Das könnte Ihnen auch gefallen
- SvdnotesDokument10 SeitenSvdnotesmaroju prashanthNoch keine Bewertungen
- Introduction To Linear Algebra V: 1 Eigenvalue and EigenvectorDokument4 SeitenIntroduction To Linear Algebra V: 1 Eigenvalue and EigenvectorRoghieh Mahdavi HajiNoch keine Bewertungen
- Math 5390 Chapter 2Dokument5 SeitenMath 5390 Chapter 2Mauricio AntonioNoch keine Bewertungen
- MTH101Dokument13 SeitenMTH101Deepanshu BansalNoch keine Bewertungen
- SVD NotesDokument7 SeitenSVD Notes禹范Noch keine Bewertungen
- Hermitian MatrixesDokument26 SeitenHermitian Matrixesph abeynayakeNoch keine Bewertungen
- Linear Algebra and Applications: Benjamin RechtDokument42 SeitenLinear Algebra and Applications: Benjamin RechtKarzan Kaka SwrNoch keine Bewertungen
- Singular Value Decomposition Example PDFDokument9 SeitenSingular Value Decomposition Example PDFawekeuNoch keine Bewertungen
- Final Exam Ques SolDokument11 SeitenFinal Exam Ques SolLeng RyanNoch keine Bewertungen
- Quiz 2 SolutionDokument3 SeitenQuiz 2 SolutionTumpa MitraNoch keine Bewertungen
- Mathematical Foundations123Dokument22 SeitenMathematical Foundations123Lohit Kumar SahooNoch keine Bewertungen
- Eigenvalues: Matrices: Geometric InterpretationDokument8 SeitenEigenvalues: Matrices: Geometric InterpretationTu DuongNoch keine Bewertungen
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDokument6 SeitenProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNoch keine Bewertungen
- Handout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesDokument9 SeitenHandout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesFrancisNoch keine Bewertungen
- 1 Basic Linear AlgebraDokument6 Seiten1 Basic Linear AlgebraDevendraReddyPoreddyNoch keine Bewertungen
- Linear Algebra Cheat-Sheet: Laurent LessardDokument13 SeitenLinear Algebra Cheat-Sheet: Laurent LessardAnantDashputeNoch keine Bewertungen
- Can You Hear The Shape of A Manifold?: Andrejs TreibergsDokument44 SeitenCan You Hear The Shape of A Manifold?: Andrejs TreibergszazarNoch keine Bewertungen
- Linear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundDokument8 SeitenLinear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundZeus HeraklesNoch keine Bewertungen
- Math 121A: Solutions To Final Exam: AnswerDokument12 SeitenMath 121A: Solutions To Final Exam: AnswercfisicasterNoch keine Bewertungen
- Ch1-4 Quadratic FormsDokument7 SeitenCh1-4 Quadratic FormssempiNoch keine Bewertungen
- λ and vectors x = 0 f or which Ax = λxDokument22 Seitenλ and vectors x = 0 f or which Ax = λxJohn MarkNoch keine Bewertungen
- 11 - Quadratic Forms and EllipsoidsDokument21 Seiten11 - Quadratic Forms and EllipsoidsMatheus DomingosNoch keine Bewertungen
- Section 8-2Dokument10 SeitenSection 8-2MauricioNoch keine Bewertungen
- MA5158 Unit I Section 5Dokument29 SeitenMA5158 Unit I Section 5SanjayNoch keine Bewertungen
- KC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDokument17 SeitenKC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDarabaGabriellNoch keine Bewertungen
- Lecture Notes For Math 623 Matrix Analysis: 1 Normal MatricesDokument9 SeitenLecture Notes For Math 623 Matrix Analysis: 1 Normal MatricesCamilo Almandos CardonaNoch keine Bewertungen
- Solucionario Principio de Analisis MatematicoDokument45 SeitenSolucionario Principio de Analisis MatematicoMaterial IngenieriaNoch keine Bewertungen
