Das könnte Ihnen auch gefallen
- CNC 2008Dokument33 SeitenCNC 2008Abdelhadi AZNoch keine Bewertungen
- TP3-6a PerageDokument1 SeiteTP3-6a PeragebaskourNoch keine Bewertungen
- Freins CoursDokument3 SeitenFreins CoursYoù NəssNoch keine Bewertungen
- 10078-5-Tp-Levee-Soupape-Etude-Poussoir 3Dokument12 Seiten10078-5-Tp-Levee-Soupape-Etude-Poussoir 3Netero 94Noch keine Bewertungen
- Polycopie de TD 2013Dokument70 SeitenPolycopie de TD 2013hichamkabel100% (1)
- TPstatiquePilote 2006Dokument6 SeitenTPstatiquePilote 2006dfffeNoch keine Bewertungen
- Le Montage D'usinage Corrigé PDFDokument4 SeitenLe Montage D'usinage Corrigé PDFD. n50% (2)
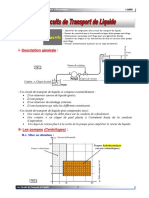
- Chap2 Les Circuits de Transport de LiquideDokument17 SeitenChap2 Les Circuits de Transport de LiquideAla Massoudi100% (1)
- Fascicule TP Hydraulique PneumatiqueDokument14 SeitenFascicule TP Hydraulique Pneumatiqueshayma MensiNoch keine Bewertungen
- TD 01 - Analyse FonctionnelleDokument10 SeitenTD 01 - Analyse Fonctionnellebhs channel100% (1)
- Cours Systemes de Transmission de MouvementDokument5 SeitenCours Systemes de Transmission de MouvementdjalikadjouNoch keine Bewertungen
- Fonctionnement de La Pompe PDFDokument11 SeitenFonctionnement de La Pompe PDFhelmi1924Noch keine Bewertungen
- dcn3 3t2 Dispositif D Entrainement CorrectionDokument4 Seitendcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDokument8 SeitenSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkNoch keine Bewertungen
- TD Grafcet Yaourt Taches-ConvertiDokument6 SeitenTD Grafcet Yaourt Taches-ConvertiMohamedNoch keine Bewertungen
- Correcteur de Freinage Asservi À La Charge (LSV) 475 71.: ApplicationDokument32 SeitenCorrecteur de Freinage Asservi À La Charge (LSV) 475 71.: ApplicationAmine DhahriNoch keine Bewertungen
- Document réponseMPDokument2 SeitenDocument réponseMPDouas MohamedNoch keine Bewertungen
- Chapitre 1Dokument38 SeitenChapitre 1Jasmin D'hiverNoch keine Bewertungen
- TD Grafcet Yaourt TachesDokument6 SeitenTD Grafcet Yaourt TachesKacimi Soufyane33% (3)
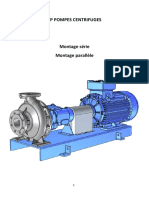
- TP Pompes Centrifuges Montage en Série Et Montage en ParallèleDokument16 SeitenTP Pompes Centrifuges Montage en Série Et Montage en ParallèleZãķařią Bíżri100% (1)
- Corriges ENGA2021Dokument35 SeitenCorriges ENGA2021Marona GIRABINoch keine Bewertungen
- Travail Demande 2016 28 4 2017Dokument4 SeitenTravail Demande 2016 28 4 2017Crazy ytNoch keine Bewertungen
- 2020 Normal SoirDokument14 Seiten2020 Normal SoirAbdelhadi AZNoch keine Bewertungen
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Dokument10 SeitenDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoNoch keine Bewertungen
- MecaniqueDokument20 SeitenMecaniqueamino87Noch keine Bewertungen
- TD N°10 1CPI Statique AnalytiqueDokument3 SeitenTD N°10 1CPI Statique Analytiqueayoubizwika.75Noch keine Bewertungen
- MDF Manip 4Dokument11 SeitenMDF Manip 4Mayssem SouidNoch keine Bewertungen
- CPAV-Rep-Ex2 Emb-FreinDokument4 SeitenCPAV-Rep-Ex2 Emb-FreinOMAR ENNAJINoch keine Bewertungen
- 2616 Automatisme de Porte de Garage MecaniqueDokument16 Seiten2616 Automatisme de Porte de Garage MecaniqueJawher SalemNoch keine Bewertungen
- Activités Élèves CorrigéDokument16 SeitenActivités Élèves CorrigéAeroEagle100% (1)
- CNC Si Tsi GM 2016Dokument22 SeitenCNC Si Tsi GM 2016Chaoub ZainabNoch keine Bewertungen
- EsvvndszzzffwswDokument39 SeitenEsvvndszzzffwswYassine Ouardini100% (1)
- Exercice Dispositif de Levage Et Basculement ElvesDokument6 SeitenExercice Dispositif de Levage Et Basculement ElvesPFANoch keine Bewertungen
- Chapitre 1: Présentation Du Système: Projet de Fin D'études Enset MohammediaDokument20 SeitenChapitre 1: Présentation Du Système: Projet de Fin D'études Enset MohammediathekrumpNoch keine Bewertungen
