Das könnte Ihnen auch gefallen
- Civil Engineering November 2020 Plane & Solid Geometry 1: Review InnovationsDokument2 SeitenCivil Engineering November 2020 Plane & Solid Geometry 1: Review InnovationsKayceeAlcantaraNoch keine Bewertungen
- This Study Resource WasDokument3 SeitenThis Study Resource WasKROSKIDOCNoch keine Bewertungen
- Chapter 1: Vectors and The Geometry of SpaceDokument38 SeitenChapter 1: Vectors and The Geometry of SpaceZazliana IzattiNoch keine Bewertungen
- Finite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The NetherlandsDokument8 SeitenFinite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The Netherlandsbdalcin5512Noch keine Bewertungen
- As MathematicsDokument17 SeitenAs Mathematicsjupe01Noch keine Bewertungen
- 11MMCAS 2021 NotesDokument189 Seiten11MMCAS 2021 NotesJinang ShahNoch keine Bewertungen
- 3D-PPt MODULE 1Dokument12 Seiten3D-PPt MODULE 1AYASHA DASNoch keine Bewertungen
- Planes and Lines in 3D SpaceDokument38 SeitenPlanes and Lines in 3D SpaceFlorin AgaiNoch keine Bewertungen
- Choosing Numbers For The Properties of Their SquaresDokument11 SeitenChoosing Numbers For The Properties of Their SquaresHarshita ChaturvediNoch keine Bewertungen
- Linear ProgrammingDokument28 SeitenLinear ProgrammingRaka SubiNoch keine Bewertungen
- Constructibility of Regular PolygonsDokument26 SeitenConstructibility of Regular PolygonsSamuel SilvaNoch keine Bewertungen
- h03 Essential MathDokument13 Seitenh03 Essential Mathakyadav123Noch keine Bewertungen
- A Brief Survey of Differential Geometry: Adrian Down August 29, 2006Dokument5 SeitenA Brief Survey of Differential Geometry: Adrian Down August 29, 2006NeenaKhanNoch keine Bewertungen
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Dokument12 SeitenLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDNoch keine Bewertungen
- 1101.5987v1 Saemann 2Dokument18 Seiten1101.5987v1 Saemann 2tallalethNoch keine Bewertungen
- Maths GCSE Revision 9 - 1 2022Dokument5 SeitenMaths GCSE Revision 9 - 1 2022jsa4ye99teNoch keine Bewertungen
- Module 6 Polynomial CurvesDokument24 SeitenModule 6 Polynomial CurvesRufo FelixNoch keine Bewertungen
- Intersection Theory - Valentina KiritchenkoDokument18 SeitenIntersection Theory - Valentina KiritchenkoHoracio CastellanosNoch keine Bewertungen
- Integral Theorems: 9.1 The Divergence Theorem of GaussDokument26 SeitenIntegral Theorems: 9.1 The Divergence Theorem of Gausssamwel kiwaleNoch keine Bewertungen
- Math 162A - Notes: Introduction and NotationDokument38 SeitenMath 162A - Notes: Introduction and NotationNickNoch keine Bewertungen
- Random MatricesDokument27 SeitenRandom MatricesolenobleNoch keine Bewertungen
- Numerical Integration For MultivariableDokument24 SeitenNumerical Integration For MultivariableCupa no DensetsuNoch keine Bewertungen
- Eigenvalues, Eigenvectors, Diagonalisation: City of London Academy SouthwarkDokument3 SeitenEigenvalues, Eigenvectors, Diagonalisation: City of London Academy SouthwarkmailbabuNoch keine Bewertungen
- P409M Miller 2008 All PDFDokument112 SeitenP409M Miller 2008 All PDFSukishi AdachiNoch keine Bewertungen
- Example of Hessenberg ReductionDokument21 SeitenExample of Hessenberg ReductionMohammad Umar RehmanNoch keine Bewertungen
- Derivative of Trigonometric Functions CG50Dokument11 SeitenDerivative of Trigonometric Functions CG50Abed ItaniNoch keine Bewertungen
