 SeitenA Deep Learning Convolutional Neural Network in Health Care EnvironmentVasiha Fathima RNoch keine Bewertungen
- Fetal Ultrasound Image Segmentation For Measuring BiometricDokument4 SeitenFetal Ultrasound Image Segmentation For Measuring BiometricspirotessNoch keine Bewertungen
- Time Domain Structural Health Monitoring With Magnetostrictive Patches Using Five Stage Hierarchical Neural NetworksDokument7 SeitenTime Domain Structural Health Monitoring With Magnetostrictive Patches Using Five Stage Hierarchical Neural NetworksDebiprasad GhoshNoch keine Bewertungen
- First PaperDokument4 SeitenFirst Paperachaparala4499Noch keine Bewertungen
- 1.convolutional Neural Networks For Image ClassificationDokument11 Seiten1.convolutional Neural Networks For Image ClassificationMuhammad ShoaibNoch keine Bewertungen
- Convolutional Neural Network With Data Augmentation For SAR Target RecognitionDokument5 SeitenConvolutional Neural Network With Data Augmentation For SAR Target RecognitionS M RizviNoch keine Bewertungen
- Article 1Dokument4 SeitenArticle 1Tashu SardaNoch keine Bewertungen
- Feature Fusion Based On Convolutional Neural Netwo PDFDokument8 SeitenFeature Fusion Based On Convolutional Neural Netwo PDFNguyễn Thành TânNoch keine Bewertungen
- Scalogram Neural Network Activations With Machine Learning For Domestic Multi-Channel Audio ClassificationDokument6 SeitenScalogram Neural Network Activations With Machine Learning For Domestic Multi-Channel Audio ClassificationRizki Jumadil PutraNoch keine Bewertungen
- Efficacy of Algorithms in Deep Learning On Brain Tumor Cancer Detection (Topic Area Deep Learning)Dokument8 SeitenEfficacy of Algorithms in Deep Learning On Brain Tumor Cancer Detection (Topic Area Deep Learning)International Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Deep Learning 3D Convolutional Neural Networks For Predicting Alzheimer's Disease (ALD)Dokument12 SeitenDeep Learning 3D Convolutional Neural Networks For Predicting Alzheimer's Disease (ALD)Wided HechkelNoch keine Bewertungen
- Applied Sciences: A Semi-Supervised Fault Diagnosis Method Based On Improved Bidirectional Generative Adversarial NetworkDokument21 SeitenApplied Sciences: A Semi-Supervised Fault Diagnosis Method Based On Improved Bidirectional Generative Adversarial NetworkABDULHAMID.M MOUSANoch keine Bewertungen
- A Time-Delay Neural Networks Architecture For Structural Damage DetectionDokument5 SeitenA Time-Delay Neural Networks Architecture For Structural Damage DetectionJain DeepakNoch keine Bewertungen
- Soft Computing Assignments Using Neural NetworksDokument13 SeitenSoft Computing Assignments Using Neural NetworksAkshit Singla100% (1)
- 1 s2.0 S0031320322007075 MainDokument12 Seiten1 s2.0 S0031320322007075 MainWidi KazamiNoch keine Bewertungen
- CH01Dokument12 SeitenCH01Latta SakthyyNoch keine Bewertungen
- CNN and RNN Comparative Study For Intrusion Detection SystemDokument12 SeitenCNN and RNN Comparative Study For Intrusion Detection SystemIshika ChokshiNoch keine Bewertungen
- A Novel Statistical Fusion Rule For Image Fusion and Its Comparison in Non Subsampled Contourlet Transform Domain and Wavelet DomainDokument19 SeitenA Novel Statistical Fusion Rule For Image Fusion and Its Comparison in Non Subsampled Contourlet Transform Domain and Wavelet DomainIJMAJournalNoch keine Bewertungen
- Classification and Segmentation of Plants Using Adam Optimization Based On Deep Neural NetworksDokument26 SeitenClassification and Segmentation of Plants Using Adam Optimization Based On Deep Neural NetworksmanikantaNoch keine Bewertungen
