Das könnte Ihnen auch gefallen
- 2000 - Penzien - Seismically Induced Racking of Tunnel LiningsDokument9 Seiten2000 - Penzien - Seismically Induced Racking of Tunnel Liningspouya100% (1)
- ANSYS NeoHook UsermatDokument15 SeitenANSYS NeoHook UsermatRohan Nair100% (2)
- BARC Interview Experience (Mechanical) - How To Crack BARC Interview - GateGyanDokument2 SeitenBARC Interview Experience (Mechanical) - How To Crack BARC Interview - GateGyanjithinaravind007100% (1)
- Bowers MethodDokument18 SeitenBowers MethodEnrique Daniel Contreras AvilaNoch keine Bewertungen
- E060701020025 PDFDokument6 SeitenE060701020025 PDFمنير أحمدNoch keine Bewertungen
- Storage Tank MSC - NastranDokument5 SeitenStorage Tank MSC - NastrannavchakraNoch keine Bewertungen
- Shoshing Effect in TanksDokument7 SeitenShoshing Effect in Tankssaurabh singhNoch keine Bewertungen
- Sloshing Effects in Tanks Containing LiquidDokument8 SeitenSloshing Effects in Tanks Containing LiquidJohnny VillarroelNoch keine Bewertungen
- Wavelet-Based Non-Stationary Seismic Rocking Response of Exibly Supported Tanks GooodDokument25 SeitenWavelet-Based Non-Stationary Seismic Rocking Response of Exibly Supported Tanks Gooodmmoeini412002Noch keine Bewertungen
- 1983-Vibration Studies and Tests of Liquid Storage TanksDokument28 Seiten1983-Vibration Studies and Tests of Liquid Storage TanksbehzadNoch keine Bewertungen
- Liquid Sloshing in A Baffled Rectangular Tank Under Irregular Excitations 2023Dokument12 SeitenLiquid Sloshing in A Baffled Rectangular Tank Under Irregular Excitations 2023Suresh HubballiNoch keine Bewertungen
- Ki Anoush 2011Dokument15 SeitenKi Anoush 2011Eka Juliafad UNPNoch keine Bewertungen
- Mathematical Modelling and AnalysisDokument14 SeitenMathematical Modelling and AnalysisЕлена СтрельниковаNoch keine Bewertungen
- Chatterjee2006 PDFDokument10 SeitenChatterjee2006 PDFJhoselyn Rivera PerezNoch keine Bewertungen
- 06aug201706084607 Abhijeet Babar 758-763Dokument6 Seiten06aug201706084607 Abhijeet Babar 758-763tesNoch keine Bewertungen
- Seismic Analysis of Steel Cylindrical Liquid Storage Tank Using Coupled Acoustic-Structural Finite Element Method For Fluid-Structure InteractionDokument14 SeitenSeismic Analysis of Steel Cylindrical Liquid Storage Tank Using Coupled Acoustic-Structural Finite Element Method For Fluid-Structure Interactionavinash chechaniNoch keine Bewertungen
- Sloshing Displacements of An Above Ground Cylindrical Liquid Storage Tank Subjected To A Near-Fault Earthquake Ground MotionDokument7 SeitenSloshing Displacements of An Above Ground Cylindrical Liquid Storage Tank Subjected To A Near-Fault Earthquake Ground Motionrobinson RNoch keine Bewertungen
- Ocean Engineering: A C B A C A D e eDokument23 SeitenOcean Engineering: A C B A C A D e eFSilvaNoch keine Bewertungen
- Ijret - Effect of Free Surface Wave On Free Vibration of A Floating PlatformDokument5 SeitenIjret - Effect of Free Surface Wave On Free Vibration of A Floating PlatformInternational Journal of Research in Engineering and TechnologyNoch keine Bewertungen
