Das könnte Ihnen auch gefallen
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryVon EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNoch keine Bewertungen
- Sensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsDokument26 SeitenSensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsTamal ChakrabortyNoch keine Bewertungen
- Collective Traffic ForecastingDokument15 SeitenCollective Traffic ForecastingnaufraghiNoch keine Bewertungen
- BiLSTM LSTMDokument11 SeitenBiLSTM LSTMRONY ARTURO BOCANGEL SALASNoch keine Bewertungen
- ART07Dokument10 SeitenART07Zayani GhaithNoch keine Bewertungen
- Machine Learning-MothennaDokument25 SeitenMachine Learning-MothennaharithNoch keine Bewertungen
- Research Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsDokument14 SeitenResearch Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsVishalBeheraNoch keine Bewertungen
- Traffic Flow Prediction Using Deep Learning TechniquesDokument18 SeitenTraffic Flow Prediction Using Deep Learning Techniquessubh.goswami6537Noch keine Bewertungen
- Exploring Spatial-Temporal Relations Via Deep Convolutional NeuralDokument10 SeitenExploring Spatial-Temporal Relations Via Deep Convolutional Neuralhoang anhNoch keine Bewertungen
- One Column IEEE Journal ArticleDokument10 SeitenOne Column IEEE Journal ArticleKrishna GautamNoch keine Bewertungen
- A Capacity-Restraint Transit Assignment Model When A Predetermination Method Indicates The Invalidity of Time IndependenceDokument22 SeitenA Capacity-Restraint Transit Assignment Model When A Predetermination Method Indicates The Invalidity of Time IndependencePratik JhaNoch keine Bewertungen
- Attention Based Spatial-Temporal Graph Convolutional Networks For Traffic Flow ForecastingDokument8 SeitenAttention Based Spatial-Temporal Graph Convolutional Networks For Traffic Flow ForecastingVarun Krishna PsNoch keine Bewertungen
- Traffic Flow Forecasting Using Multivariate Time-Series Deep Learning and Distributed ComputingDokument7 SeitenTraffic Flow Forecasting Using Multivariate Time-Series Deep Learning and Distributed ComputingBasketball Hight LightNoch keine Bewertungen
- Symmetry: On The Urban Link Fundamental Diagram Based On Velocity-Weighted Flow and Queue LengthDokument17 SeitenSymmetry: On The Urban Link Fundamental Diagram Based On Velocity-Weighted Flow and Queue LengthPrarth KNoch keine Bewertungen
- Dynamic System-Optimal Traffic Assignment Using A State Space Model'Dokument22 SeitenDynamic System-Optimal Traffic Assignment Using A State Space Model'wendersoncsdepNoch keine Bewertungen
- Time and Space Discretization in Dynamic Traffic Assignment ModelsDokument10 SeitenTime and Space Discretization in Dynamic Traffic Assignment Modelsguido gentileNoch keine Bewertungen
- Lu 2019 LeveragingGraphNeuralNetworkwithLSTMForTrafDokument9 SeitenLu 2019 LeveragingGraphNeuralNetworkwithLSTMForTrafBinuri Yeshani RaigamkoraleNoch keine Bewertungen
- Long-Term Travel Demand Forecasting in General Dynamic Transportation NetworksDokument20 SeitenLong-Term Travel Demand Forecasting in General Dynamic Transportation NetworksRufa mae BascompteNoch keine Bewertungen
- Mobile Traffic Prediction From Raw DataDokument6 SeitenMobile Traffic Prediction From Raw DataJJ LópezNoch keine Bewertungen
- System Optimal Time - Dependent PathDokument10 SeitenSystem Optimal Time - Dependent PathShangbo WangNoch keine Bewertungen
- Spillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying BottlenecksDokument53 SeitenSpillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying Bottlenecksguido gentileNoch keine Bewertungen
- 42 Firb (EWGT2006)Dokument15 Seiten42 Firb (EWGT2006)guido gentileNoch keine Bewertungen
- A Fastest Route Planning For LBS Based On Traffic PredictionDokument6 SeitenA Fastest Route Planning For LBS Based On Traffic Predictionaku_bdgNoch keine Bewertungen
- Research On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaDokument15 SeitenResearch On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaNiña Criselle PasiaNoch keine Bewertungen
