Das könnte Ihnen auch gefallen
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesVon EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNoch keine Bewertungen
- Analog Electronic Circuits (ELE-209) RCS (Makeup) PDFDokument2 SeitenAnalog Electronic Circuits (ELE-209) RCS (Makeup) PDFAbhijan Carter BiswasNoch keine Bewertungen
- 2nd Electrical Machines 1Dokument2 Seiten2nd Electrical Machines 1KakaoxNoch keine Bewertungen
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsVon EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNoch keine Bewertungen
- B.Sc. Engineering (Hons) Degree: Sri Lanka Institute of Information TechnologyDokument5 SeitenB.Sc. Engineering (Hons) Degree: Sri Lanka Institute of Information TechnologyThilina PereraNoch keine Bewertungen
- MCQ Gate by RK KanodiaecDokument440 SeitenMCQ Gate by RK KanodiaecViswakarma ChakravarthyNoch keine Bewertungen
- Ejercicios Del Capitulo Reaimentacion de Analysis and Design of Analog Integrated Circuits, Gray-Meyer, 5th EditionDokument3 SeitenEjercicios Del Capitulo Reaimentacion de Analysis and Design of Analog Integrated Circuits, Gray-Meyer, 5th Editionkerusacba_2011Noch keine Bewertungen
- Tutorial Sheet-4, ES 103Dokument2 SeitenTutorial Sheet-4, ES 103Krishan PrajapatiNoch keine Bewertungen
- Ideal AutotransformerDokument10 SeitenIdeal AutotransformerBT21EE017 Gulshan RajNoch keine Bewertungen
- EM2 - Lab - 1 Part 2Dokument4 SeitenEM2 - Lab - 1 Part 2S M Nahidul IslamNoch keine Bewertungen
- !7374656d5f26736f6c7574696f6e73 PDFDokument12 Seiten!7374656d5f26736f6c7574696f6e73 PDFluckyNoch keine Bewertungen
- Mccbs For Power Distribution Up To 1600A: Electrical CharacteristicsDokument1 SeiteMccbs For Power Distribution Up To 1600A: Electrical CharacteristicsSergio FelipeNoch keine Bewertungen
- PBL1Dokument6 SeitenPBL1Muhammad Shafiq Bin Abdul KarimNoch keine Bewertungen
- Fusegear Switch Fuses OS Series: OS 200 To 1250A, 690V, Designed For Safety OESA 32 To 160Dokument16 SeitenFusegear Switch Fuses OS Series: OS 200 To 1250A, 690V, Designed For Safety OESA 32 To 160SEO BDMNoch keine Bewertungen
- ELE 1003 Elect Workshop Tutorial 01 Solutions Feb 2006Dokument14 SeitenELE 1003 Elect Workshop Tutorial 01 Solutions Feb 2006Courtney 'Jackworld' JackNoch keine Bewertungen
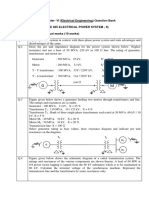
- BE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Dokument5 SeitenBE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Adesh Bhortakke100% (1)
- University of Engineering and Technology, Lahore Department of Electrical EngineeringDokument6 SeitenUniversity of Engineering and Technology, Lahore Department of Electrical EngineeringZbNoch keine Bewertungen
- DR-130 Service ManualDokument6 SeitenDR-130 Service ManualZarko MatusicNoch keine Bewertungen
- Basic Elctrical Technology (ELE 101) PDFDokument2 SeitenBasic Elctrical Technology (ELE 101) PDFRahul PinnamaneniNoch keine Bewertungen
- Manipal Institute of Technology, ManipalDokument4 SeitenManipal Institute of Technology, Manipaldon karthikeyaNoch keine Bewertungen
- Assignment 1Dokument3 SeitenAssignment 1Dr. Balraj SinghNoch keine Bewertungen
- Taller2 FullDokument5 SeitenTaller2 FullAlexander DitestaNoch keine Bewertungen
- Aula10 Chave - Seccionadora - SchneiderDokument5 SeitenAula10 Chave - Seccionadora - SchneiderDidier ColinNoch keine Bewertungen
- Electronic Devices 9th Edition - CHP 5 Basic ProblemsDokument5 SeitenElectronic Devices 9th Edition - CHP 5 Basic ProblemsThivhulawi MukondeleliNoch keine Bewertungen
- Week 1 Assignment 1 So LNDokument5 SeitenWeek 1 Assignment 1 So LNLloyd Dackz ArenasNoch keine Bewertungen
- Bifpcl 19Dokument3 SeitenBifpcl 19A One ShoppersNoch keine Bewertungen
- Tutorial 6: 1 2 C CE BEDokument4 SeitenTutorial 6: 1 2 C CE BEAadarshPotluruNoch keine Bewertungen