- MARHY18 S26 Poonam Mohan PDFDokument8 SeitenMARHY18 S26 Poonam Mohan PDFPoonam MohanNoch keine Bewertungen
- CFD Letters2Dokument20 SeitenCFD Letters2Eswaran MuthaiahNoch keine Bewertungen
- Shafi Que 2016Dokument7 SeitenShafi Que 2016intaliallitaNoch keine Bewertungen
- Nonlinear Modelling of Liquid Sloshing in A Moving Rectangular TankDokument37 SeitenNonlinear Modelling of Liquid Sloshing in A Moving Rectangular TankFrancesco GuardiniNoch keine Bewertungen
- Mooring Analysis of A Floating OWC Wave Energy Converter: Marine Science and EngineeringDokument22 SeitenMooring Analysis of A Floating OWC Wave Energy Converter: Marine Science and Engineeringفاعل خيرNoch keine Bewertungen
- Application of Nonlinear Fluid-Structure Interaction Methods To Seismic Analysis of Anchored and Unanchored TanksDokument15 SeitenApplication of Nonlinear Fluid-Structure Interaction Methods To Seismic Analysis of Anchored and Unanchored TanksRAKSHITH NNoch keine Bewertungen
- Journal of Fluids and Structures: V.S. Sanapala, Rajkumar M, K. Velusamy, B.S.V. PatnaikDokument22 SeitenJournal of Fluids and Structures: V.S. Sanapala, Rajkumar M, K. Velusamy, B.S.V. PatnaikRajkumar MNoch keine Bewertungen
- Sloshing in A Vertical Circular Cylindrical Tank With An Annular Baf E. Part 1. Linear Fundamental SolutionsDokument18 SeitenSloshing in A Vertical Circular Cylindrical Tank With An Annular Baf E. Part 1. Linear Fundamental Solutions조기현Noch keine Bewertungen
- Tangent Hyperbolic Nanofluid SignificanceDokument14 SeitenTangent Hyperbolic Nanofluid SignificanceMuazzamNoch keine Bewertungen
- ProyectoDokument9 SeitenProyectoNicò SuarezNoch keine Bewertungen
- ACFrOgAhFbiyYPelIiyOI-D3Vp6Bk5hqs0vz3B2JavNSJCsN1H5bx5P2mcatw 8ojy xDeWw6uLXzl H0wgry9Z3MQc-NFw4WQ6o5rKERm Nh6hgcOysonQWrCj2OZt hmfLO4lMBM0uUiMRFxd6Dokument10 SeitenACFrOgAhFbiyYPelIiyOI-D3Vp6Bk5hqs0vz3B2JavNSJCsN1H5bx5P2mcatw 8ojy xDeWw6uLXzl H0wgry9Z3MQc-NFw4WQ6o5rKERm Nh6hgcOysonQWrCj2OZt hmfLO4lMBM0uUiMRFxd6Natália SantosNoch keine Bewertungen
- Kareem 1990 PDFDokument13 SeitenKareem 1990 PDFsukanya12345Noch keine Bewertungen
- 04 Chapter - Brijesh Singh & Pankaj AgarwalDokument17 Seiten04 Chapter - Brijesh Singh & Pankaj AgarwalSri E.Maheswar Reddy Assistant ProfessorNoch keine Bewertungen
- Jmse 10 01792 v2Dokument13 SeitenJmse 10 01792 v2ThiyagarajanNoch keine Bewertungen
- Retrofitting and Rehabilitation-3355Dokument11 SeitenRetrofitting and Rehabilitation-3355CRYSTAL JOY UYNoch keine Bewertungen
- Dynamic Responses of Marine Risers/Pipes Transporting Fluid Subject To Top End ExcitationsDokument9 SeitenDynamic Responses of Marine Risers/Pipes Transporting Fluid Subject To Top End ExcitationsadeshinexxNoch keine Bewertungen
- A Study On Free Vibration Under The Effect of Soil-Fluid-Structure Interaction On Concrete Gravity DamDokument7 SeitenA Study On Free Vibration Under The Effect of Soil-Fluid-Structure Interaction On Concrete Gravity Damdce_40Noch keine Bewertungen
