Das könnte Ihnen auch gefallen
- Debugging Systems-on-Chip: Communication-centric and Abstraction-based TechniquesVon EverandDebugging Systems-on-Chip: Communication-centric and Abstraction-based TechniquesNoch keine Bewertungen
- Design Automation of Cyber-Physical SystemsVon EverandDesign Automation of Cyber-Physical SystemsMohammad Abdullah Al FaruqueNoch keine Bewertungen
- Production Monitoring Based On Sensing Clamping Elements: SciencedirectDokument10 SeitenProduction Monitoring Based On Sensing Clamping Elements: SciencedirectFurxon JidokiNoch keine Bewertungen
- VSM 4 Plug-And-play Sensor Platform For Legacy Industrial Machine MonitoringDokument4 SeitenVSM 4 Plug-And-play Sensor Platform For Legacy Industrial Machine MonitoringElif CeylanNoch keine Bewertungen
- IJRET20160516038Dokument4 SeitenIJRET20160516038Youssef AliNoch keine Bewertungen
- Akash PPPP NewDokument7 SeitenAkash PPPP NewAkash AkuNoch keine Bewertungen
- Process OptimizationDokument17 SeitenProcess OptimizationshyamkohliNoch keine Bewertungen
- 10.Data-Driven Design of Fog Computing AidedDokument5 Seiten10.Data-Driven Design of Fog Computing AidedVenky Naidu BalineniNoch keine Bewertungen
- 2018 A Digital Light Processing 3D Printer For Fast and High-Precision Fabrication of Soft Pneumatic ActuatorsDokument8 Seiten2018 A Digital Light Processing 3D Printer For Fast and High-Precision Fabrication of Soft Pneumatic ActuatorsJack LeeNoch keine Bewertungen
- Research Paper On CNC Machine PDFDokument7 SeitenResearch Paper On CNC Machine PDFqdvtairif100% (1)
- Design in Context: Instruction IssueDokument12 SeitenDesign in Context: Instruction IssueMathieu GrinbergNoch keine Bewertungen
- McDonnell R - Control of A 3D Printer ExtruderDokument95 SeitenMcDonnell R - Control of A 3D Printer ExtruderRMDNoch keine Bewertungen
- Using 3D Printing Technology in Prototype ProductionDokument9 SeitenUsing 3D Printing Technology in Prototype Productionxuyan yinNoch keine Bewertungen
- Nozzle Arrangements by JakijakiDokument51 SeitenNozzle Arrangements by JakijakiSachinNoch keine Bewertungen
- In Situ Visual Quality Control in 3D PrintingDokument8 SeitenIn Situ Visual Quality Control in 3D PrintingShahrzad GhasemiNoch keine Bewertungen
- Digital ManufacturingDokument7 SeitenDigital ManufacturingAvik K DuttaNoch keine Bewertungen
- Digital Twin of An Intelligent Production Line With Adaptive Resource HandlingDokument7 SeitenDigital Twin of An Intelligent Production Line With Adaptive Resource HandlingmaniNoch keine Bewertungen
- Presented By: Kalpesh Shah M.E. (Design)Dokument40 SeitenPresented By: Kalpesh Shah M.E. (Design)Terminator941988Noch keine Bewertungen
- Master Thesis Ketan BavaliaDokument89 SeitenMaster Thesis Ketan Bavaliaxlrider530100% (1)
- US Online MonitoringDokument9 SeitenUS Online MonitoringYizz K.Noch keine Bewertungen
- Sciencedirect: Roadmap For Deploying Semantic GD&T in ManufacturingDokument4 SeitenSciencedirect: Roadmap For Deploying Semantic GD&T in ManufacturingmagicwaveNoch keine Bewertungen
- IJRPR12244Dokument7 SeitenIJRPR12244Sai AnirudhNoch keine Bewertungen
- PLCM, Module-5Dokument41 SeitenPLCM, Module-5Sunil Kumar M50% (2)
- Gridmpc: A Service-Oriented Grid Architecture For Coupling Simulation and Control of Industrial SystemsDokument8 SeitenGridmpc: A Service-Oriented Grid Architecture For Coupling Simulation and Control of Industrial SystemsIrfan Akbar BarbarossaNoch keine Bewertungen
