Das könnte Ihnen auch gefallen
- Introduction A L-Electronique AnalogiqueDokument258 SeitenIntroduction A L-Electronique AnalogiqueHajar Berrada89% (9)
- 15 Exercices Corrigés Sur La Machine À Courant ContinuDokument31 Seiten15 Exercices Corrigés Sur La Machine À Courant Continuzakaria ziko Z95% (42)
- TD GrafcetDokument10 SeitenTD GrafcetMaissa Messi67% (3)
- Midi Plein Introduction A La Pensee Maconnique PDF PreviewDokument38 SeitenMidi Plein Introduction A La Pensee Maconnique PDF PreviewMompoint HenockNoch keine Bewertungen
- Cahier de Charger Automat Corrige Ouchada AbdelhadiDokument90 SeitenCahier de Charger Automat Corrige Ouchada AbdelhadiEl mrtb hamza100% (4)
- Exercices Sur Le GrafcetDokument7 SeitenExercices Sur Le GrafcetEcouter le français100% (3)
- Tele 7 Jeux - Octobre 2018 PDFDokument100 SeitenTele 7 Jeux - Octobre 2018 PDFfanny de los angeles martinez caleroNoch keine Bewertungen
- Corrigé Exercice Grafcet MedDokument3 SeitenCorrigé Exercice Grafcet Meduser2014523100% (1)
- Exercice Corrigé Grafcet Plateau TournantDokument2 SeitenExercice Corrigé Grafcet Plateau TournantAhmed BidAr67% (6)
- Ds Automatisme JuinDokument3 SeitenDs Automatisme JuinAmira Warhéni100% (1)
- Poly TD API PDFDokument10 SeitenPoly TD API PDFKhadija HajadeNoch keine Bewertungen
- Boite de Vitesses Robotisee Sensodrive de c3Dokument5 SeitenBoite de Vitesses Robotisee Sensodrive de c3aymendabNoch keine Bewertungen
- Eurocode 2Dokument5 SeitenEurocode 2Sylvain AbissiNoch keine Bewertungen
- AutomatikDokument7 SeitenAutomatikMustapha Fagrouch100% (1)
- Grafcet Avec Choix de Séquences Exercices Corrigés - CopieDokument22 SeitenGrafcet Avec Choix de Séquences Exercices Corrigés - CopieAris ABOUGHENoch keine Bewertungen
- Exos GrafcetDokument26 SeitenExos GrafcetRuben Yav100% (2)
- Guide GESIP 2008 01 EDD - Rev 2019 - Version Du 19 Juillet 2019 BSERRDokument118 SeitenGuide GESIP 2008 01 EDD - Rev 2019 - Version Du 19 Juillet 2019 BSERRKais Messaoudi100% (1)
- Construire Un Projet de Recherche en Sciences Humaines Et Sociales - Une Procédure de Mise en Lien (Grinschpoun, Marie-France (Grinschpoun Etc.) (Z-Library)Dokument60 SeitenConstruire Un Projet de Recherche en Sciences Humaines Et Sociales - Une Procédure de Mise en Lien (Grinschpoun, Marie-France (Grinschpoun Etc.) (Z-Library)Dieudonné Faraja Chris MkangyaNoch keine Bewertungen
- TD N2 AutomatismeDokument4 SeitenTD N2 AutomatismeYouness Bakache100% (4)
- TD2Dokument4 SeitenTD2Abdallah Grima33% (3)
- TD2 Gemma PDFDokument3 SeitenTD2 Gemma PDFyousef ouasfia100% (1)
- DSC1 2ste Atc 2016 2017 Lavage Automatique de VehiculesDokument8 SeitenDSC1 2ste Atc 2016 2017 Lavage Automatique de Vehiculesismail elmoufakir100% (3)
- Plan Marketing StratégiqueDokument276 SeitenPlan Marketing StratégiqueR100% (1)
- TD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFDokument4 SeitenTD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFEdmond OuattaraNoch keine Bewertungen