- Meca Flu Exam 98 99Dokument3 SeitenMeca Flu Exam 98 99BA HINoch keine Bewertungen
- Sap 2019 SujetDokument16 SeitenSap 2019 SujetPse UdoNoch keine Bewertungen
- Soutenance Du PFE de FIRAS Et EmineDokument25 SeitenSoutenance Du PFE de FIRAS Et Emineachrefnasri456Noch keine Bewertungen
- PSI TPSI 2015 11 RessourceDokument17 SeitenPSI TPSI 2015 11 Ressourceselma tiguiniNoch keine Bewertungen
- Etau LimeurDokument2 SeitenEtau Limeurfarroukh med waelNoch keine Bewertungen
- Feuille n1 MecanismesDokument4 SeitenFeuille n1 MecanismesntabNoch keine Bewertungen
- 1 Cours FreinsDokument17 Seiten1 Cours FreinsMehrez ZaafouriNoch keine Bewertungen
- Chapitre 6Dokument14 SeitenChapitre 6Othman DakirNoch keine Bewertungen
- TP4 Pompes Centrifuges ..Dokument13 SeitenTP4 Pompes Centrifuges ..Mayssem SouidNoch keine Bewertungen
- 06 Trancheur MecaDokument10 Seiten06 Trancheur MecaYahya AIDARANoch keine Bewertungen
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFDokument2 SeitenCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891 PDFOtman OtoNoch keine Bewertungen
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Dokument2 SeitenCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Otman OtoNoch keine Bewertungen
- Correctiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Dokument2 SeitenCorrectiondevoirdecontrolen3transmissiondemouvement2at2012 150523230912 Lva1 App6891Bouraoui Ben AyedNoch keine Bewertungen
- TD 25 - PFS Résolution Analytique + AM Dans Les Liaisons ParfaitesDokument6 SeitenTD 25 - PFS Résolution Analytique + AM Dans Les Liaisons Parfaitesbhs channel100% (1)
- RobotDokument6 SeitenRobotWalid KchaouNoch keine Bewertungen
- Corriges ENGA2017Dokument21 SeitenCorriges ENGA2017Kahina Dahmani100% (1)
- 1-Principe, Structure, ConstructionDokument29 Seiten1-Principe, Structure, ConstructionghandijihanNoch keine Bewertungen
- 1 - TD Af1Dokument2 Seiten1 - TD Af1Rachel YakanaNoch keine Bewertungen
- Cinematica Grafica 2 EjercicioDokument7 SeitenCinematica Grafica 2 EjercicioTaty ProañoNoch keine Bewertungen
- TP4 Pompes Centrifuges SIRINEDokument10 SeitenTP4 Pompes Centrifuges SIRINEMayssem SouidNoch keine Bewertungen
- Meca24 - CopieDokument7 SeitenMeca24 - CopiemezziNoch keine Bewertungen
- 4 - 4 WinchDokument2 Seiten4 - 4 WinchseddikmorabetNoch keine Bewertungen
- 2007 Si Tsi GM PDFDokument15 Seiten2007 Si Tsi GM PDFma tlawa7ch el zeblaNoch keine Bewertungen
- CNC 2010 - SI - TSI GM Corrige PDFDokument5 SeitenCNC 2010 - SI - TSI GM Corrige PDFma tlawa7ch el zeblaNoch keine Bewertungen
- CNC 2010 - SI - TSI GM Corrige PDFDokument5 SeitenCNC 2010 - SI - TSI GM Corrige PDFma tlawa7ch el zeblaNoch keine Bewertungen
- CNC 2015 CG Tsi GM PDFDokument10 SeitenCNC 2015 CG Tsi GM PDFma tlawa7ch el zeblaNoch keine Bewertungen
- 2007 Si Tsi GM PDFDokument15 Seiten2007 Si Tsi GM PDFma tlawa7ch el zeblaNoch keine Bewertungen
- 2009 Si Tsi GM PDFDokument6 Seiten2009 Si Tsi GM PDFma tlawa7ch el zeblaNoch keine Bewertungen
- Automatic Identification SystemDokument42 SeitenAutomatic Identification SystemIdriss KnadelNoch keine Bewertungen
- Plan Du Cours - Géologie GénéraleDokument3 SeitenPlan Du Cours - Géologie GénéraleYasser GéologueNoch keine Bewertungen
- Four Mixte Électrique Et Au Gaz: Combi TOUCHDokument82 SeitenFour Mixte Électrique Et Au Gaz: Combi TOUCHalbertlamottehorecafNoch keine Bewertungen
- Béton Précontraint - Techniques de Mise en Oeuvre PDFDokument34 SeitenBéton Précontraint - Techniques de Mise en Oeuvre PDFNacer Assam75% (4)
- CfguklllllnbbnDokument24 SeitenCfguklllllnbbnXaymae75% (4)
- IntroductionDokument2 SeitenIntroductionFifi JojoNoch keine Bewertungen
- Wa0006.Dokument1 SeiteWa0006.Nabil NabilNoch keine Bewertungen
- Parametrage IncendieDokument26 SeitenParametrage IncendieAmmar BoufaressNoch keine Bewertungen