- Applications of Digital TwinDokument34 SeitenApplications of Digital TwinParsaNoch keine Bewertungen
- GK FinalprojDokument30 SeitenGK FinalprojjulyNoch keine Bewertungen
- Computer-Aided Engineering (CAE) Is The Broad Usage of Computer Software To Aid inDokument6 SeitenComputer-Aided Engineering (CAE) Is The Broad Usage of Computer Software To Aid inamazon webserviceNoch keine Bewertungen
- Lasers in Industry 4 0Dokument6 SeitenLasers in Industry 4 0Hayet BoudjemaaNoch keine Bewertungen
- Sciencedirect: Manufacturing System On The Cloud: A Case Study On Cloud-Based Process PlanningDokument7 SeitenSciencedirect: Manufacturing System On The Cloud: A Case Study On Cloud-Based Process PlanningsadiksnmNoch keine Bewertungen
- Flux Analysis of Electromagnetics DevicesDokument12 SeitenFlux Analysis of Electromagnetics DevicesSilviu IlNoch keine Bewertungen
- Lean Data in Manufacturing Systems: Using Artificial Intelligence For Decentralized Data Reduction and Information ExtractionDokument6 SeitenLean Data in Manufacturing Systems: Using Artificial Intelligence For Decentralized Data Reduction and Information ExtractioncamiloagduNoch keine Bewertungen
- NW N AndroidDokument44 SeitenNW N AndroidPrathipa DeenaNoch keine Bewertungen
- 3D Printer Based Slot-Die Coater As A Lab-to-Fab Translation Tool For Solution-Processed Solar CellsDokument8 Seiten3D Printer Based Slot-Die Coater As A Lab-to-Fab Translation Tool For Solution-Processed Solar CellsBhabani Sankar SwainNoch keine Bewertungen
- Computer Aided ManufacturingDokument19 SeitenComputer Aided Manufacturingosmund147Noch keine Bewertungen
- Additive ManufacturingDokument26 SeitenAdditive ManufacturingSonia rajpuroitNoch keine Bewertungen
- Effect of ExtrusionProcess Parameters On Mechanial Properties of 3D Printed PLA ProductDokument8 SeitenEffect of ExtrusionProcess Parameters On Mechanial Properties of 3D Printed PLA ProductnanangasNoch keine Bewertungen
- Kalima Jogoo Women Group Management SystemDokument9 SeitenKalima Jogoo Women Group Management SystemtiffNoch keine Bewertungen
- PLM PDM CPCDokument8 SeitenPLM PDM CPCVijay RichardNoch keine Bewertungen
- Version Control System of CAD Documents and PLC PRDokument6 SeitenVersion Control System of CAD Documents and PLC PRgeorge stanley paceteNoch keine Bewertungen
- Rapid Prototyping PPTDokument17 SeitenRapid Prototyping PPTJoinal Hussain TapadarNoch keine Bewertungen
- CAD Model Generation Using 3D Scanning: Advanced Materials Research October 2007Dokument5 SeitenCAD Model Generation Using 3D Scanning: Advanced Materials Research October 2007kotes2007Noch keine Bewertungen
- Introduction To RPDDokument6 SeitenIntroduction To RPDAmeya BandekarNoch keine Bewertungen
- A Virtual Prototyping System For Rapid Product Development: S.H. Choi, A.M.M. ChanDokument12 SeitenA Virtual Prototyping System For Rapid Product Development: S.H. Choi, A.M.M. Chanbonmarche28Noch keine Bewertungen
- 2 SPE 92338 VHNav ZamoraDokument10 Seiten2 SPE 92338 VHNav ZamoraPT100% (1)
- Products Guide CRADLEDokument16 SeitenProducts Guide CRADLEdddidsNoch keine Bewertungen
- Additive Manufacturing ProcessesDokument27 SeitenAdditive Manufacturing ProcessesAizrul ShahNoch keine Bewertungen