- 4d8f8analog 1, Tut SheetDokument19 Seiten4d8f8analog 1, Tut SheetmntykrNoch keine Bewertungen
- EE1100 Assignment 1 - PDFDokument3 SeitenEE1100 Assignment 1 - PDFShivani ChauhanNoch keine Bewertungen
- Unisonic Technologies Co., LTD: NPN Epitaxial Planar TransistorDokument4 SeitenUnisonic Technologies Co., LTD: NPN Epitaxial Planar TransistorargodumilahNoch keine Bewertungen
- MCCB1Dokument1 SeiteMCCB1nithinmundackal3623Noch keine Bewertungen
- Mechatronics 2000 PaperDokument14 SeitenMechatronics 2000 Paperaaroncete14Noch keine Bewertungen
- Ejercicios de MOSFETDokument5 SeitenEjercicios de MOSFETLuis Enrique GarcíaNoch keine Bewertungen
- Ee 8501 - Power System Analysis Unit-1 Introduction Part ADokument5 SeitenEe 8501 - Power System Analysis Unit-1 Introduction Part AVbalaji VaithiyanathanNoch keine Bewertungen
- Basic Elctrical Technology (ELE 101) (Makeup) PDFDokument2 SeitenBasic Elctrical Technology (ELE 101) (Makeup) PDFRahul PinnamaneniNoch keine Bewertungen
- Em 14Dokument2 SeitenEm 14HariNoch keine Bewertungen
- Ohm'S Law, Energy, and PowerDokument10 SeitenOhm'S Law, Energy, and PowerPatibandla SrinivasNoch keine Bewertungen
- 9A02401 Principles of Electrical EngineeringDokument4 Seiten9A02401 Principles of Electrical EngineeringsivabharathamurthyNoch keine Bewertungen
- Elec-275 Final Examination Winter 2013Dokument6 SeitenElec-275 Final Examination Winter 2013Kowe100% (1)
- Assignment 5 f2016Dokument6 SeitenAssignment 5 f2016phoebezzNoch keine Bewertungen
- Jntuh Previous Year PaperDokument2 SeitenJntuh Previous Year Paper20BA693 KmitNoch keine Bewertungen
- Funcionamiento Simplificado V90Dokument2 SeitenFuncionamiento Simplificado V90Antonio ValdebenitoNoch keine Bewertungen
- 1a.regulation of Alternator by Emf Method PDFDokument7 Seiten1a.regulation of Alternator by Emf Method PDFsakthipriyaNoch keine Bewertungen
- Synchronous Solution) ) ) ) )Dokument25 SeitenSynchronous Solution) ) ) ) )AhmedNoch keine Bewertungen
- CH 28Dokument28 SeitenCH 28okaysurepass100% (2)
- Submit Your Tma To The Drop Box in Learnousl Under The Course Eex4448Dokument2 SeitenSubmit Your Tma To The Drop Box in Learnousl Under The Course Eex4448sampath bandaraNoch keine Bewertungen
- NH40 Chint Reversora ManualDokument3 SeitenNH40 Chint Reversora ManualRicardo Nunes Pereira JuniorNoch keine Bewertungen
- ET Tutorial5 Spring 22-23Dokument3 SeitenET Tutorial5 Spring 22-23archanadey713206Noch keine Bewertungen
- ET1006 - 1213S2Exam - With Answers For RevisionDokument15 SeitenET1006 - 1213S2Exam - With Answers For RevisionfastNoch keine Bewertungen
- Anna University Examination Questions: EE6201-Circuit Theory NOV - 2014Dokument8 SeitenAnna University Examination Questions: EE6201-Circuit Theory NOV - 2014Anonymous yO7rcec6vuNoch keine Bewertungen
- AC Practice ExerciseDokument3 SeitenAC Practice ExercisesumitNoch keine Bewertungen
- Electrical 02Dokument10 SeitenElectrical 02Hary Kriz33% (3)
- Methodology For Controlling Multi-Level Converter Topologies With SCALE™-2 IGBT DriversDokument4 SeitenMethodology For Controlling Multi-Level Converter Topologies With SCALE™-2 IGBT DriversfgokcegozNoch keine Bewertungen
- Record Plus: EN 60947-2 StandardDokument20 SeitenRecord Plus: EN 60947-2 StandardHieu Nguyen ThaiNoch keine Bewertungen
- Power Eectronics Lab Manual#09Dokument6 SeitenPower Eectronics Lab Manual#09Muhammad Salman ShahidNoch keine Bewertungen
- Interupteur Sectionneur BenidictDokument1 SeiteInterupteur Sectionneur Benidictanes1skiiilNoch keine Bewertungen
- Dwnload Full Electronics Fundamentals A Systems Approach 1st Edition Floyd Solutions Manual PDFDokument36 SeitenDwnload Full Electronics Fundamentals A Systems Approach 1st Edition Floyd Solutions Manual PDFowenpatelyt39100% (10)
