Das könnte Ihnen auch gefallen
- Gate Os 2 2017Dokument50 SeitenGate Os 2 2017basualok@rediffmail.comNoch keine Bewertungen
- Chapter 10Dokument7 SeitenChapter 10Stanislau DevNoch keine Bewertungen
- Algorithm: Enhanced Second Chance Best Combination: Dirty Bit Is 0 and R Bit Is 0Dokument8 SeitenAlgorithm: Enhanced Second Chance Best Combination: Dirty Bit Is 0 and R Bit Is 0SANA OMARNoch keine Bewertungen
- 8.11 Given Six Memory Partitions of 300KB, 600KB, 350KB, 200KBDokument20 Seiten8.11 Given Six Memory Partitions of 300KB, 600KB, 350KB, 200KBAnshita VarshneyNoch keine Bewertungen
- Demand Paging: Amna Ahmad Muhammad MustafaDokument24 SeitenDemand Paging: Amna Ahmad Muhammad MustafaAmna AhmadNoch keine Bewertungen
- Chapter 9Dokument17 SeitenChapter 9Pratap SinghNoch keine Bewertungen
- 4.page Replacement Algorithms in Operating SystemsDokument6 Seiten4.page Replacement Algorithms in Operating SystemsIshaan SinghNoch keine Bewertungen
- Virtual Memory: Complete LectureDokument46 SeitenVirtual Memory: Complete LectureWEBSITE NINJANoch keine Bewertungen
- Virtual Memory ManagementDokument25 SeitenVirtual Memory ManagementAyushi TodiNoch keine Bewertungen
- Adama Science and Technology University: Operating SystemsDokument7 SeitenAdama Science and Technology University: Operating SystemsDEABELA GAMING 2Noch keine Bewertungen
- Paging: ExampleDokument11 SeitenPaging: ExampleBijal patelNoch keine Bewertungen
- hw4 SolDokument3 Seitenhw4 SoladvifulNoch keine Bewertungen
- Virtual MemoryDokument11 SeitenVirtual Memorybalabhaskar mandalaNoch keine Bewertungen
- Os Unit 4Dokument14 SeitenOs Unit 4Sahil PahwaNoch keine Bewertungen
- Os + DsDokument12 SeitenOs + DsAniket AggarwalNoch keine Bewertungen
- Chapter 9: Virtual Memory: Al-Mansour University College Software Engineering and Information Technology DepartmentDokument76 SeitenChapter 9: Virtual Memory: Al-Mansour University College Software Engineering and Information Technology DepartmentLana YahyaNoch keine Bewertungen
- Algorithm For Page ReplacementDokument13 SeitenAlgorithm For Page Replacementmo3awia2099Noch keine Bewertungen
- Virtual Memory ManagementDokument5 SeitenVirtual Memory ManagementHrishikesh BhaskaranNoch keine Bewertungen
- Exam OS - Ready! PDFDokument8 SeitenExam OS - Ready! PDFCaris TchobsiNoch keine Bewertungen
- Comp3511 Spring16 hw4Dokument6 SeitenComp3511 Spring16 hw4Wu DicksonNoch keine Bewertungen
- Materi SO - 9Dokument69 SeitenMateri SO - 9135 Novariya Br SaragihNoch keine Bewertungen
- Week10 Virtual MemoryDokument58 SeitenWeek10 Virtual Memorymanyagarg787Noch keine Bewertungen
- Lecture 25Dokument25 SeitenLecture 25Vikas ChoudharyNoch keine Bewertungen
- 3q345fyijokpl (Dokument8 Seiten3q345fyijokpl (Soumyaprakash PaniNoch keine Bewertungen
- 9-Introduction To PagingDokument3 Seiten9-Introduction To PagingKurumeti Naga Surya Lakshmana KumarNoch keine Bewertungen
- Nav 6Dokument6 SeitenNav 6shailesh singhNoch keine Bewertungen
- Course Instructor: Nausheen ShoaibDokument70 SeitenCourse Instructor: Nausheen ShoaibafnanNoch keine Bewertungen
- Virtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarDokument32 SeitenVirtual Memory and Memory Management Requirement: Presented By: Ankit Sharma Nitesh Pandey Manish KumarAnkit SinghNoch keine Bewertungen
- WeekDokument82 SeitenWeekMaaz ChowdhryNoch keine Bewertungen
- Aos Assignments4Dokument10 SeitenAos Assignments4DevendraNoch keine Bewertungen
- Chapter 9: Virtual Memory: Silberschatz, Galvin and Gagne ©2011 Operating System Concepts Essentials - 8 EditionDokument42 SeitenChapter 9: Virtual Memory: Silberschatz, Galvin and Gagne ©2011 Operating System Concepts Essentials - 8 EditionManohar DattNoch keine Bewertungen
- Virtual Memory: A) Processes A) Oldest Page Is ChosenDokument6 SeitenVirtual Memory: A) Processes A) Oldest Page Is ChosenYellaturi Siva Kishore ReddyNoch keine Bewertungen