- Chapter 21Dokument6 SeitenChapter 21manikannanp_ponNoch keine Bewertungen
- Least Squares EllipsoidDokument17 SeitenLeast Squares EllipsoidJoco Franz AmanoNoch keine Bewertungen
- PermutationsDokument3 SeitenPermutationsIvana GrgićNoch keine Bewertungen
- Diffrential FormDokument13 SeitenDiffrential FormmukulNoch keine Bewertungen
- Image Compression With Multiresolution Singular Value Decomposition and Other MethodsDokument22 SeitenImage Compression With Multiresolution Singular Value Decomposition and Other MethodsFeriel OTNoch keine Bewertungen
- Lemh 205Dokument41 SeitenLemh 205kishanvsalian88Noch keine Bewertungen
- Matrix Decomposition Chap1Dokument9 SeitenMatrix Decomposition Chap1Jordan JooNoch keine Bewertungen
- ED536913Dokument16 SeitenED536913shirleyyy.idoloNoch keine Bewertungen
- RQM PDF 15296Dokument40 SeitenRQM PDF 15296jaburicoNoch keine Bewertungen
- Chapter Five GraphicsDokument37 SeitenChapter Five GraphicswalelegneNoch keine Bewertungen
- System of Linear Equation and ApplicationDokument32 SeitenSystem of Linear Equation and Applicationihsaanbava0% (1)
- Monte Carlo Simulation Methods Lecture NotesDokument10 SeitenMonte Carlo Simulation Methods Lecture Notesapi-3724597Noch keine Bewertungen
- 8 Rank of A Matrix: K J N KDokument4 Seiten8 Rank of A Matrix: K J N KPanji PradiptaNoch keine Bewertungen
- Operation ResearchDokument10 SeitenOperation Researchkawaljeet_singhNoch keine Bewertungen
- Extending An Orthonormal Rational Set of Vectors Into An Orthonormal Rational BasisDokument4 SeitenExtending An Orthonormal Rational Set of Vectors Into An Orthonormal Rational BasisEpic WinNoch keine Bewertungen
- Matrix decomposition methods for solving linear systemsDokument10 SeitenMatrix decomposition methods for solving linear systemsDebashish RoulNoch keine Bewertungen
- Invariant Points & Lines in TransformationsDokument4 SeitenInvariant Points & Lines in TransformationsEmmaculate OngumNoch keine Bewertungen
- Invertible MatrixDokument7 SeitenInvertible MatrixTaylorNoch keine Bewertungen
- Relativity EssayDokument15 SeitenRelativity EssayQuinto BeatleNoch keine Bewertungen
- Dimensionality Reduction by Pca: Non - FeasibleDokument26 SeitenDimensionality Reduction by Pca: Non - FeasiblehamzaNoch keine Bewertungen
- Deep LearningDokument28 SeitenDeep Learning20010700Noch keine Bewertungen
- Topic5 Linear TransformationsDokument25 SeitenTopic5 Linear TransformationsFilipus Boby Setiawan BudimanNoch keine Bewertungen
- Lecture 4Dokument11 SeitenLecture 4Haider AliNoch keine Bewertungen
- Advanced Problem Solving Lecture Notes and Problem Sets: Peter Hästö Torbjörn Helvik Eugenia MalinnikovaDokument35 SeitenAdvanced Problem Solving Lecture Notes and Problem Sets: Peter Hästö Torbjörn Helvik Eugenia Malinnikovaksva2326Noch keine Bewertungen
- Lec 6Dokument5 SeitenLec 6stathiss11Noch keine Bewertungen
- Unique RREF and Cramer's Rule ProofDokument8 SeitenUnique RREF and Cramer's Rule Proofshivam shuklaNoch keine Bewertungen
- Algebra Chapter 3 Group 3 Compiled CompressedDokument68 SeitenAlgebra Chapter 3 Group 3 Compiled CompressedRey Roluna100% (1)
- Karen Pao, Frederick Soon - Vector Calculus Study Guide & Solutions Manual - W. H. Freeman (2003)Dokument171 SeitenKaren Pao, Frederick Soon - Vector Calculus Study Guide & Solutions Manual - W. H. Freeman (2003)Adriano VerdérioNoch keine Bewertungen