- Le Diagnostic Et Sa Démarche 1 - Généralités:: Stratégies de MaintenanceDokument21 SeitenLe Diagnostic Et Sa Démarche 1 - Généralités:: Stratégies de Maintenancerabbaj100% (1)
- TP VoIPDokument14 SeitenTP VoIPIsmailovic ChernicovNoch keine Bewertungen
- Iso 23277 2015Dokument9 SeitenIso 23277 2015Thomas Kirov AlbertNoch keine Bewertungen
- Filets Et ChaineDokument22 SeitenFilets Et ChaineMohamed RaouyNoch keine Bewertungen
- Aspersor Maxi-Paw Rain Bird Instrucciones.Dokument1 SeiteAspersor Maxi-Paw Rain Bird Instrucciones.A M P RoaNoch keine Bewertungen
- Chapitre 3 Les Dimensions Temporelle Et Budgétaire de La Gestion de ProjetDokument38 SeitenChapitre 3 Les Dimensions Temporelle Et Budgétaire de La Gestion de Projetzabala kamalaNoch keine Bewertungen
- Assainissement02 130606125811 Phpapp01Dokument75 SeitenAssainissement02 130606125811 Phpapp01Benhmaida HananNoch keine Bewertungen
- Rapport-Climat YassineDokument12 SeitenRapport-Climat YassineMuhcineNoch keine Bewertungen
- Linux & GreenBow IPsec VPN Configuration (FR)Dokument15 SeitenLinux & GreenBow IPsec VPN Configuration (FR)greenbow100% (1)
- TD AopDokument5 SeitenTD AopFritz NGUEMO100% (1)
- Technique GSMDokument13 SeitenTechnique GSMSiddo NajimNoch keine Bewertungen
- Rappels GrafcetDokument44 SeitenRappels GrafcetAbdallah BelabbesNoch keine Bewertungen
- TD Chap2 ElectroniqueDokument5 SeitenTD Chap2 ElectroniqueWael MaatougNoch keine Bewertungen
- 88-4 Modelisation de L'interactionDokument9 Seiten88-4 Modelisation de L'interactionFikar KassimNoch keine Bewertungen
- Chapitre 6 - Liants Hydrauliques - Partie 1Dokument49 SeitenChapitre 6 - Liants Hydrauliques - Partie 1Abderrahman ZAMOUCHINoch keine Bewertungen
- Résolution Examen 2016 PDFDokument11 SeitenRésolution Examen 2016 PDFDominoHevyNoch keine Bewertungen
- Foxit PhantomPDF - Quick Guide PDFDokument34 SeitenFoxit PhantomPDF - Quick Guide PDFraex_innoNoch keine Bewertungen
- Rapport de Stage Olivier BATTINI Final PDFDokument66 SeitenRapport de Stage Olivier BATTINI Final PDFEl Abess FekirNoch keine Bewertungen
- Presentation Badihou VF 1Dokument15 SeitenPresentation Badihou VF 1Mamadou ThilloNoch keine Bewertungen
- Tutor I El Google DriveDokument21 SeitenTutor I El Google DrivejropartNoch keine Bewertungen
- G3ei 2015-2016Dokument5 SeitenG3ei 2015-2016Yahya ElamraniNoch keine Bewertungen
- Module de Formation Sur - Generalites Sur Les Systèmes ElectriquesDokument21 SeitenModule de Formation Sur - Generalites Sur Les Systèmes ElectriquesFall DjibrilNoch keine Bewertungen
- Voitures de société et mobilité durable: Diagnostic et enjeuxVon EverandVoitures de société et mobilité durable: Diagnostic et enjeuxNoch keine Bewertungen
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesVon EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesNoch keine Bewertungen
- Technologie automobile: Les Grands Articles d'UniversalisVon EverandTechnologie automobile: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Avenir de l’automobile: Les Grands Articles d'UniversalisVon EverandAvenir de l’automobile: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Conception automobile: Les Grands Articles d'UniversalisVon EverandConception automobile: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Vous saurez tout sur le permis: Un livre rassurant pour les maudits du volantVon EverandVous saurez tout sur le permis: Un livre rassurant pour les maudits du volantNoch keine Bewertungen
- Naissance de la voiture, une sacrée histoire: Ouvrage illustréVon EverandNaissance de la voiture, une sacrée histoire: Ouvrage illustréNoch keine Bewertungen
- Préparation juste à temps pour la publicité Examen du permis de conduire (CDL)Von EverandPréparation juste à temps pour la publicité Examen du permis de conduire (CDL)Noch keine Bewertungen