- Memory Management IIIDokument23 SeitenMemory Management IIIshamza hanifNoch keine Bewertungen
- Assignment 5 OsDokument11 SeitenAssignment 5 OsAmit SharmaNoch keine Bewertungen
- Operating Systems AnswersDokument14 SeitenOperating Systems AnswersBunny BunnyNoch keine Bewertungen
- What Are The Physical Addresses For The Following Logical AddressesDokument5 SeitenWhat Are The Physical Addresses For The Following Logical AddressesObelisk4100% (2)
- Memory Management - Segmentation Paging and Virtual MemoryDokument6 SeitenMemory Management - Segmentation Paging and Virtual MemorySuhail Alam KhanNoch keine Bewertungen
- 4memory ManagementDokument14 Seiten4memory ManagementPianic PelmaNoch keine Bewertungen
- Assignment OF Operating System Cse 316: Name:-Rohit Singh Miss KanikaDokument4 SeitenAssignment OF Operating System Cse 316: Name:-Rohit Singh Miss KanikaRohit SinghNoch keine Bewertungen
- Virtual Memory RevisionDokument10 SeitenVirtual Memory RevisionAditya KumarNoch keine Bewertungen
- Os Module 4 NotesDokument51 SeitenOs Module 4 Notes19. sai roopeshNoch keine Bewertungen
- Week 10 CH 9 VirtualMemoryDokument7 SeitenWeek 10 CH 9 VirtualMemoryAdnan Alam KhanNoch keine Bewertungen
- Logical Address: Physical Address: Memory Management UnitDokument7 SeitenLogical Address: Physical Address: Memory Management UnitAvishek ChowdhuryNoch keine Bewertungen
- CPSC 457 Operating Systems Final Exam SolutionDokument11 SeitenCPSC 457 Operating Systems Final Exam SolutionmuanaserNoch keine Bewertungen
- Tutorial (Chapter 9)Dokument4 SeitenTutorial (Chapter 9)MATHAVAN A L KRISHNANNoch keine Bewertungen
- Project 5Dokument8 SeitenProject 5nurin khatoonNoch keine Bewertungen
- Bachelor of Science in Computer EngineeringDokument12 SeitenBachelor of Science in Computer EngineeringDarwin John LavarezNoch keine Bewertungen
- Operating System ReviwDokument24 SeitenOperating System ReviwRafael D. SanchezNoch keine Bewertungen
- Virtual Memory MGMT - Module 4Dokument57 SeitenVirtual Memory MGMT - Module 4Harshitha SinghNoch keine Bewertungen
- Question Bank - Unit3Dokument10 SeitenQuestion Bank - Unit3Pratham WakdeNoch keine Bewertungen
- Chapter 3 - Memory Management (Virtual Memory Systems)Dokument53 SeitenChapter 3 - Memory Management (Virtual Memory Systems)shania nkusiNoch keine Bewertungen
- Chap 9 QuestDokument3 SeitenChap 9 Questrhea agulayNoch keine Bewertungen
- Cs8493 - Operating SystemsDokument7 SeitenCs8493 - Operating SystemsPawan NaniNoch keine Bewertungen
- Memory Manegment ch#7 Operating SystemDokument100 SeitenMemory Manegment ch#7 Operating SystemFreke HuŠsyNoch keine Bewertungen
- Question 1: MULTIPLE CHOICE QUESTIONS (20 Marks)Dokument11 SeitenQuestion 1: MULTIPLE CHOICE QUESTIONS (20 Marks)aimen_riyadhNoch keine Bewertungen
- 11 Virtual-MemoryDokument81 Seiten11 Virtual-Memoryyogeshwari bahiramNoch keine Bewertungen
- 1 Virtual Memory DetailsDokument2 Seiten1 Virtual Memory Detailssreevinoth20089892Noch keine Bewertungen
- ExampleDokument9 SeitenExamplesubash1111@gmail.comNoch keine Bewertungen
- 2019 Spring OS Assignment # 4 VMMDokument8 Seiten2019 Spring OS Assignment # 4 VMMAsad AliNoch keine Bewertungen
- DBMS IntroDokument53 SeitenDBMS IntroramNoch keine Bewertungen
- COMPUTER NETWORKS OSI MODEL MCQsDokument52 SeitenCOMPUTER NETWORKS OSI MODEL MCQsramNoch keine Bewertungen
- MODULE-1 Quality, Strategic Planning and Competitive AdvantageDokument10 SeitenMODULE-1 Quality, Strategic Planning and Competitive AdvantageramNoch keine Bewertungen
- Managing and Organization For QualityDokument10 SeitenManaging and Organization For QualityramNoch keine Bewertungen
- 16 Ubi 518 - Customer Relationship Management K1 - Level Multiple Choice Questions: Unit - IDokument19 Seiten16 Ubi 518 - Customer Relationship Management K1 - Level Multiple Choice Questions: Unit - IramNoch keine Bewertungen
- COMPUTER NETWORKS OSI MODEL MCQsDokument49 SeitenCOMPUTER NETWORKS OSI MODEL MCQsram100% (1)