- Survey FormulaDokument12 SeitenSurvey FormulaArsalan PervezNoch keine Bewertungen
- DIHEDRAL GROUPS: ROTATIONS AND REFLECTIONS OF REGULAR POLYGONSDokument8 SeitenDIHEDRAL GROUPS: ROTATIONS AND REFLECTIONS OF REGULAR POLYGONSRubens Vilhena FonsecaNoch keine Bewertungen
- Elliptic CurveDokument12 SeitenElliptic CurveHolman Alejandro Pérez AyalaNoch keine Bewertungen
- Theorist's Toolkit Lecture 6: Eigenvalues and ExpandersDokument9 SeitenTheorist's Toolkit Lecture 6: Eigenvalues and ExpandersJeremyKunNoch keine Bewertungen
- Sp'21 Maths III-Lect 3 - Analytical Geometry in 3D-SpaceDokument76 SeitenSp'21 Maths III-Lect 3 - Analytical Geometry in 3D-SpaceMuhammad FurqanNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Cohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31Von EverandCohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31Noch keine Bewertungen
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121Von EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121Noch keine Bewertungen
- ENAC Booklet 2020 OptimalControlDokument135 SeitenENAC Booklet 2020 OptimalControlLucas KevinNoch keine Bewertungen
- JazarDokument60 SeitenJazarLucas KevinNoch keine Bewertungen
- Representation Theory of Finite Groups - Rodriguez-Villegas, FernandoDokument99 SeitenRepresentation Theory of Finite Groups - Rodriguez-Villegas, FernandoLucas KevinNoch keine Bewertungen
- Introduction To Algebraic Topology - Gottsche, LotharDokument52 SeitenIntroduction To Algebraic Topology - Gottsche, LotharLucas KevinNoch keine Bewertungen
- Course Syllabus For Math 231br Advanced Al - Quick, GereonDokument167 SeitenCourse Syllabus For Math 231br Advanced Al - Quick, GereonLucas KevinNoch keine Bewertungen
- Glossary: Geometric Mean, With Equality If and Only If All Variables Are Equal. B C ADokument4 SeitenGlossary: Geometric Mean, With Equality If and Only If All Variables Are Equal. B C AAlexandra ȘtefanNoch keine Bewertungen
- Mixed Hodge Polynomials of Character Varie - Hausel, TamasDokument70 SeitenMixed Hodge Polynomials of Character Varie - Hausel, TamasLucas KevinNoch keine Bewertungen
- Introduction To Algebraic Geometry - Gottsche, LotharDokument144 SeitenIntroduction To Algebraic Geometry - Gottsche, LotharLucas KevinNoch keine Bewertungen
- Solving The Quintic by Iteration - Doyle, PeterDokument30 SeitenSolving The Quintic by Iteration - Doyle, PeterLucas KevinNoch keine Bewertungen
- Chp3 Combinatorics 2Dokument14 SeitenChp3 Combinatorics 2Lucas KevinNoch keine Bewertungen
- Chp1 CombinatoricsDokument19 SeitenChp1 CombinatoricsAna BercaruNoch keine Bewertungen
- Chp2 LinalgDokument8 SeitenChp2 LinalgLucas KevinNoch keine Bewertungen
- Warm-Up Problem Set: 1.1 ApplicationsDokument10 SeitenWarm-Up Problem Set: 1.1 ApplicationsnishantNoch keine Bewertungen
- SOS DumbassDokument11 SeitenSOS DumbassShamim AkhtarNoch keine Bewertungen
- Using CDN to Derive Algebraic IdentitiesDokument12 SeitenUsing CDN to Derive Algebraic IdentitiesLucas KevinNoch keine Bewertungen
- MA301 CH 2Dokument15 SeitenMA301 CH 2Arka SenguptaNoch keine Bewertungen
- Dumb As SingDokument9 SeitenDumb As SingAleksandar MilosavljevićNoch keine Bewertungen
- Chapter IIDokument160 SeitenChapter IIJay ChavezNoch keine Bewertungen
- Triangulation and Trilateration: 1.1 GeneralDokument38 SeitenTriangulation and Trilateration: 1.1 GeneralSantosh Yadav80% (5)