- Dynamic Travel Time Prediction ModelsDokument14 SeitenDynamic Travel Time Prediction Modelscristian_master100% (1)
- Time Series Models For Internet Data Traffic: Chun You and Kavitha ChandraDokument8 SeitenTime Series Models For Internet Data Traffic: Chun You and Kavitha Chandraعمار طعمةNoch keine Bewertungen
- Traffic Prediction For Intelligent Transportation Systems Using Machine LearningDokument28 SeitenTraffic Prediction For Intelligent Transportation Systems Using Machine LearningRohit RajNoch keine Bewertungen
- DiCesare1994 Chapter TheApplicationOfPetriNetsToTheDokument14 SeitenDiCesare1994 Chapter TheApplicationOfPetriNetsToThechongqi heNoch keine Bewertungen
- A Dynamic Traffic Assignment Method For Planning and Telematic ApplicationsDokument13 SeitenA Dynamic Traffic Assignment Method For Planning and Telematic ApplicationsHenriqueNoch keine Bewertungen
- A Fastest Route Planning For LBS Based On TrafficDokument7 SeitenA Fastest Route Planning For LBS Based On TrafficNajim M HashimNoch keine Bewertungen
- 1 s2.0 S0020025522013779 MainDokument16 Seiten1 s2.0 S0020025522013779 MainArif ColabNoch keine Bewertungen
- Anatomy and Efficiency of Urban Multimodal Mobility, Riccardo Galloti, 2014Dokument9 SeitenAnatomy and Efficiency of Urban Multimodal Mobility, Riccardo Galloti, 2014garidosebastNoch keine Bewertungen
- Modelling and Analysis of Oversaturated Intersections Using Jointly Hybrid Petri Net and Hybrid AutomataDokument13 SeitenModelling and Analysis of Oversaturated Intersections Using Jointly Hybrid Petri Net and Hybrid Automatanaumanhaider007Noch keine Bewertungen
- Mobile Traffic Prediction From Raw Data Using LSTM Networks: Hoang Duy Trinh, Lorenza Giupponi, Paolo DiniDokument6 SeitenMobile Traffic Prediction From Raw Data Using LSTM Networks: Hoang Duy Trinh, Lorenza Giupponi, Paolo DinirahmatNoch keine Bewertungen
- HiddenMarkov PredDokument9 SeitenHiddenMarkov Predmrcord814800Noch keine Bewertungen
- A Survey On The Characterization of Vehicular Ad Hoc Networks and Routing SolutionsDokument17 SeitenA Survey On The Characterization of Vehicular Ad Hoc Networks and Routing SolutionsspattannNoch keine Bewertungen
- Transportation Research Part C: Nicholas G. Polson, Vadim O. SokolovDokument17 SeitenTransportation Research Part C: Nicholas G. Polson, Vadim O. SokolovSNKNoch keine Bewertungen
- A Graph-Temporal Urban Rail Fused Deep Learning MethodDokument30 SeitenA Graph-Temporal Urban Rail Fused Deep Learning MethoddonoglueNoch keine Bewertungen
- Real-Time Traffic Congestion PredictionDokument5 SeitenReal-Time Traffic Congestion PredictionTutorial Storage TwoNoch keine Bewertungen
- Design and Implementation of Hybrid Routing Algorithm For VANETDokument5 SeitenDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNoch keine Bewertungen
- Traffic SimultaionDokument12 SeitenTraffic SimultaionYessyNoch keine Bewertungen
- 1 s2.0 S0968090X2100437X MainDokument23 Seiten1 s2.0 S0968090X2100437X MainAymanNoch keine Bewertungen
- J Neunet 2021 05 035Dokument25 SeitenJ Neunet 2021 05 035sohel ranaNoch keine Bewertungen
- Research On Lane Occupancy Rate Forecasting BasedDokument10 SeitenResearch On Lane Occupancy Rate Forecasting BasedCreate IInnocateNoch keine Bewertungen
- ManuscriptDokument20 SeitenManuscriptsadaf.brsindiaNoch keine Bewertungen
- Distributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksDokument14 SeitenDistributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksVicky PatelNoch keine Bewertungen
- Transportation Research Part C: Xiao Han, Guojiang Shen, Xi Yang, Xiangjie KongDokument16 SeitenTransportation Research Part C: Xiao Han, Guojiang Shen, Xi Yang, Xiangjie KongEnzoNoch keine Bewertungen
- Overview 1.1: Research On Traffic Speed AnalysisDokument18 SeitenOverview 1.1: Research On Traffic Speed AnalysisnivethaNoch keine Bewertungen
- Research Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceDokument12 SeitenResearch Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceRohit BudhwaniNoch keine Bewertungen
- IET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalDokument13 SeitenIET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalXia YangNoch keine Bewertungen