- Bachelor Thesis 3d PrintingDokument4 SeitenBachelor Thesis 3d Printingfjnev0hc100% (2)
- Sensores Basilea SuizaDokument17 SeitenSensores Basilea SuizaXAILA ROB RONoch keine Bewertungen
- Condition-Based Maintenance: Model vs. Statistics A Performance ComparisonDokument7 SeitenCondition-Based Maintenance: Model vs. Statistics A Performance ComparisonLourds Egúsquiza EscuderoNoch keine Bewertungen
- Design of Fuzzy Adaptive Proportional Integral Derivative Controller For Networked Control System Using Switched Ethernet NetworkDokument13 SeitenDesign of Fuzzy Adaptive Proportional Integral Derivative Controller For Networked Control System Using Switched Ethernet NetworkMohamed RouaNoch keine Bewertungen
- Opc Ua ThesisDokument7 SeitenOpc Ua ThesisYasmine Anino100% (2)
- SPM ProjectDokument14 SeitenSPM ProjectIshwor NepalNoch keine Bewertungen
- SeminarDokument23 SeitenSeminarAchu KuttyNoch keine Bewertungen
- Factors Effecting Real-Time Optical Monitoring of Fused Filament 3D PrintingDokument17 SeitenFactors Effecting Real-Time Optical Monitoring of Fused Filament 3D PrintingShahrzad GhasemiNoch keine Bewertungen
- Virtual Instrumentation For Control Applications: Communications in Computer and Information Science March 2012Dokument13 SeitenVirtual Instrumentation For Control Applications: Communications in Computer and Information Science March 2012marco3000xxxNoch keine Bewertungen
- DaedDokument4 SeitenDaedErmias DjcuzoNoch keine Bewertungen
- Virtual Reality Is A Recent Trend in Mechanical and Electical Eng.Dokument8 SeitenVirtual Reality Is A Recent Trend in Mechanical and Electical Eng.sidra tulmuntahaNoch keine Bewertungen
- CSE 3D Printing ReportDokument18 SeitenCSE 3D Printing ReportAksh RawalNoch keine Bewertungen
- Payroll Management SystemDokument16 SeitenPayroll Management Systemphyllis MensahNoch keine Bewertungen
- Design for Testability, Debug and Reliability: Next Generation Measures Using Formal TechniquesVon EverandDesign for Testability, Debug and Reliability: Next Generation Measures Using Formal TechniquesNoch keine Bewertungen
- Embedded Active Vision System Based On An FPGA ArchitectureDokument14 SeitenEmbedded Active Vision System Based On An FPGA ArchitectureShahrzad GhasemiNoch keine Bewertungen
- TYPEDokument4 SeitenTYPEShahrzad GhasemiNoch keine Bewertungen
- 666666Dokument1 Seite666666Shahrzad GhasemiNoch keine Bewertungen
- UartDokument1 SeiteUartShahrzad GhasemiNoch keine Bewertungen
- HISTOGDokument1 SeiteHISTOGShahrzad GhasemiNoch keine Bewertungen
- PPPPPIDDokument2 SeitenPPPPPIDShahrzad GhasemiNoch keine Bewertungen
- Process Monitoringin 3 DPrintingDokument7 SeitenProcess Monitoringin 3 DPrintingShahrzad GhasemiNoch keine Bewertungen
- Programming For Engineers in Python: Recitation 12Dokument39 SeitenProgramming For Engineers in Python: Recitation 12Shahrzad GhasemiNoch keine Bewertungen
- The Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerDokument8 SeitenThe Algorithm Development and Implementation For 3D Printers Based On Adaptive PID ControllerShahrzad GhasemiNoch keine Bewertungen
- Multiplier-Less Hardware Realization of Trigonometric Functions For High Speed ApplicationsDokument5 SeitenMultiplier-Less Hardware Realization of Trigonometric Functions For High Speed ApplicationsShahrzad GhasemiNoch keine Bewertungen