- MAIN Electrical Parts List: FirmwareDokument13 SeitenMAIN Electrical Parts List: FirmwareDayronToroNoch keine Bewertungen
- 2G Drive TestDokument73 Seiten2G Drive TestMohamed Maged ElgisrNoch keine Bewertungen
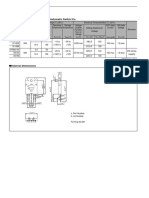
- Datasheet str81159Dokument1 SeiteDatasheet str81159Elect Yan LumosoNoch keine Bewertungen
- The Difference Between RAM Speed and CAS LatencyDokument1 SeiteThe Difference Between RAM Speed and CAS LatencyVlad VahnovanuNoch keine Bewertungen
- Sla 4060Dokument1 SeiteSla 4060Aditya Ali SyafrudinNoch keine Bewertungen
- RMI Series InverterDokument2 SeitenRMI Series InverterCuong HTNoch keine Bewertungen
- Playing Music With 8051 Micro ControllerDokument16 SeitenPlaying Music With 8051 Micro ControllerVignesh RavishankarNoch keine Bewertungen
- Abaco Systems V7768 Manual 202031713269Dokument94 SeitenAbaco Systems V7768 Manual 202031713269tt cheneyNoch keine Bewertungen
- Lecture 1 - Databases and Database UsersDokument35 SeitenLecture 1 - Databases and Database UsersSuNoch keine Bewertungen
- 35 Watt EER28 Power Transformer: Application: LCD MonitorDokument1 Seite35 Watt EER28 Power Transformer: Application: LCD Monitordami pelNoch keine Bewertungen
- 5G Technology: Towards Dynamic Spectrum Sharing Using Cognitive Radio NetworksDokument29 Seiten5G Technology: Towards Dynamic Spectrum Sharing Using Cognitive Radio NetworksHabib MohammedNoch keine Bewertungen
- Microprocessor & Microcontrollers: Jump, Loop, and Call InstructionsDokument9 SeitenMicroprocessor & Microcontrollers: Jump, Loop, and Call InstructionsAbdul Rehman AfzalNoch keine Bewertungen
- SG 13i Ed For CD v4Dokument275 SeitenSG 13i Ed For CD v4Keith100% (2)
- Chapter # 1 Characteristics and Evolution of ComputerDokument10 SeitenChapter # 1 Characteristics and Evolution of Computeradeeba arshadNoch keine Bewertungen
- 6-71-W54S0-D03 W970suw PDFDokument104 Seiten6-71-W54S0-D03 W970suw PDFClandestino CipollettiNoch keine Bewertungen
- Automatic Plant Watering SystemDokument5 SeitenAutomatic Plant Watering Systemsmartxdigital marketNoch keine Bewertungen
- MCQs in Microwave Communications Part IXDokument9 SeitenMCQs in Microwave Communications Part IXRaghu Veer KNoch keine Bewertungen
- 8051 Microcontroller Introduction, Basics and FeaturesDokument13 Seiten8051 Microcontroller Introduction, Basics and Featuresনিউ আদু ভাইNoch keine Bewertungen
- Synopsis Guidelines KCS354Dokument3 SeitenSynopsis Guidelines KCS354Ritika SinghNoch keine Bewertungen
- 06 Studies BSC Electronics-Telecommunications 5 2 PDFDokument2 Seiten06 Studies BSC Electronics-Telecommunications 5 2 PDFSimba MukonoNoch keine Bewertungen
- Fig. 2.44 Half-Wave Rectifier.: Electronic Devices and Circuit Theory, 9eDokument160 SeitenFig. 2.44 Half-Wave Rectifier.: Electronic Devices and Circuit Theory, 9eLelouch ViNoch keine Bewertungen
- Bee Micro ProjectDokument10 SeitenBee Micro Projectamitsonkar509Noch keine Bewertungen
- Ecs Ef10mix V01Dokument35 SeitenEcs Ef10mix V01lioNoch keine Bewertungen
- Characteristics of Digital DataDokument6 SeitenCharacteristics of Digital DataArdi DiraNoch keine Bewertungen
- Distribution Overcurrent Protection and CoordinationDokument52 SeitenDistribution Overcurrent Protection and CoordinationRonieboy Baliber CairoNoch keine Bewertungen
- Build A Cheap Oscilloscope and Sensor Probes For Physics Experiments in SchoolDokument45 SeitenBuild A Cheap Oscilloscope and Sensor Probes For Physics Experiments in SchooltecsupportNoch keine Bewertungen
- Wireless LCD TV Notice BoardDokument20 SeitenWireless LCD TV Notice BoardVijay ChaursiyaNoch keine Bewertungen
- Service Manual Compact Balances: Kern FCBDokument17 SeitenService Manual Compact Balances: Kern FCBLiliana RafaelNoch keine Bewertungen
- 880GMH/U3S3: User ManualDokument56 Seiten880GMH/U3S3: User ManualjirihavNoch keine Bewertungen
- Os PPT Galvin Chapter1Dokument29 SeitenOs PPT Galvin Chapter1Vishal ThakurNoch keine Bewertungen