- Expert system diagnoses engine faults using intake pressure signals and neural networksDokument9 SeitenExpert system diagnoses engine faults using intake pressure signals and neural networksJean Carlos PinedaNoch keine Bewertungen
- Condition Monitoring of A Turbine Using Echo State Neural NetworkDokument9 SeitenCondition Monitoring of A Turbine Using Echo State Neural Networkpurushothaman sinivasanNoch keine Bewertungen
- MINOR_SEM_6[1]Dokument18 SeitenMINOR_SEM_6[1]स्वराज कुमारNoch keine Bewertungen
- Convolutional Neural Networks: An Overview and Application in RadiologyDokument20 SeitenConvolutional Neural Networks: An Overview and Application in RadiologyAnnNoch keine Bewertungen
- Deep AEDokument53 SeitenDeep AEashikurrahman29012000Noch keine Bewertungen
- Classification of Power Quality Disturbances Using Dual Wavelet Transforms and SVMDokument6 SeitenClassification of Power Quality Disturbances Using Dual Wavelet Transforms and SVMMalu MohanNoch keine Bewertungen
- Final Idea Presentation in ConvolutionDokument7 SeitenFinal Idea Presentation in ConvolutionKishan KumarNoch keine Bewertungen
- CNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GDokument10 SeitenCNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GTJPRC PublicationsNoch keine Bewertungen
- Mahamana Ka Krititatva - Hi.enDokument2 SeitenMahamana Ka Krititatva - Hi.enKaustav DeNoch keine Bewertungen
- Recommendation Letter 2018Dokument1 SeiteRecommendation Letter 2018Kaustav DeNoch keine Bewertungen
- ReadmerDokument79 SeitenReadmersatyajtiNoch keine Bewertungen
- Graded Quiz - SAS (Week 4) - Data Analysis Using SAS - Great LearningDokument6 SeitenGraded Quiz - SAS (Week 4) - Data Analysis Using SAS - Great LearningKaustav DeNoch keine Bewertungen
- External Flows: Dr. Om Prakash Singh Asst. Prof., IIT MandiDokument37 SeitenExternal Flows: Dr. Om Prakash Singh Asst. Prof., IIT MandiKaustav DeNoch keine Bewertungen
- Aimcat 1801Dokument44 SeitenAimcat 1801Johnny Cat Parttwo0% (1)
- Problem Statement - Graded Project: Variable DetailsDokument3 SeitenProblem Statement - Graded Project: Variable DetailsKaustav De0% (1)
- Problem Statement - Ensemble TechniqueDokument2 SeitenProblem Statement - Ensemble TechniqueKaustav DeNoch keine Bewertungen
- ReadmerDokument79 SeitenReadmersatyajtiNoch keine Bewertungen
- 4 Conversion of Tool Angles From One System To AnotherDokument16 Seiten4 Conversion of Tool Angles From One System To AnotherPRASAD326100% (4)
- ANALYSIS OF STRESSES (Assignment#1)Dokument4 SeitenANALYSIS OF STRESSES (Assignment#1)jowasa92050% (2)
- External Flows: Dr. Om Prakash Singh Asst. Prof., IIT MandiDokument37 SeitenExternal Flows: Dr. Om Prakash Singh Asst. Prof., IIT MandiKaustav DeNoch keine Bewertungen
- Som PDFDokument42 SeitenSom PDFKaustav DeNoch keine Bewertungen
- Som PDFDokument42 SeitenSom PDFKaustav DeNoch keine Bewertungen
- Dimension Alalysis AssingmentDokument5 SeitenDimension Alalysis AssingmentKaustav DeNoch keine Bewertungen
- ANALYSIS OF STRESSES (Assignment#1)Dokument4 SeitenANALYSIS OF STRESSES (Assignment#1)jowasa92050% (2)
- ANALYSIS OF STRESSES (Assignment#1)Dokument4 SeitenANALYSIS OF STRESSES (Assignment#1)jowasa92050% (2)
- Import As Import As From ImportDokument23 SeitenImport As Import As From ImportKaustav DeNoch keine Bewertungen
- Online Course Reg 7th SemDokument1 SeiteOnline Course Reg 7th SemKaustav DeNoch keine Bewertungen
- Kaustav de - Res19Dokument2 SeitenKaustav de - Res19Kaustav DeNoch keine Bewertungen