- EECE370 Q2 F11 Key PostDokument7 SeitenEECE370 Q2 F11 Key PosttelNoch keine Bewertungen
- Assignment 03Dokument5 SeitenAssignment 03Akshay KumarNoch keine Bewertungen
- Integrating Wind: 9 AC Networks I: Phasors and ImpedanceDokument36 SeitenIntegrating Wind: 9 AC Networks I: Phasors and Impedanceaaroncete14Noch keine Bewertungen
- Compound TensesDokument1 SeiteCompound Tensesaaroncete14Noch keine Bewertungen
- Slides R2Dokument5 SeitenSlides R2aaroncete14Noch keine Bewertungen
- Slides R3Dokument3 SeitenSlides R3aaroncete14Noch keine Bewertungen
- Slides 10Dokument33 SeitenSlides 10aaroncete14Noch keine Bewertungen
- 8 Diodes and RectifiersDokument23 Seiten8 Diodes and Rectifiersaaroncete14Noch keine Bewertungen
- TBM L8Dokument39 SeitenTBM L8aaroncete14Noch keine Bewertungen
- Mechatronics 1999 PaperDokument16 SeitenMechatronics 1999 Paperaaroncete14Noch keine Bewertungen
- TBM L4 Design and StylingDokument28 SeitenTBM L4 Design and Stylingaaroncete14Noch keine Bewertungen
- TBM L4Dokument8 SeitenTBM L4aaroncete14Noch keine Bewertungen
- TBM L2 PDFDokument8 SeitenTBM L2 PDFaaroncete14Noch keine Bewertungen
- Transducer Transduction Principle Applications Advantages DisadvantagesDokument3 SeitenTransducer Transduction Principle Applications Advantages Disadvantagesaaroncete14Noch keine Bewertungen
- TBM L3Dokument8 SeitenTBM L3aaroncete14Noch keine Bewertungen
- Answers and Hints: Thermodynamics and Energy 2012Dokument1 SeiteAnswers and Hints: Thermodynamics and Energy 2012aaroncete14Noch keine Bewertungen
- A2 2012 PDFDokument1 SeiteA2 2012 PDFaaroncete14Noch keine Bewertungen
- TBM L3Dokument21 SeitenTBM L3aaroncete14Noch keine Bewertungen
- B N R B R D: A) The Boundary ConditionDokument1 SeiteB N R B R D: A) The Boundary Conditionaaroncete14Noch keine Bewertungen
- Control Tutorial Answers 1Dokument5 SeitenControl Tutorial Answers 1aaroncete14Noch keine Bewertungen
- 2012solutionsa2a5a910b3 PDFDokument5 Seiten2012solutionsa2a5a910b3 PDFaaroncete14Noch keine Bewertungen
- MSD Part 2 Vibrations 2012Dokument67 SeitenMSD Part 2 Vibrations 2012aaroncete14Noch keine Bewertungen
- University of London Meng Examinations 2006 Part III, Mechanical EngineeringDokument7 SeitenUniversity of London Meng Examinations 2006 Part III, Mechanical Engineeringaaroncete14Noch keine Bewertungen
- Imperial College London Meng Examinations 2010Dokument7 SeitenImperial College London Meng Examinations 2010aaroncete14Noch keine Bewertungen
- MSD Tutorial 2 ArialDokument2 SeitenMSD Tutorial 2 Arialaaroncete14Noch keine Bewertungen
- MSD Tutorial 1 ArialDokument3 SeitenMSD Tutorial 1 Arialaaroncete14Noch keine Bewertungen
- MSD Tutoral 3Dokument1 SeiteMSD Tutoral 3aaroncete14Noch keine Bewertungen
- Electrical Drawings: Schemi ElettriciDokument32 SeitenElectrical Drawings: Schemi ElettricicomphomeNoch keine Bewertungen
- DC - DC Converter: FeaturesDokument4 SeitenDC - DC Converter: FeaturesLương SángNoch keine Bewertungen
- Energy and Interruption Data - 20180928 - V1Dokument18 SeitenEnergy and Interruption Data - 20180928 - V1Edward NewgateNoch keine Bewertungen
- VerilogDokument6 SeitenVerilogShaik IliyasNoch keine Bewertungen
- 03-Blasting Operation ProcessDokument27 Seiten03-Blasting Operation Processabd ullahNoch keine Bewertungen
- 20W Bridge Amplifier For Car Radio: O L O LDokument21 Seiten20W Bridge Amplifier For Car Radio: O L O LMark FisherNoch keine Bewertungen
- Heidolph EKT 3001 - EKT 3001 G - John Morris ScientificDokument16 SeitenHeidolph EKT 3001 - EKT 3001 G - John Morris ScientificBenkő ZsoltNoch keine Bewertungen
- EN ACS880-37 45 To 400 KW HW E A4 PDFDokument292 SeitenEN ACS880-37 45 To 400 KW HW E A4 PDFПламен Бонин100% (1)