- Estimation of Average Space Headway Under Heterogeneous Traffic ConditionsDokument5 SeitenEstimation of Average Space Headway Under Heterogeneous Traffic Conditionsangelica butonNoch keine Bewertungen
- Traffic Using GPSDokument18 SeitenTraffic Using GPSSanjidanahid ShornaNoch keine Bewertungen
- Sobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020Dokument12 SeitenSobre El Cálculo de Caminos Óptimos de Pareto en Ponderado 2020rafaelrojasmillanNoch keine Bewertungen
- Transportation and Traffic TheoryDokument21 SeitenTransportation and Traffic TheorysaobracajniNoch keine Bewertungen
- A Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban TrafficDokument13 SeitenA Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban Trafficchongqi heNoch keine Bewertungen
- LTE Uplink Scheduling - Flow Level AnalysisDokument12 SeitenLTE Uplink Scheduling - Flow Level Analysiswood_ksd3251Noch keine Bewertungen
- Almaashri 3545Dokument10 SeitenAlmaashri 3545Hayat BokkhariNoch keine Bewertungen
- Optimizing Bus Transit Network With Parallel Ant Colony AlgorithmDokument16 SeitenOptimizing Bus Transit Network With Parallel Ant Colony AlgorithmKaio AlmeidaNoch keine Bewertungen
- Sensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioDokument16 SeitenSensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioJokosystems NigeriaNoch keine Bewertungen
- Application Level Relay For High-Bandwidth Data Transport: A A A B A A BDokument21 SeitenApplication Level Relay For High-Bandwidth Data Transport: A A A B A A BAbbas sabbarNoch keine Bewertungen
- REAFFIRM: Model-Based Repair of Hybrid Systems For Improving ResiliencyDokument12 SeitenREAFFIRM: Model-Based Repair of Hybrid Systems For Improving ResiliencysparkshockNoch keine Bewertungen
- Mechanical Systems and Signal Processing: Hongxiang Yu, Mengchen Xu, Jie ZhaoDokument15 SeitenMechanical Systems and Signal Processing: Hongxiang Yu, Mengchen Xu, Jie ZhaosparkshockNoch keine Bewertungen
- Metrics For Deep Generative ModelsDokument11 SeitenMetrics For Deep Generative ModelssparkshockNoch keine Bewertungen
- LSTM With Varying Length SequencesDokument2 SeitenLSTM With Varying Length SequencessparkshockNoch keine Bewertungen
- Camera Matrix: 16-385 Computer Vision (Kris Kitani)Dokument38 SeitenCamera Matrix: 16-385 Computer Vision (Kris Kitani)sparkshockNoch keine Bewertungen
- Scan Jan 26, 2020Dokument1 SeiteScan Jan 26, 2020sparkshockNoch keine Bewertungen
- Calculations, LVDT Dimensions SolartronDokument2 SeitenCalculations, LVDT Dimensions SolartronsparkshockNoch keine Bewertungen
- 101 Sabaq Amoz Waqiat (PdfStuff - Blogspot.com)Dokument417 Seiten101 Sabaq Amoz Waqiat (PdfStuff - Blogspot.com)sparkshockNoch keine Bewertungen
- Cordova Jewel of The WorldDokument1 SeiteCordova Jewel of The WorldsparkshockNoch keine Bewertungen
- Nernst Equation Example Problems: Echem - MCD 1/3/02Dokument9 SeitenNernst Equation Example Problems: Echem - MCD 1/3/02sparkshockNoch keine Bewertungen
- CorrosionDokument59 SeitenCorrosionsparkshock100% (1)
- Integral TableDokument14 SeitenIntegral TablesparkshockNoch keine Bewertungen
- How To Draw A House in Two Point PerspectiveDokument1 SeiteHow To Draw A House in Two Point PerspectiveCrina CriNoch keine Bewertungen
- MATH 304 Linear Algebra Basis and DimensionDokument16 SeitenMATH 304 Linear Algebra Basis and DimensionsparkshockNoch keine Bewertungen
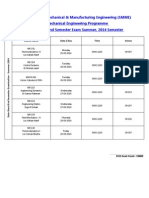
- NUST School of Mechanical & Manufacturing Engineering (SMME) BE Mechanical Engineering Programme Date Sheet - End Semester Exam Summer, 2014 SemesterDokument1 SeiteNUST School of Mechanical & Manufacturing Engineering (SMME) BE Mechanical Engineering Programme Date Sheet - End Semester Exam Summer, 2014 SemestersparkshockNoch keine Bewertungen
- Engineering Dynamics: Kinetics of A Particle: Work and EnergyDokument25 SeitenEngineering Dynamics: Kinetics of A Particle: Work and EnergysparkshockNoch keine Bewertungen
- Traffic Impact Analysis GuidelinesDokument15 SeitenTraffic Impact Analysis Guidelinesarishdb100% (1)