- 03 Chapitre 1Dokument5 Seiten03 Chapitre 1Firas FirasNoch keine Bewertungen
- Gabarits Principes FondamenteauxDokument14 SeitenGabarits Principes FondamenteauxCan AydoğmuşNoch keine Bewertungen
- Exo GrafcetDokument3 SeitenExo GrafcetSkimoghjNoch keine Bewertungen
- TD AutomatismesDokument8 SeitenTD AutomatismesFarah MelkiNoch keine Bewertungen
- Grafcet Avex Correction - 1Dokument34 SeitenGrafcet Avex Correction - 1Fettah Guarnaoui100% (3)
- Correction TD Chariot - Chargement de Sable PDFDokument5 SeitenCorrection TD Chariot - Chargement de Sable PDFEdmond OuattaraNoch keine Bewertungen
- Cours EN310 Communication Numérique AvancéeDokument141 SeitenCours EN310 Communication Numérique AvancéeAbdallah Toolmaker100% (3)
- TP Auto PercageDokument21 SeitenTP Auto PercagekaoutarNoch keine Bewertungen
- CC Automatisme3 BTSCMFM2Dokument5 SeitenCC Automatisme3 BTSCMFM2stephaneNoch keine Bewertungen
- Séries de TD 2024Dokument12 SeitenSéries de TD 2024adel.ghanemNoch keine Bewertungen
- Sujets Exam AutoDokument3 SeitenSujets Exam AutoFth WalterNoch keine Bewertungen
- Eps Ii 1Dokument12 SeitenEps Ii 1Albertø Là VïtëssëNoch keine Bewertungen
- Mini-Projet Automatisme Séquentiel SR4Dokument9 SeitenMini-Projet Automatisme Séquentiel SR4mohamed lachhabNoch keine Bewertungen
- td3 2Dokument8 Seitentd3 2Toudouft HamzaNoch keine Bewertungen
- Les 3 TD ApiDokument3 SeitenLes 3 TD ApiJiba LassryNoch keine Bewertungen
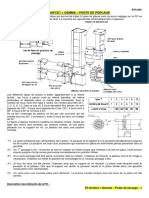
- 12-TD G7 + GEMMA Poste de PerçageDokument3 Seiten12-TD G7 + GEMMA Poste de PerçageursulaahoulahouNoch keine Bewertungen
- Serie 2A Programmation-LadderDokument3 SeitenSerie 2A Programmation-LadderfahssimeriemNoch keine Bewertungen
- Grafcet5 ParallelismeDokument7 SeitenGrafcet5 Parallelismegamerzxs681Noch keine Bewertungen
- TD CpiDokument6 SeitenTD CpiPatrick Juvet Gnetchejo100% (1)
- td1 AutomatismeDokument6 Seitentd1 AutomatismeDhoha GasmiaNoch keine Bewertungen
- Laboratoire 2 GPA 140 Lingenieur en ProdDokument6 SeitenLaboratoire 2 GPA 140 Lingenieur en Prodtimo timoNoch keine Bewertungen
- Poly TD SAPDokument18 SeitenPoly TD SAPOussama BeddaNoch keine Bewertungen
- td2 Grafcet 115416Dokument6 Seitentd2 Grafcet 115416boooy179Noch keine Bewertungen
- Exercices de GrafcetDokument3 SeitenExercices de Grafcetsalimiyouness0% (1)
- Degraissage CorrectionDokument5 SeitenDegraissage CorrectionMohamed Soibaha ChaambaneNoch keine Bewertungen
- Automatismes Industriels CC 2015 2016Dokument5 SeitenAutomatismes Industriels CC 2015 2016Youssef RagraguiNoch keine Bewertungen
- Épreuve de Synthèse D'automatique 2002-2003Dokument7 SeitenÉpreuve de Synthèse D'automatique 2002-2003Nourallah AouinaNoch keine Bewertungen
- Exercice Grafcet ApiDokument4 SeitenExercice Grafcet Apihammardjamel.0Noch keine Bewertungen
- TD 3 Automatismes IndustrielsDokument2 SeitenTD 3 Automatismes IndustrielsBIJOUNA BILELNoch keine Bewertungen
- Cours PaletiseuseDokument31 SeitenCours PaletiseuseThierry LAMBOTTENoch keine Bewertungen