- Codicology: Automated Analysis Using Python and OpencvDokument60 SeitenCodicology: Automated Analysis Using Python and OpencvShahrzad GhasemiNoch keine Bewertungen
- SciencedirectDokument6 SeitenSciencedirectShahrzad GhasemiNoch keine Bewertungen
- A Review On Quality Control in Additive Manufacturing: ArticleDokument27 SeitenA Review On Quality Control in Additive Manufacturing: ArticleShahrzad GhasemiNoch keine Bewertungen
- In Situ Visual Quality Control in 3D PrintingDokument8 SeitenIn Situ Visual Quality Control in 3D PrintingShahrzad GhasemiNoch keine Bewertungen
- New Text DocumentDokument1 SeiteNew Text DocumentShahrzad GhasemiNoch keine Bewertungen
- Codicology: Automated Analysis Using Python and OpencvDokument60 SeitenCodicology: Automated Analysis Using Python and OpencvShahrzad GhasemiNoch keine Bewertungen
- SciencedirectDokument6 SeitenSciencedirectShahrzad GhasemiNoch keine Bewertungen
- On-Line Detection of Defects in Layered Manufacturing: Is Use ADokument6 SeitenOn-Line Detection of Defects in Layered Manufacturing: Is Use AShahrzad GhasemiNoch keine Bewertungen
- 3 RedundantNumberDokument52 Seiten3 RedundantNumberShahrzad GhasemiNoch keine Bewertungen
- Arithmetic Chapter1Dokument47 SeitenArithmetic Chapter1Shahrzad GhasemiNoch keine Bewertungen
- FPGA-Based PID Controller ImplementationDokument20 SeitenFPGA-Based PID Controller ImplementationShahrzad GhasemiNoch keine Bewertungen
- Factors Effecting Real-Time Optical Monitoring of Fused Filament 3D PrintingDokument17 SeitenFactors Effecting Real-Time Optical Monitoring of Fused Filament 3D PrintingShahrzad GhasemiNoch keine Bewertungen
- اتمام فيلامنتDokument1 Seiteاتمام فيلامنتShahrzad GhasemiNoch keine Bewertungen
- Real-Time Image Histogram Equalization Using FPGADokument8 SeitenReal-Time Image Histogram Equalization Using FPGAShahrzad GhasemiNoch keine Bewertungen
- 1Dokument6 Seiten1Shahrzad GhasemiNoch keine Bewertungen
- An FPGA Implementation of A Flexible, Parallel Image Processing Architecture Suitable For Embedded Vision SystemsDokument6 SeitenAn FPGA Implementation of A Flexible, Parallel Image Processing Architecture Suitable For Embedded Vision SystemsShahrzad GhasemiNoch keine Bewertungen
- Chap2 PDFDokument23 SeitenChap2 PDFShahrzad GhasemiNoch keine Bewertungen
- Improving GPU Performance Via Large Warps and Two-Level Warp SchedulingDokument10 SeitenImproving GPU Performance Via Large Warps and Two-Level Warp SchedulingShahrzad GhasemiNoch keine Bewertungen
- مقاله اصلیDokument13 Seitenمقاله اصلیShahrzad GhasemiNoch keine Bewertungen
- Footwear Design in Fusion 360Dokument17 SeitenFootwear Design in Fusion 360TonyNoch keine Bewertungen
- Your House 3D Printed For The BirdsDokument7 SeitenYour House 3D Printed For The BirdsMaxmore KarumamupiyoNoch keine Bewertungen
- IMTMA Training CalendarDokument2 SeitenIMTMA Training Calendarashish shrivasNoch keine Bewertungen
- Volume IIIDokument1.145 SeitenVolume IIIathanasios niotisNoch keine Bewertungen
- An Introduction To Additive ManufacturingDokument20 SeitenAn Introduction To Additive ManufacturingankushNoch keine Bewertungen
- 1 s2.0 S2589234722001324 Main - 7Dokument32 Seiten1 s2.0 S2589234722001324 Main - 7mohammadNoch keine Bewertungen
- Min Than: Bachelor in Mechanical EngineeringDokument1 SeiteMin Than: Bachelor in Mechanical Engineeringapi-606470239Noch keine Bewertungen