- Further Mathematical Methods (Linear Algebra) Solutions For Problem Sheet 8Dokument15 SeitenFurther Mathematical Methods (Linear Algebra) Solutions For Problem Sheet 8Gag PafNoch keine Bewertungen
- Applications of Derivatives: Chapter HighlightsDokument62 SeitenApplications of Derivatives: Chapter HighlightsAditya WanwadeNoch keine Bewertungen
- Eigenvalues and EigenvectorsDokument23 SeitenEigenvalues and EigenvectorsViorel AdirvaNoch keine Bewertungen
- 05.1 PP 3 14 Deterministic MatricesDokument12 Seiten05.1 PP 3 14 Deterministic Matricesqwsx098Noch keine Bewertungen
- Orthogonal Matrices and Gram-Schmidt: Orthonormal VectorsDokument4 SeitenOrthogonal Matrices and Gram-Schmidt: Orthonormal VectorsArulloh SonjaNoch keine Bewertungen
- 408 NoteDokument57 Seiten408 Notevaibhavsingh4594Noch keine Bewertungen
- Lect 9Dokument6 SeitenLect 9Stallion WayzNoch keine Bewertungen
- Lect3 06webDokument23 SeitenLect3 06webSJ95kabirNoch keine Bewertungen
- CH 3Dokument8 SeitenCH 3Tsoi Yun PuiNoch keine Bewertungen
- Determinants and Diagonalization (Continue 2)Dokument17 SeitenDeterminants and Diagonalization (Continue 2)Duong Thanh Duy (K17 QN)Noch keine Bewertungen
- K Is An: Ramanujan GraphsDokument8 SeitenK Is An: Ramanujan GraphsVinay KumarNoch keine Bewertungen
- Lecture 11Dokument6 SeitenLecture 11anket21-307Noch keine Bewertungen
- ∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrDokument9 Seiten∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrMuartz McNoch keine Bewertungen
- My Notes For Linear Algebra 987654Dokument33 SeitenMy Notes For Linear Algebra 987654Shah FahadNoch keine Bewertungen
- Eigenvalue Problem PDFDokument35 SeitenEigenvalue Problem PDFMikhail TabucalNoch keine Bewertungen
- Dr.R.Venkatesan MatricesDokument63 SeitenDr.R.Venkatesan MatricesSai Vasanth GNoch keine Bewertungen
- Linear Algebra & Analysis Review As Covered in Class UW EE/AA/ME 578 Convex OptimizationDokument16 SeitenLinear Algebra & Analysis Review As Covered in Class UW EE/AA/ME 578 Convex OptimizationAbby JonesNoch keine Bewertungen
- Interpreting Linear Equations: EE263 Autumn 2015 S. Boyd and S. LallDokument15 SeitenInterpreting Linear Equations: EE263 Autumn 2015 S. Boyd and S. LallStephen Velasco VillaruzNoch keine Bewertungen
- STAT2011 2017 Exam Formulae PDFDokument3 SeitenSTAT2011 2017 Exam Formulae PDFeccentricftw4Noch keine Bewertungen
- Chapter 0 - Miscellaneous Preliminaries: EE 520: Topics - Compressed Sensing Linear Algebra ReviewDokument18 SeitenChapter 0 - Miscellaneous Preliminaries: EE 520: Topics - Compressed Sensing Linear Algebra ReviewmohanNoch keine Bewertungen
- MATH 4A - Linear Algebra With Applications: Lecture 25: Angles and OrthogonalityDokument20 SeitenMATH 4A - Linear Algebra With Applications: Lecture 25: Angles and OrthogonalityakshayNoch keine Bewertungen
- EN530.678 Nonlinear Control and Planning in Robotics Lecture 1: Matrix Algebra Basics January 27, 2020Dokument4 SeitenEN530.678 Nonlinear Control and Planning in Robotics Lecture 1: Matrix Algebra Basics January 27, 2020SAYED JAVED ALI SHAHNoch keine Bewertungen
- 3: Divide and Conquer: Fourier Transform: PolynomialDokument8 Seiten3: Divide and Conquer: Fourier Transform: PolynomialCajun SefNoch keine Bewertungen
- 3: Divide and Conquer: Fourier Transform: PolynomialDokument8 Seiten3: Divide and Conquer: Fourier Transform: PolynomialIrmak ErkolNoch keine Bewertungen
- Lect 1Dokument8 SeitenLect 1Stallion WayzNoch keine Bewertungen