- Nonlinear Analysis of A Dam-Reservoir-Foundation System Under Spatially Variable Seismic ExcitationsDokument8 SeitenNonlinear Analysis of A Dam-Reservoir-Foundation System Under Spatially Variable Seismic ExcitationsBagheri HessamNoch keine Bewertungen
- 2013 Dynamic Analysis of Flexible Rectangular Fluid Containers Subjected To Horizontal Ground Motion PDFDokument20 Seiten2013 Dynamic Analysis of Flexible Rectangular Fluid Containers Subjected To Horizontal Ground Motion PDFTuong BuiNoch keine Bewertungen
- 14.Eng-Analysis of Sloshing Impact - MuthuvijayDokument16 Seiten14.Eng-Analysis of Sloshing Impact - MuthuvijayImpact JournalsNoch keine Bewertungen
- Research Article: Experimental and Numerical Study of Stratified Sloshing in A Tank Under Horizontal ExcitationDokument14 SeitenResearch Article: Experimental and Numerical Study of Stratified Sloshing in A Tank Under Horizontal Excitationtravail compteNoch keine Bewertungen
- Seismic Induced Forces On Rigid Water Storage TanksDokument6 SeitenSeismic Induced Forces On Rigid Water Storage TanksChristian LeobreraNoch keine Bewertungen
- 2010 - Asme - Imece2010-39752 - Horizontal Cylindrical TankDokument8 Seiten2010 - Asme - Imece2010-39752 - Horizontal Cylindrical TankEswaran MuthaiahNoch keine Bewertungen
- Underwater Shock Response Analysis of A Floating VDokument8 SeitenUnderwater Shock Response Analysis of A Floating VgeppolaNoch keine Bewertungen
- Study of Seismic Analysis of Water Tank at Ground LevelDokument6 SeitenStudy of Seismic Analysis of Water Tank at Ground LevelAnonymous kw8Yrp0R5rNoch keine Bewertungen
- Dynamic Behavior of Flexible Rectangular Liquid Storage TanksDokument10 SeitenDynamic Behavior of Flexible Rectangular Liquid Storage Tanksy_fakoriNoch keine Bewertungen
- Hydrodynamic Interaction Between FLNG Vessel and LNG Carrier in Side by Side ConfigurationDokument10 SeitenHydrodynamic Interaction Between FLNG Vessel and LNG Carrier in Side by Side ConfigurationMohd Fouzi AbdullahNoch keine Bewertungen
- Top Roof Displacement of Elevated Water PDFDokument6 SeitenTop Roof Displacement of Elevated Water PDFhtrvcbfcscdNoch keine Bewertungen
- Nonlinear Analysis of Sloshing and Floating Body Coupled M - 2018 - Ocean EngineDokument17 SeitenNonlinear Analysis of Sloshing and Floating Body Coupled M - 2018 - Ocean EngineTuong BuiNoch keine Bewertungen
- Nonlinear Dynamic Analysis of Concrete Gravity Dams Considering Rotational Component of Ground MotionDokument14 SeitenNonlinear Dynamic Analysis of Concrete Gravity Dams Considering Rotational Component of Ground MotionBardalianNoch keine Bewertungen
- 23 PDFDokument12 Seiten23 PDFdce_40Noch keine Bewertungen
- Dynamic Analysis of Dam-Reservoir-Intake Tower Considering Sediments AbsorptionDokument9 SeitenDynamic Analysis of Dam-Reservoir-Intake Tower Considering Sediments AbsorptionAdnan AdilNoch keine Bewertungen