- Conics DemoDokument7 SeitenConics DemoNagendra VenkatNoch keine Bewertungen
- Elastic Gridshell Design and Modeling for Ephemeral Cathedral StructureDokument77 SeitenElastic Gridshell Design and Modeling for Ephemeral Cathedral StructureMedNoch keine Bewertungen
- GTM192 Elements of Functional Analysis PDFDokument412 SeitenGTM192 Elements of Functional Analysis PDFMarcus Vinicius Sousa Sousa100% (2)
- 12-3 Tangent Lines and VelocityDokument33 Seiten12-3 Tangent Lines and VelocityIqbalNoch keine Bewertungen
- 7 Hard Trig Problems: Can You Solve These Challenging Geometry PuzzlesDokument6 Seiten7 Hard Trig Problems: Can You Solve These Challenging Geometry Puzzleskaushik247Noch keine Bewertungen
- Math23x Exit Exam Review Material - Multivariable CalculusDokument4 SeitenMath23x Exit Exam Review Material - Multivariable CalculusMark Angelo PoliciosNoch keine Bewertungen
- Further Pure Mathematics: Level 2 Paper 1Dokument32 SeitenFurther Pure Mathematics: Level 2 Paper 1su100% (1)
- MECH 211 - Mechanical Engineering Drawing: François TardyDokument94 SeitenMECH 211 - Mechanical Engineering Drawing: François TardyFrancois TardyNoch keine Bewertungen
- Mathematics 2D Geometry MCQDokument20 SeitenMathematics 2D Geometry MCQSoniyaKanwalG100% (1)
- Parallelograms: MA 341 - Topics in GeometryDokument36 SeitenParallelograms: MA 341 - Topics in GeometryHazel Clemente CarreonNoch keine Bewertungen
- Problems Sheet 2Dokument2 SeitenProblems Sheet 2Haswanth VoonnaNoch keine Bewertungen
- Solid Geo Bim 3Dokument4 SeitenSolid Geo Bim 3Rosmizar AhmadNoch keine Bewertungen
- 02 Electric FieldDokument7 Seiten02 Electric FieldFirdous ANoch keine Bewertungen
- Irigaray Sexual Difference 2Dokument8 SeitenIrigaray Sexual Difference 2LCLibraryNoch keine Bewertungen
- Differentiation Concepts ExplainedDokument51 SeitenDifferentiation Concepts ExplainedAhadd ViraniNoch keine Bewertungen
- Today: Homework Due Conservation of Energy Read Chap 13, Sections 6 To 9 Homework: Chap. 13, Problems 57, 61, 67, 76Dokument12 SeitenToday: Homework Due Conservation of Energy Read Chap 13, Sections 6 To 9 Homework: Chap. 13, Problems 57, 61, 67, 76Tony LoogmanNoch keine Bewertungen
- Finite Element Formulation for Stiffened Shell StructuresDokument42 SeitenFinite Element Formulation for Stiffened Shell StructuresHaitham AyyadNoch keine Bewertungen
- Spatial Dimensions of MusicDokument33 SeitenSpatial Dimensions of MusicMA Lobato100% (1)
- Cambridge IGCSE: English As A Second Language 0510/52Dokument24 SeitenCambridge IGCSE: English As A Second Language 0510/52Mihaela Cristina LazarNoch keine Bewertungen
- Gender, Language, and The Separation of Public and Private SpaceDokument283 SeitenGender, Language, and The Separation of Public and Private SpaceGlória MorizNoch keine Bewertungen
- Projectile Motion 2Dokument15 SeitenProjectile Motion 2Ayman EidNoch keine Bewertungen
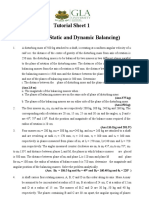
- Tutorial Sheet 1Dokument3 SeitenTutorial Sheet 1Shashank SrivastavaNoch keine Bewertungen
- Conservation of Energy and Angular MomentumDokument57 SeitenConservation of Energy and Angular MomentumKaezeth Jasmine AñanaNoch keine Bewertungen
- Sensor - TYPE GYROSCOPEDokument2 SeitenSensor - TYPE GYROSCOPEНикола НикићNoch keine Bewertungen
- PHYS 431 Problem Set 01 PDFDokument2 SeitenPHYS 431 Problem Set 01 PDFMazhar ShahzadNoch keine Bewertungen