- Dokumen - Tips Amovp 1 2004 Road Movements and Movement ControlDokument133 SeitenDokumen - Tips Amovp 1 2004 Road Movements and Movement ControlHristina MarinovaNoch keine Bewertungen
- Daring Tales of Adventure 01 - To End All Wa PDFDokument24 SeitenDaring Tales of Adventure 01 - To End All Wa PDFjingirou100% (1)
- How To Give Directions in English Instructions Exa Classroom Posters Conversation Topics Dialogs Fun - 120678Dokument5 SeitenHow To Give Directions in English Instructions Exa Classroom Posters Conversation Topics Dialogs Fun - 120678Maria joseNoch keine Bewertungen
- Chapter 5 Traffic StreamDokument16 SeitenChapter 5 Traffic StreamMuhammad Faisal Habib JanjuaNoch keine Bewertungen
- Trail Crossing Agreements & Trail Crossings of State HighwaysDokument102 SeitenTrail Crossing Agreements & Trail Crossings of State HighwaysSilas ChamberlinNoch keine Bewertungen
- Osnove SaobracajaDokument315 SeitenOsnove SaobracajaJelena RajovicNoch keine Bewertungen
- CIV3703 Transport Engineering (USQ)Dokument62 SeitenCIV3703 Transport Engineering (USQ)hao baiNoch keine Bewertungen
- Quebec - Largura de ViasDokument10 SeitenQuebec - Largura de ViasJuarez Paulo Calvi FilhoNoch keine Bewertungen
- Motion For Century City NTMPDokument2 SeitenMotion For Century City NTMPapi-120111658Noch keine Bewertungen
- Chapter - 4-Geometric Design of Highways Sight Distance (Part 1)Dokument13 SeitenChapter - 4-Geometric Design of Highways Sight Distance (Part 1)Tewodros AbateNoch keine Bewertungen
- Feasibility For All Zila Road - V3!03!10-2023Dokument442 SeitenFeasibility For All Zila Road - V3!03!10-2023anon_878652989Noch keine Bewertungen
- Unsafe Acts & Unsafe ConditionsDokument48 SeitenUnsafe Acts & Unsafe Conditionsvan geraldNoch keine Bewertungen
- 06 CE 122 Intersection Design & AnalysisDokument21 Seiten06 CE 122 Intersection Design & AnalysisJan Kenneth BarazonNoch keine Bewertungen
- Concrete Paving Technology - Concrete Intersections - A Guide For Design and ConstrucctionDokument28 SeitenConcrete Paving Technology - Concrete Intersections - A Guide For Design and Construcctionoscargon19Noch keine Bewertungen
- M.tech (CIVIL) Transport Engineering - JNTU SyllabusDokument10 SeitenM.tech (CIVIL) Transport Engineering - JNTU SyllabusBhola ShankerNoch keine Bewertungen
- Bagabaldo at AlDokument20 SeitenBagabaldo at AlMae Ann SacayNoch keine Bewertungen
- Bridge InspectionDokument18 SeitenBridge InspectionAlfredo Romero G100% (1)
- A-Revised-Method-For-The-Determination-Of-Passenger Car Equvalent - 1980 - Transportation-Research-PDokument6 SeitenA-Revised-Method-For-The-Determination-Of-Passenger Car Equvalent - 1980 - Transportation-Research-Pfood diariesssNoch keine Bewertungen
- Transportation Demand AnalysisDokument32 SeitenTransportation Demand AnalysisAgerico FunelasNoch keine Bewertungen
- Khao Sat Chat Luong Dau Nam Lop 10 Mon Tieng AnhDokument9 SeitenKhao Sat Chat Luong Dau Nam Lop 10 Mon Tieng AnhhuongNoch keine Bewertungen
- Ghana PPP ProgrammeDokument20 SeitenGhana PPP ProgrammefornaraNoch keine Bewertungen
- Ise Wan Martis User Manual (En) 2Dokument32 SeitenIse Wan Martis User Manual (En) 2sccm trainingNoch keine Bewertungen
- 11 01 18 PAV SUS Methodology Pavement EstructuralDokument108 Seiten11 01 18 PAV SUS Methodology Pavement EstructuralSergioGaldamesPérezNoch keine Bewertungen
- DOT Fy2021 Capa Regulatory Agenda - FinalDokument17 SeitenDOT Fy2021 Capa Regulatory Agenda - FinalGersh KuntzmanNoch keine Bewertungen
- Old Zigzag Road FinalDokument3 SeitenOld Zigzag Road FinalAlex PinlacNoch keine Bewertungen
- Basement StandardDokument33 SeitenBasement StandardKai Khan75% (4)
- Traffic Microsimulation & 3-D Visualization: Presenters: Fadi Emil Nassar, P.E. Veronica A. Boza, E.I. - MAY 4, 2007Dokument38 SeitenTraffic Microsimulation & 3-D Visualization: Presenters: Fadi Emil Nassar, P.E. Veronica A. Boza, E.I. - MAY 4, 2007Karan AroraNoch keine Bewertungen
- Crawford Product Catalogue PDFDokument88 SeitenCrawford Product Catalogue PDFjohn topasNoch keine Bewertungen
- MethodologyDokument2 SeitenMethodologyaQuAmiRaNoch keine Bewertungen