- Comparison of Base-Isolated Liquid Storage Tank Models Under Bi-Directional EarthquakesDokument11 SeitenComparison of Base-Isolated Liquid Storage Tank Models Under Bi-Directional EarthquakesebherlinNoch keine Bewertungen
- Jpvtas 130 4 41801 1Dokument13 SeitenJpvtas 130 4 41801 1Julio Andrés Casal RamosNoch keine Bewertungen
- Magnetohydrodynamics Instability of Interfacial Waves Between Two Immiscible Incompressible Cylindrical FluidsDokument18 SeitenMagnetohydrodynamics Instability of Interfacial Waves Between Two Immiscible Incompressible Cylindrical FluidsSrinivas JangiliNoch keine Bewertungen
- Project Work: Title: Sloshing Dynamics in Wave TanksDokument10 SeitenProject Work: Title: Sloshing Dynamics in Wave TanksSaiarpan V JoshiNoch keine Bewertungen
- Sloshing 2005Dokument12 SeitenSloshing 2005Matej TomićNoch keine Bewertungen
- Structural Analysis of Deep Water Offshore Structures Part 2Dokument3 SeitenStructural Analysis of Deep Water Offshore Structures Part 2Claudia Lemos RochaNoch keine Bewertungen
- Fluid-Soil-Structure Interaction Phenomena On Vibration Case at Pump Station BuildingDokument8 SeitenFluid-Soil-Structure Interaction Phenomena On Vibration Case at Pump Station BuildingHendri HermawanNoch keine Bewertungen
- Vibration Analysis of Rectangular Plates Coupled With Uid: Y. Kerboua, A.A. Lakis, M. Thomas, L. MarcouillerDokument17 SeitenVibration Analysis of Rectangular Plates Coupled With Uid: Y. Kerboua, A.A. Lakis, M. Thomas, L. MarcouilleryohannesNoch keine Bewertungen
- Numerical Simulation of Sloshing Phenomena in Cubi PDFDokument22 SeitenNumerical Simulation of Sloshing Phenomena in Cubi PDFkaviraj TukhooNoch keine Bewertungen
- Ijsrdv4i30661 PDFDokument5 SeitenIjsrdv4i30661 PDFLakshmi PrabhaNoch keine Bewertungen
- 2.c.hussien Et Al. (2016)Dokument10 Seiten2.c.hussien Et Al. (2016)Aniruddha BhaduriNoch keine Bewertungen
- Dynamic Responses of Marine RisersPipesDokument9 SeitenDynamic Responses of Marine RisersPipesRajeuv GovindanNoch keine Bewertungen
- Catt Registration Form: Municipal MembershipDokument1 SeiteCatt Registration Form: Municipal MembershippouyaNoch keine Bewertungen
- Waterproofing: Sikafuko® Injection Hose SystemsDokument8 SeitenWaterproofing: Sikafuko® Injection Hose SystemspouyaNoch keine Bewertungen
- OPSS 1854 Apr18 NOTICE TO USERSDokument1 SeiteOPSS 1854 Apr18 NOTICE TO USERSpouyaNoch keine Bewertungen
- 571 Bfe 5 Ad 557 FD 1 Da 3 Aa 81 C 48Dokument16 Seiten571 Bfe 5 Ad 557 FD 1 Da 3 Aa 81 C 48pouyaNoch keine Bewertungen
- Anchorless Circular Formwork With GRV Articulated WalersDokument32 SeitenAnchorless Circular Formwork With GRV Articulated WalerspouyaNoch keine Bewertungen
- Maximo: Panel Formwork With Single-Sided MX Tie TechnologyDokument44 SeitenMaximo: Panel Formwork With Single-Sided MX Tie TechnologypouyaNoch keine Bewertungen
- 2005 - Javier Avilés - Influence of Foundation Flexibility On RM and CM FactorsDokument10 Seiten2005 - Javier Avilés - Influence of Foundation Flexibility On RM and CM FactorspouyaNoch keine Bewertungen