- 11 Linearmodels 3Dokument13 Seiten11 Linearmodels 3SCRBDusernmNoch keine Bewertungen
- Inverse of A Matrix: CHAPT E R 1 Systems of Linear Equations and MatricesDokument8 SeitenInverse of A Matrix: CHAPT E R 1 Systems of Linear Equations and MatricesPhạm Lê Tuyết NhungNoch keine Bewertungen
- Mathprimer NupDokument2 SeitenMathprimer NupMayam AyoNoch keine Bewertungen
- Section 07: Solutions: 1. Using The EigenbasisDokument4 SeitenSection 07: Solutions: 1. Using The EigenbasisAkansha KalraNoch keine Bewertungen
- Module 4 DiagonalisationDokument35 SeitenModule 4 Diagonalisationaadhilakshmimr2025Noch keine Bewertungen
- Application of Quaternions To Computa-Tion With Rotations: Working Paper, Stanford AI Lab, 1979 by Eugene SalaminDokument9 SeitenApplication of Quaternions To Computa-Tion With Rotations: Working Paper, Stanford AI Lab, 1979 by Eugene Salaminmani.bakthaNoch keine Bewertungen
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Von EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Noch keine Bewertungen
- Transmutation and Operator Differential EquationsVon EverandTransmutation and Operator Differential EquationsNoch keine Bewertungen
- Vocabulary - 2 Classroom Exercise Based On Vocab: Malign FrivolousDokument1 SeiteVocabulary - 2 Classroom Exercise Based On Vocab: Malign Frivolousशिवम् सुनील कुमारNoch keine Bewertungen
- Vocabulary - 2 Classroom Exercise Based On Vocab: Mulct ScurrilousDokument1 SeiteVocabulary - 2 Classroom Exercise Based On Vocab: Mulct Scurrilousशिवम् सुनील कुमारNoch keine Bewertungen
- Inner Product Space IITBDokument13 SeitenInner Product Space IITBशिवम् सुनील कुमारNoch keine Bewertungen
- GATE Mathematics 2001 PDFDokument7 SeitenGATE Mathematics 2001 PDFशिवम् सुनील कुमारNoch keine Bewertungen
- GATE Mathematics 2002 PDFDokument8 SeitenGATE Mathematics 2002 PDFशिवम् सुनील कुमारNoch keine Bewertungen
- CUCET Syllabus For PH.D Mathematics PDFDokument1 SeiteCUCET Syllabus For PH.D Mathematics PDFशिवम् सुनील कुमारNoch keine Bewertungen
- Gate 2015 PDFDokument11 SeitenGate 2015 PDFशिवम् सुनील कुमारNoch keine Bewertungen
- MMT-007Dokument5 SeitenMMT-007शिवम् सुनील कुमारNoch keine Bewertungen
- S Chand Discrete Mathematics Books PDFDokument3 SeitenS Chand Discrete Mathematics Books PDFशिवम् सुनील कुमार0% (4)
- National Board For Higher MathematicsDokument7 SeitenNational Board For Higher Mathematicsशिवम् सुनील कुमारNoch keine Bewertungen
- A Note On The Seven Bridges of Konigsberg ProblemDokument2 SeitenA Note On The Seven Bridges of Konigsberg Problemशिवम् सुनील कुमारNoch keine Bewertungen
- Addis Ababa City Administration Education Bureau Grade Eight Model Exam Examination 2012/ 2020Dokument13 SeitenAddis Ababa City Administration Education Bureau Grade Eight Model Exam Examination 2012/ 2020शिवम् सुनील कुमार100% (2)
- Differential EquationDokument16 SeitenDifferential Equationशिवम् सुनील कुमारNoch keine Bewertungen
- 1 PDFDokument1 Seite1 PDFशिवम् सुनील कुमारNoch keine Bewertungen
- ALL Minggu 5Dokument30 SeitenALL Minggu 5Yosua Feri WijayaNoch keine Bewertungen
- Exam Practice Math 2107Dokument3 SeitenExam Practice Math 2107wylenaNoch keine Bewertungen
- Linear Algebra A Gentle IntroductionDokument29 SeitenLinear Algebra A Gentle IntroductionRainingGirlNoch keine Bewertungen
- Linear Equation Matrices PDFDokument21 SeitenLinear Equation Matrices PDFVian RodriguezNoch keine Bewertungen