- Asad Ghulam Ali (D)Dokument2 SeitenAsad Ghulam Ali (D)Asad AliNoch keine Bewertungen
- 3D Printing: A Seminar Report OnDokument19 Seiten3D Printing: A Seminar Report OnSidharth MethreNoch keine Bewertungen
- Major Project ReportDokument65 SeitenMajor Project ReportRahul LoharNoch keine Bewertungen
- Part Quality Documentation Guide - HP Jet Fusion 5200 Series 3D Printing SolutionDokument4 SeitenPart Quality Documentation Guide - HP Jet Fusion 5200 Series 3D Printing SolutionAlejandro Casal LagoNoch keine Bewertungen
- Design and Development of 3D Printer Filament ExtruderDokument2 SeitenDesign and Development of 3D Printer Filament ExtruderMahmoud EldesoukiNoch keine Bewertungen
- Xar104 Unit - Iii PDFDokument10 SeitenXar104 Unit - Iii PDFMouthiga ElumalaiNoch keine Bewertungen
- 3D Printed Tooling For Thermoforming of Medical DevicesDokument7 Seiten3D Printed Tooling For Thermoforming of Medical DevicesAlex BurdeNoch keine Bewertungen
- 03 - Topology Optimization For Additive Manufacturing As An Enabler For Light Weight Flight HardwareDokument22 Seiten03 - Topology Optimization For Additive Manufacturing As An Enabler For Light Weight Flight HardwareKalyude DiógenesNoch keine Bewertungen
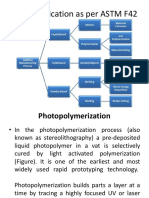
- AM Classification As Per ASTM F42Dokument19 SeitenAM Classification As Per ASTM F42RajijackNoch keine Bewertungen
- UntitledDokument16 SeitenUntitledMUNEEB AHMADNoch keine Bewertungen
- 3D Printing Guide For TeachersDokument59 Seiten3D Printing Guide For TeachersRui Teles Ese/IPPNoch keine Bewertungen
- Cincinnati Products CatalogDokument20 SeitenCincinnati Products CatalogJaime Villegas CruzNoch keine Bewertungen
- Mechanical Characterization of 3D Printed Samples Under VibrationDokument9 SeitenMechanical Characterization of 3D Printed Samples Under Vibrationatef.selmi01Noch keine Bewertungen
- Nanoscribe Training - QiangDokument9 SeitenNanoscribe Training - QiangHiba AljayuousiNoch keine Bewertungen
- Manual - AR2 Robot Arm AssemblyDokument67 SeitenManual - AR2 Robot Arm AssemblyMohammad NasutionNoch keine Bewertungen
- Additive Minds Academy Training Catalogue 03-20 enDokument36 SeitenAdditive Minds Academy Training Catalogue 03-20 enSagar DhageNoch keine Bewertungen
- Perspectives of 3D Printing Technology in Orthopaedic SurgeryDokument7 SeitenPerspectives of 3D Printing Technology in Orthopaedic SurgeryOstaz100% (1)
- Additive Manufacturing of Mechanically Isotropic Thin Films and Membranes Vía Microextrusion 3D Printing of Polymer SolutionsDokument10 SeitenAdditive Manufacturing of Mechanically Isotropic Thin Films and Membranes Vía Microextrusion 3D Printing of Polymer SolutionsCelia Miranda OportaNoch keine Bewertungen
- RPTDokument4 SeitenRPTSARAN PRASANTHNoch keine Bewertungen
- Special Report CHINA FOUNDRY The Role AnDokument12 SeitenSpecial Report CHINA FOUNDRY The Role AnSUNDRAMNAGANoch keine Bewertungen
- Ten Challenges in 3D Printing: William Oropallo Les A. PieglDokument14 SeitenTen Challenges in 3D Printing: William Oropallo Les A. PieglfreeroamNoch keine Bewertungen
- 10 1002@jbm A 36823Dokument14 Seiten10 1002@jbm A 36823Oxy Dental Clinic MakassarNoch keine Bewertungen
- 3dprinting at Gordon LibraryDokument1 Seite3dprinting at Gordon LibraryMatthew LinNoch keine Bewertungen