- 1995 - Stamos - Dynamic Analysis of Large 3-D Underground Structures by The BEMDokument18 Seiten1995 - Stamos - Dynamic Analysis of Large 3-D Underground Structures by The BEMpouyaNoch keine Bewertungen
- 2002 - Ghiocel - Stochastic Finite-Element Analysis of Seismic Soil-Structure InteractionDokument12 Seiten2002 - Ghiocel - Stochastic Finite-Element Analysis of Seismic Soil-Structure InteractionpouyaNoch keine Bewertungen
- Sika® Latex R: Acrylic Latex, Bonding Agent and Admixture For Cement Mortar and ConcreteDokument2 SeitenSika® Latex R: Acrylic Latex, Bonding Agent and Admixture For Cement Mortar and ConcretepouyaNoch keine Bewertungen
- 1985 - Trautmann - Lateral Force-Displacement Response of Buried PipeDokument16 Seiten1985 - Trautmann - Lateral Force-Displacement Response of Buried PipepouyaNoch keine Bewertungen
- 1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEDokument16 Seiten1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEpouyaNoch keine Bewertungen
- SB Brace Frame: Reliable Load Transfer For Single-Sided Forming Operations Up To 8.75 M HighDokument48 SeitenSB Brace Frame: Reliable Load Transfer For Single-Sided Forming Operations Up To 8.75 M HighpouyaNoch keine Bewertungen
- 2013 - Vladimir Vukobratović - A Simplified Seismic Analysis of Circular Liquid Storage TanksDokument6 Seiten2013 - Vladimir Vukobratović - A Simplified Seismic Analysis of Circular Liquid Storage TankspouyaNoch keine Bewertungen
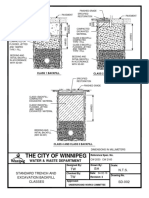
- The City of Winnipeg: Water & Waste DepartmentDokument1 SeiteThe City of Winnipeg: Water & Waste DepartmentpouyaNoch keine Bewertungen
- GT 24 Formwork Girder: The Versatile Lattice Girder With A High Load-Bearing CapacityDokument20 SeitenGT 24 Formwork Girder: The Versatile Lattice Girder With A High Load-Bearing CapacitypouyaNoch keine Bewertungen
- Use of Controlled Low-Strength Material (CLSM) As Controlled FillDokument2 SeitenUse of Controlled Low-Strength Material (CLSM) As Controlled FillpouyaNoch keine Bewertungen
- Hilti Technical BulletinDokument9 SeitenHilti Technical BulletinpouyaNoch keine Bewertungen
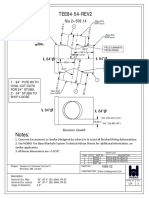
- Tee84 54 Rev2Dokument1 SeiteTee84 54 Rev2pouyaNoch keine Bewertungen
- Developed by Ce.A.S. SRL, Italy and Deep Excavation LLC, U.S.ADokument19 SeitenDeveloped by Ce.A.S. SRL, Italy and Deep Excavation LLC, U.S.ApouyaNoch keine Bewertungen
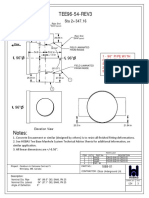
- Tee96 54 Rev3Dokument1 SeiteTee96 54 Rev3pouyaNoch keine Bewertungen
- Commento-Risultati-Calcolo Rev01 EngDokument9 SeitenCommento-Risultati-Calcolo Rev01 EngpouyaNoch keine Bewertungen
- Process Intensification in Stirred Tanks - Wu - 2012Dokument8 SeitenProcess Intensification in Stirred Tanks - Wu - 2012meyli80Noch keine Bewertungen
- Die Design Fundamentals by PaquinDokument4 SeitenDie Design Fundamentals by PaquinJayesh NairNoch keine Bewertungen
- Gas Production OperationsDokument333 SeitenGas Production Operationsmarzinus0% (1)