- Engineering CatDokument44 SeitenEngineering Catl7aniNoch keine Bewertungen
- CJR Aljabar LinearDokument11 SeitenCJR Aljabar LinearAnonymous 8cT9HsebytNoch keine Bewertungen
- 18.06 Spring 2012 - Problem Set 1Dokument2 Seiten18.06 Spring 2012 - Problem Set 1whoamiwaddup2345Noch keine Bewertungen
- Optimization Using Calculus: Convexity and Concavity of Functions of One and Two VariablesDokument22 SeitenOptimization Using Calculus: Convexity and Concavity of Functions of One and Two Variablesslv_prasaadNoch keine Bewertungen
- Mid Sem Merged MFDSDokument217 SeitenMid Sem Merged MFDSAditya K RNoch keine Bewertungen
- Analysis Total Found AnserDokument10 SeitenAnalysis Total Found Anserrajendhar VarmaNoch keine Bewertungen
- MT-1004 Linear Algebra NCEAC CS (Modified) Fall 2021Dokument6 SeitenMT-1004 Linear Algebra NCEAC CS (Modified) Fall 2021P200636 Muhammad RafayNoch keine Bewertungen
- Gradiant PDFDokument4 SeitenGradiant PDFMartinI.IseckNoch keine Bewertungen
- Subject Name: Digital Signal Processing Subject Code: 17EC52 Prepared By: Shima Ramesh, Prasanth Department: ECE Date: 25/09/2019Dokument23 SeitenSubject Name: Digital Signal Processing Subject Code: 17EC52 Prepared By: Shima Ramesh, Prasanth Department: ECE Date: 25/09/2019shimaNoch keine Bewertungen
- Linear Algebra With ApplicationsDokument1.032 SeitenLinear Algebra With ApplicationsAzima TarannumNoch keine Bewertungen
- Calculus With Vectors and MatricesDokument16 SeitenCalculus With Vectors and MatricesAnonymous Y2ibaULes1Noch keine Bewertungen
- BITS Pilani Presentation: Balram Dubey Department of MathematicsDokument23 SeitenBITS Pilani Presentation: Balram Dubey Department of MathematicsRashmitha RavichandranNoch keine Bewertungen
- LAB # 03 (Numerical Analysis)Dokument20 SeitenLAB # 03 (Numerical Analysis)Aabis AliNoch keine Bewertungen
- Induction MatrixDokument47 SeitenInduction MatrixSanjana KalanniNoch keine Bewertungen
- Finite Element Method: Lecture Module 2: Matrix AlgebraDokument41 SeitenFinite Element Method: Lecture Module 2: Matrix AlgebraSyamim HamizanNoch keine Bewertungen
- MatricesDokument12 SeitenMatricesgreg heffleyNoch keine Bewertungen
- Worksheet Matrix AlgebraDokument4 SeitenWorksheet Matrix AlgebraAnisha KamatNoch keine Bewertungen
- DetermineDokument29 SeitenDeterminePragya PanwarNoch keine Bewertungen
- Wavelet & Fourier Analysis On The ENSO and Monsoon Data in PythonDokument10 SeitenWavelet & Fourier Analysis On The ENSO and Monsoon Data in PythonTeto ScheduleNoch keine Bewertungen
- Matlab by Rajesh Bandari YadavDokument55 SeitenMatlab by Rajesh Bandari Yadavhyma kadakatla100% (2)
- Advanced Linear Algebra - Steven Roman-69-71Dokument3 SeitenAdvanced Linear Algebra - Steven Roman-69-71juan julcaNoch keine Bewertungen
- Discrete Time Fourier Transform (DTFT)Dokument50 SeitenDiscrete Time Fourier Transform (DTFT)Cassia LmtNoch keine Bewertungen
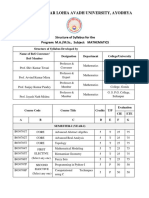
- RmlauDokument31 SeitenRmlauAbhinandanNoch keine Bewertungen
- Matrix Algebra and Random VectorsDokument37 SeitenMatrix Algebra and Random VectorsJonathan HuNoch keine Bewertungen
- Final Exam - Practice QuestionsDokument6 SeitenFinal Exam - Practice QuestionsShela RamosNoch keine Bewertungen
- Matrices: Numerical Solutions For Civil Engineers 2020Dokument25 SeitenMatrices: Numerical Solutions For Civil Engineers 2020Kristin Brienne Leander-RenomeronNoch keine Bewertungen