- DOSSIER TECHNIQUE. Système Automatisé FESTO - 1 - PDF Téléchargement GratuitDokument22 SeitenDOSSIER TECHNIQUE. Système Automatisé FESTO - 1 - PDF Téléchargement GratuitNothaßan Berry100% (1)
- Examens National 2bac Ste Sci Ingen 2010 N PDFDokument30 SeitenExamens National 2bac Ste Sci Ingen 2010 N PDFHanane TounsiNoch keine Bewertungen
- Chapitre 2Dokument6 SeitenChapitre 2rawdhajarray2000Noch keine Bewertungen
- Sap - 2013 - Sujet BTSDokument8 SeitenSap - 2013 - Sujet BTSagvv6886Noch keine Bewertungen
- Contrôle_GrafcetDokument3 SeitenContrôle_GrafcetAchrafNoch keine Bewertungen
- Poste Automatique de Peinture de Paraboles1Dokument5 SeitenPoste Automatique de Peinture de Paraboles1Badreddine KraiemNoch keine Bewertungen
- TD - GRAFCET - TextMarkDokument36 SeitenTD - GRAFCET - TextMarkWafa BenzaouiNoch keine Bewertungen
- TP6 Sy08Dokument8 SeitenTP6 Sy08Alicia BoulléeNoch keine Bewertungen
- Correctiontd1 Api21Dokument49 SeitenCorrectiontd1 Api21Amira Jbeli100% (2)
- TP2 automatismeLAIIDokument6 SeitenTP2 automatismeLAIIfakhri menjliNoch keine Bewertungen
- GrafcetDokument2 SeitenGrafcetYassine Abouelhouda80% (5)
- Machine de Conditionnement de ComprimesDokument18 SeitenMachine de Conditionnement de ComprimesRedOne Khasmi50% (2)
- TD Grafcet 2Dokument3 SeitenTD Grafcet 2Fadwa GHANINoch keine Bewertungen
- Station de RemplissageDokument24 SeitenStation de Remplissagejunior Ngoyo0% (1)
- Lettre Circulaire Conjointe VFDokument2 SeitenLettre Circulaire Conjointe VFEdmond OuattaraNoch keine Bewertungen
- Declaration FinaleDokument9 SeitenDeclaration FinaleEzechiel OuedraogoNoch keine Bewertungen
- TP Porte Garage PDFDokument4 SeitenTP Porte Garage PDFEdmond Ouattara0% (1)
- Correction TD Chariot - Chargement de Sable PDFDokument5 SeitenCorrection TD Chariot - Chargement de Sable PDFEdmond OuattaraNoch keine Bewertungen
- Eva8 ApiDokument5 SeitenEva8 ApiEdmond OuattaraNoch keine Bewertungen
- Ci7 TD1Dokument6 SeitenCi7 TD1Toky Fanambinana RanaivoarisoaNoch keine Bewertungen
- Eva7 Grafcet Et ApiDokument5 SeitenEva7 Grafcet Et ApiEdmond OuattaraNoch keine Bewertungen
- Attoui Aimen Abed El Aziz PDFDokument92 SeitenAttoui Aimen Abed El Aziz PDFEdmond OuattaraNoch keine Bewertungen
- Correction TD Chariot - Chargement de Sable PDFDokument5 SeitenCorrection TD Chariot - Chargement de Sable PDFEdmond OuattaraNoch keine Bewertungen
- Grafcet PDFDokument49 SeitenGrafcet PDFEdmond OuattaraNoch keine Bewertungen
- TP3 211Dokument6 SeitenTP3 211jamazaNoch keine Bewertungen
- 1.cours TD MCC LightDokument39 Seiten1.cours TD MCC LightYesmaRofiaNoch keine Bewertungen
- TD7 PDFDokument2 SeitenTD7 PDFMohammed MamdouhNoch keine Bewertungen
- Eva8 ApiDokument5 SeitenEva8 ApiEdmond OuattaraNoch keine Bewertungen
- TD Auto 2 PDFDokument16 SeitenTD Auto 2 PDFEdmond OuattaraNoch keine Bewertungen
- Grafcet PDFDokument49 SeitenGrafcet PDFEdmond OuattaraNoch keine Bewertungen
- Correction TD Chariot - Chargement de Sable PDFDokument5 SeitenCorrection TD Chariot - Chargement de Sable PDFEdmond OuattaraNoch keine Bewertungen