- NR 410305 Refrigeration and Air ConditioningDokument5 SeitenNR 410305 Refrigeration and Air ConditioningSrinivasa Rao GNoch keine Bewertungen
- Practica de Lugeon Cap. VDokument7 SeitenPractica de Lugeon Cap. VKarl MejíaNoch keine Bewertungen
- Module 5: Failure Criteria of Rock and Rock Masses: 5.4.3 Hoek and Brown CriterionDokument8 SeitenModule 5: Failure Criteria of Rock and Rock Masses: 5.4.3 Hoek and Brown Criterionفردوس سليمانNoch keine Bewertungen
- Objective QuestionsDokument2 SeitenObjective QuestionsZaffu Zealy100% (2)
- Ib Tutorial 4 (12 13) Sem 2Dokument5 SeitenIb Tutorial 4 (12 13) Sem 2omarnasriNoch keine Bewertungen
- LN2 GeneratorDokument2 SeitenLN2 GeneratorYasir AliNoch keine Bewertungen
- Electrical Shutdown File Dated 06.08.2022Dokument30 SeitenElectrical Shutdown File Dated 06.08.2022bsrchandruNoch keine Bewertungen
- Part 03 Continuum MechanicsDokument75 SeitenPart 03 Continuum Mechanicszakariyae el mourabitNoch keine Bewertungen
- Air Drying by Pressure Swing Adsorption - Chihara-SuzukiDokument7 SeitenAir Drying by Pressure Swing Adsorption - Chihara-SuzukiAndri SaputraNoch keine Bewertungen
- Investigation On A Multispar Composite WingDokument9 SeitenInvestigation On A Multispar Composite Wingjcdt94Noch keine Bewertungen
- Assignment For CLO2 and CLO3Dokument3 SeitenAssignment For CLO2 and CLO3S.M Umer SiddiquiNoch keine Bewertungen
- Numerical Investigation of Fan Performance in A Forced Draft Air-Cooled Steam CondenserDokument7 SeitenNumerical Investigation of Fan Performance in A Forced Draft Air-Cooled Steam CondenserYanan CamarazaNoch keine Bewertungen
- Thermal Energy Storage and Sensibile Energy StorageDokument30 SeitenThermal Energy Storage and Sensibile Energy StoragesayoojNoch keine Bewertungen
- Evaporation Cooling Thermocompressor DesignDokument9 SeitenEvaporation Cooling Thermocompressor DesignKailas NimbalkarNoch keine Bewertungen
- Problem Explanation - 09-24-2010Dokument2 SeitenProblem Explanation - 09-24-2010King OfheartsNoch keine Bewertungen
- Fluid Mechanics UNIT-1 (Part-1)Dokument32 SeitenFluid Mechanics UNIT-1 (Part-1)Achyutha AnilNoch keine Bewertungen
- Tutorial 1-1Dokument18 SeitenTutorial 1-1dhogalaNoch keine Bewertungen
- Specifications & Typical Properties For Motiva Base OilsDokument1 SeiteSpecifications & Typical Properties For Motiva Base OilsMassimiliano VolaNoch keine Bewertungen
- Uenr5152uenr5152 SisDokument2 SeitenUenr5152uenr5152 Sisrigoberto otinianoNoch keine Bewertungen
- Propriedades Do Helio Liquido PDFDokument46 SeitenPropriedades Do Helio Liquido PDFPedro von SydowNoch keine Bewertungen
- ME 423 Finals Formula SheetDokument2 SeitenME 423 Finals Formula SheetNicolai CeloNoch keine Bewertungen
- Vapor Compression Refrigeration CyclesDokument9 SeitenVapor Compression Refrigeration Cycleszakariya1989Noch keine Bewertungen
- Tunnel Face StabilityDokument207 SeitenTunnel Face Stabilityhutuguo100% (2)
- Pas Hink in 2003Dokument16 SeitenPas Hink in 2003石皓瑋Noch keine Bewertungen