- Photovoltaic PV1-F DC Solar Cable: ApplicationDokument17 SeitenPhotovoltaic PV1-F DC Solar Cable: Applicationkser82Noch keine Bewertungen
- MMBT4401 889780 PDFDokument12 SeitenMMBT4401 889780 PDFPitarsaNoch keine Bewertungen
- Interview Questions MS WordDokument20 SeitenInterview Questions MS Wordhassan iftikhar100% (1)
- Generator Principles Generator Construction Excitation System Operational Aspects Generator ProtectionsDokument50 SeitenGenerator Principles Generator Construction Excitation System Operational Aspects Generator Protectionsvasanth11kv100% (1)
- 12V DC Regulated Power Supply CircuitDokument4 Seiten12V DC Regulated Power Supply CircuitHeknath100% (1)
- Slup 392Dokument29 SeitenSlup 392Juan CecconiNoch keine Bewertungen
- Magnetic Field Sensor MB60-12GM50-E2: DimensionsDokument4 SeitenMagnetic Field Sensor MB60-12GM50-E2: DimensionsHemant RasamNoch keine Bewertungen
- Hamilton PSR ManualDokument8 SeitenHamilton PSR Manualmeor3705Noch keine Bewertungen
- Ficha Técnica Electroválvula JJ08Dokument1 SeiteFicha Técnica Electroválvula JJ08Jorge JuanNoch keine Bewertungen
- Mitsubishi Manuals TRA8AL PDFDokument31 SeitenMitsubishi Manuals TRA8AL PDFFernando SabogalNoch keine Bewertungen
- Very High Input Impedance Excellent Trouble Shooting Tool 5 Functions, 43 RangesDokument1 SeiteVery High Input Impedance Excellent Trouble Shooting Tool 5 Functions, 43 RangesLuis SilvaNoch keine Bewertungen
- Eraser Model MNCDokument8 SeitenEraser Model MNCKowshickNoch keine Bewertungen
- DIGITAL MULTI-METER - The Definitive Guide On To Effectively Use Your Digital Multi-Meter PDFDokument50 SeitenDIGITAL MULTI-METER - The Definitive Guide On To Effectively Use Your Digital Multi-Meter PDFHerman HeseNoch keine Bewertungen
- Microprocessor Based Alternator SynchronizerDokument17 SeitenMicroprocessor Based Alternator SynchronizerPenguinNoch keine Bewertungen
- RPL201H Traction Controller Error Code ListDokument19 SeitenRPL201H Traction Controller Error Code Listvictor laraNoch keine Bewertungen
- M-9531-9818-01-C Installation Guide RGH22 RGS20 enDokument15 SeitenM-9531-9818-01-C Installation Guide RGH22 RGS20 enNicolae JulaNoch keine Bewertungen
- 2.catalogue - HEA Igniter System BCPLDokument6 Seiten2.catalogue - HEA Igniter System BCPLVishesh BankarNoch keine Bewertungen
- Beautiful Plane Pictures - Google SearchDokument1 SeiteBeautiful Plane Pictures - Google SearchMuhammad IslamNoch keine Bewertungen
- Troubleshooting: Indications of Encoder Circuit ProblemsDokument6 SeitenTroubleshooting: Indications of Encoder Circuit ProblemsnobodymagdesignNoch keine Bewertungen
- LV CF2N - LV CF2N - 3 - G000099976Dokument2 SeitenLV CF2N - LV CF2N - 3 - G000099976Jaime MartinNoch keine Bewertungen
- 15ee46 Op-Amps and LicDokument25 Seiten15ee46 Op-Amps and Licchaitanya100% (1)
- Experiment No. 05: RC Coupled Multistage CE-CC Cascade AmplifierDokument5 SeitenExperiment No. 05: RC Coupled Multistage CE-CC Cascade AmplifierM. Ahmad RazaNoch keine Bewertungen
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Von EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Noch keine Bewertungen
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsVon EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNoch keine Bewertungen
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- Wearable Sensors: Fundamentals, Implementation and ApplicationsVon EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNoch keine Bewertungen
- A Mind at Play: How Claude Shannon Invented the Information AgeVon EverandA Mind at Play: How Claude Shannon Invented the Information AgeBewertung: 4 von 5 Sternen4/5 (53)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldVon EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldBewertung: 4 von 5 Sternen4/5 (87)