- Indian Companies Hiring During Covid-19 PDFDokument116 SeitenIndian Companies Hiring During Covid-19 PDFshrijit “shri” tembheharNoch keine Bewertungen
- Hey Hey BeyDokument1 SeiteHey Hey BeyKaustav DeNoch keine Bewertungen
- Assignment-4: Course Code: BM-515Dokument2 SeitenAssignment-4: Course Code: BM-515Kaustav DeNoch keine Bewertungen
- SBI e-Receipt for Academic Fee PaymentDokument2 SeitenSBI e-Receipt for Academic Fee PaymentKaustav DeNoch keine Bewertungen
- Dcs Assignment I - A1 Digital AssinmentDokument2 SeitenDcs Assignment I - A1 Digital AssinmentYash GuptaNoch keine Bewertungen
- DIPLABMANUALDokument11 SeitenDIPLABMANUALKapil KumarNoch keine Bewertungen
- Module 06. String Algorithms Lecture 3-6Dokument48 SeitenModule 06. String Algorithms Lecture 3-6Clash Of ClanesNoch keine Bewertungen
- Ai 56Dokument7 SeitenAi 56Arpit TyagiNoch keine Bewertungen
- IT5409 Ch3 Filters 20200228 v3 Part2Dokument27 SeitenIT5409 Ch3 Filters 20200228 v3 Part2Minh Nguyễn Quốc NhậtNoch keine Bewertungen
- 1 KF750 Over 1 KF755 Kf750 DSP Settings: Input LFDokument5 Seiten1 KF750 Over 1 KF755 Kf750 DSP Settings: Input LFOmarNoch keine Bewertungen
- Lesson 4 Gradient DescentDokument13 SeitenLesson 4 Gradient DescentJohn Veksler LingalNoch keine Bewertungen
- Knapsack Problem CourseraDokument3 SeitenKnapsack Problem CourseraAditya JhaNoch keine Bewertungen
- Mesh Free GRLIUDokument42 SeitenMesh Free GRLIUSandeepNoch keine Bewertungen
- Fibonacci HeapsDokument21 SeitenFibonacci Heapsmanishbhardwaj8131Noch keine Bewertungen
- Attempts Q34MidtermsDokument8 SeitenAttempts Q34MidtermsJitlee PapaNoch keine Bewertungen
- Viva QuestionsDokument13 SeitenViva QuestionsSwathi KoteshwarNoch keine Bewertungen
- Boundary Value Problems: Second Order BVPDokument4 SeitenBoundary Value Problems: Second Order BVPmakfirsefaNoch keine Bewertungen
- Amm Godwin 2014Dokument8 SeitenAmm Godwin 2014usaravanakumarNoch keine Bewertungen
- Quadratic Equation ProgramDokument2 SeitenQuadratic Equation ProgramnimcanNoch keine Bewertungen
- The Graphical MethodDokument4 SeitenThe Graphical MethodJelay Quilatan100% (1)
- Digital Image Properties: Steps of Image ProcessingDokument15 SeitenDigital Image Properties: Steps of Image Processingكرميلا عليNoch keine Bewertungen
- Upsampling and DownsamplingDokument8 SeitenUpsampling and DownsamplingAmit PrajapatiNoch keine Bewertungen
- CEBALLOS Lab Activity SolutionsDokument4 SeitenCEBALLOS Lab Activity Solutionsjames ceballosNoch keine Bewertungen
- Lecture HW 04 RootsDokument12 SeitenLecture HW 04 RootssmashthecommienwoNoch keine Bewertungen
- Adaline/MadalineDokument38 SeitenAdaline/MadalineRoots999100% (8)
- MAth Expression Vs Math EquationDokument1 SeiteMAth Expression Vs Math EquationHero MirasolNoch keine Bewertungen
- FeedCon (Unit 4)Dokument32 SeitenFeedCon (Unit 4)Dovie MayNoch keine Bewertungen
- CB19241-Data Structures and Algorithms-SyllabusDokument1 SeiteCB19241-Data Structures and Algorithms-SyllabusbhuvangatesNoch keine Bewertungen
- 01-Time and Space ComplexityDokument41 Seiten01-Time and Space ComplexityBhuvaneswaran BNoch keine Bewertungen
- Report On Finding The Traffic Flow in The Net of One-Way StreetsDokument11 SeitenReport On Finding The Traffic Flow in The Net of One-Way StreetsArindam MondalNoch keine Bewertungen
- Midterm Exam KeyDokument6 SeitenMidterm Exam KeybkayceeNoch keine Bewertungen


























































![MINOR_SEM_6[1]](https://imgv2-2-f.scribdassets.com/img/document/723872819/149x198/d1a901bf10/1713341227?v=1)