- Exos g7Dokument4 SeitenExos g7Roman Sarmiento GomezNoch keine Bewertungen
- Automatismes Et Informatique IndustrielleDokument2 SeitenAutomatismes Et Informatique IndustrielleDiaa Eddine Boudiaf100% (2)
- TD4 Auto Grafcet Percage Automatise DT PDFDokument29 SeitenTD4 Auto Grafcet Percage Automatise DT PDFElhanafi OuatahNoch keine Bewertungen
- TP Porte Garage PDFDokument4 SeitenTP Porte Garage PDFEdmond Ouattara0% (1)
- 11 G7 Chariot Eleve PDFDokument12 Seiten11 G7 Chariot Eleve PDFEdmond OuattaraNoch keine Bewertungen
- Grafcet PDFDokument49 SeitenGrafcet PDFEdmond OuattaraNoch keine Bewertungen
- m2102 Autom Serie TP PDFDokument40 Seitenm2102 Autom Serie TP PDFEdmond OuattaraNoch keine Bewertungen
- TD4 Auto Grafcet Percage Automatise Eleve PDFDokument11 SeitenTD4 Auto Grafcet Percage Automatise Eleve PDFEdmond OuattaraNoch keine Bewertungen
- Sujet À Imprimer Optimisation ENSA BERCHIDDokument11 SeitenSujet À Imprimer Optimisation ENSA BERCHIDYounes OuadoudNoch keine Bewertungen
- Exercice Chapitre 5 Et 6 Enonce Avec Place Pour RepondreDokument17 SeitenExercice Chapitre 5 Et 6 Enonce Avec Place Pour RepondreInconnuNoch keine Bewertungen
- Exercice Pince SchraderDokument3 SeitenExercice Pince SchraderCédric SorghoNoch keine Bewertungen
- MEC6215 - FRE - 04-02 - Instructions À Propos Des Rapports-1Dokument16 SeitenMEC6215 - FRE - 04-02 - Instructions À Propos Des Rapports-1Exion GroupNoch keine Bewertungen
- TS Cours SuitesDokument10 SeitenTS Cours SuitesGerardo GeusaNoch keine Bewertungen
- LA Metro - 711Dokument4 SeitenLA Metro - 711cartographicaNoch keine Bewertungen
- 2-Electrophysiologie CardiaqueDokument8 Seiten2-Electrophysiologie CardiaqueImene BenzianeNoch keine Bewertungen
- 2 Chapitre1Dokument5 Seiten2 Chapitre1Mouad AliouaNoch keine Bewertungen
- Chapitre 3 Terpenes PDFDokument10 SeitenChapitre 3 Terpenes PDFmohammed safouNoch keine Bewertungen
- PressedDokument5 SeitenPressedابتسم للدنياNoch keine Bewertungen
- Sur La Limite D'une Composition de Deux FonctionsDokument2 SeitenSur La Limite D'une Composition de Deux FonctionsWarda Jory100% (1)
- La Lumiere Et Sa PropagationDokument9 SeitenLa Lumiere Et Sa Propagationraslenbouallegue12345Noch keine Bewertungen
- TP1 LagrangeDokument4 SeitenTP1 LagrangeOuijdane MaaNoch keine Bewertungen
- Electronique Et Loisirs 054 - 2003 - NovembreDokument80 SeitenElectronique Et Loisirs 054 - 2003 - NovembreIkram Ikram100% (1)
- Plan D'appro Rev00Dokument5 SeitenPlan D'appro Rev00Marwen MethenniNoch keine Bewertungen
- Uc500e FRDokument2 SeitenUc500e FRmed100% (1)
- TD 4Dokument2 SeitenTD 4Fatis QueenNoch keine Bewertungen
- Ix35 NoticeDokument440 SeitenIx35 NoticeFodil ZouNoch keine Bewertungen
- Guide de Maintenance CourroiesDokument15 SeitenGuide de Maintenance CourroiesJamel CharefNoch keine Bewertungen
- 2QA 6 016 05-Huile HydrauliqueDokument5 Seiten2QA 6 016 05-Huile Hydrauliqueoussama merNoch keine Bewertungen