Das könnte Ihnen auch gefallen
- Final Exam Formula SheetDokument3 SeitenFinal Exam Formula Sheetjanaka100% (1)
- Electronics Design Mosfet ExercisesDokument12 SeitenElectronics Design Mosfet ExercisesbhanuNoch keine Bewertungen
- Electronics Ch8Dokument35 SeitenElectronics Ch8Boudi ChouNoch keine Bewertungen
- Chapter 2: Diode Applications: 2.1 Half Wave RectifiersDokument27 SeitenChapter 2: Diode Applications: 2.1 Half Wave Rectifiersahmed adnanNoch keine Bewertungen
- Rectifier CircuitsDokument9 SeitenRectifier CircuitsJackson MtongaNoch keine Bewertungen
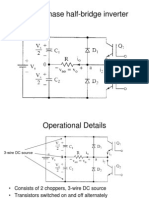
- Single-Phase Half-Bridge InverterDokument29 SeitenSingle-Phase Half-Bridge InverterSwati MishraNoch keine Bewertungen
- Single-Phase Half-Bridge InverterDokument29 SeitenSingle-Phase Half-Bridge InverterNoureddine BounaslaNoch keine Bewertungen
- Chapter Three Generation of Impulse Voltages: /T (In Sec) WhereDokument24 SeitenChapter Three Generation of Impulse Voltages: /T (In Sec) WhereKarar SNoch keine Bewertungen
- Controlled Rectifiers: DR Keshav PatidarDokument38 SeitenControlled Rectifiers: DR Keshav PatidarManav JainNoch keine Bewertungen
- Lec 8 5 8 6BJT-Differential AmplifierDokument105 SeitenLec 8 5 8 6BJT-Differential AmplifierRakhmeen gulNoch keine Bewertungen
- 18EE53 MODULE 4-Dual ConvertorDokument8 Seiten18EE53 MODULE 4-Dual ConvertorAshwiniNoch keine Bewertungen
- Đ Án Rơ Le DuyDokument44 SeitenĐ Án Rơ Le Duynam phuongNoch keine Bewertungen
- Unit 4 InvertersDokument86 SeitenUnit 4 InvertersHaritha RkNoch keine Bewertungen
- Diffamps 1Dokument60 SeitenDiffamps 1Shrinidhi MohanNoch keine Bewertungen
- Chapter 2 Part 2 EEE411 DR Yusnita PDFDokument60 SeitenChapter 2 Part 2 EEE411 DR Yusnita PDFCaha yANoch keine Bewertungen
- Chapter5 Industrial InverterDokument54 SeitenChapter5 Industrial InverterTruong NguyenNoch keine Bewertungen
- Vlsi Part-IiiDokument37 SeitenVlsi Part-Iiimishrapratik986Noch keine Bewertungen
- Unit 2 Converters (Half Controlled)Dokument52 SeitenUnit 2 Converters (Half Controlled)Tenzin JamtshoNoch keine Bewertungen
- Inverters (DC-AC Converters) : Unit VDokument29 SeitenInverters (DC-AC Converters) : Unit VseeeniNoch keine Bewertungen
- Name-Pooja Chirde Roll No.-207121005: 4. Simulation of Single-Phase and Three - Phase Ac Voltage ControllerDokument11 SeitenName-Pooja Chirde Roll No.-207121005: 4. Simulation of Single-Phase and Three - Phase Ac Voltage Controllerpooja chirdeNoch keine Bewertungen
- Quiz 07: College of Science and EngineeringDokument2 SeitenQuiz 07: College of Science and EngineeringAdam TraoreNoch keine Bewertungen
- Lec 9Dokument27 SeitenLec 9ahmed ragabNoch keine Bewertungen
- Chapter 4. Multi-Stage AmplifiersDokument62 SeitenChapter 4. Multi-Stage AmplifiersAnh Ha Duy AnhNoch keine Bewertungen
- Asset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineDokument16 SeitenAsset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineAbrar ChowdhuryNoch keine Bewertungen
- Lab 5Dokument8 SeitenLab 5Smshihab ShararNoch keine Bewertungen
- Final Power Electronics Formulas ListDokument8 SeitenFinal Power Electronics Formulas ListJuan RaoofNoch keine Bewertungen
- 1.Hvdc Basic TheoryDokument41 Seiten1.Hvdc Basic TheoryJakka VenkatNoch keine Bewertungen
- AC-AC Controllers: EE307 - Power Electronics Spring 2019Dokument22 SeitenAC-AC Controllers: EE307 - Power Electronics Spring 2019Abdullah NasirNoch keine Bewertungen
- Final Exam تخلفات - Model Answer - Part 1Dokument6 SeitenFinal Exam تخلفات - Model Answer - Part 1Maher Gomaa IsmaeelNoch keine Bewertungen
- Chapter (5) Part (2) (Long Channel MOSFET)Dokument22 SeitenChapter (5) Part (2) (Long Channel MOSFET)Ahmed SalehNoch keine Bewertungen
- Unit 3Dokument23 SeitenUnit 3Prema ElizabethNoch keine Bewertungen
- HW2 SolutionsDokument5 SeitenHW2 SolutionsJames JohnsonNoch keine Bewertungen
- Chapter 5 - Ac To Ac ConverterDokument43 SeitenChapter 5 - Ac To Ac Converterapolloroka100% (1)
- Analog Electronics Lecture-27-21032024Dokument24 SeitenAnalog Electronics Lecture-27-21032024Sayam SanchetiNoch keine Bewertungen
- AC RLC CircuitDokument16 SeitenAC RLC CircuitkhalsnNoch keine Bewertungen
- Chopper Basic PDFDokument12 SeitenChopper Basic PDFSoumya DuttaNoch keine Bewertungen
- محاضرة الاسبوع الاولDokument7 Seitenمحاضرة الاسبوع الاولMohammad alhaboob2030Noch keine Bewertungen
- Chapter 4Dokument61 SeitenChapter 4Tuấn NguyễnNoch keine Bewertungen
- Band GapDokument15 SeitenBand GapMoin PashaNoch keine Bewertungen
- Electrical EngineeringDokument58 SeitenElectrical EngineeringNor Syahirah MohamadNoch keine Bewertungen
- CHAPTER 2 - AC TO DC CONVERTER (Student Updated)Dokument60 SeitenCHAPTER 2 - AC TO DC CONVERTER (Student Updated)Ct KhatijahNoch keine Bewertungen
- Communication SystemsDokument24 SeitenCommunication Systemstalha4400573Noch keine Bewertungen
- 555 AstableDokument5 Seiten555 AstableMD MirajNoch keine Bewertungen
- EEE 1287-Fall 2019-Topic 07Dokument46 SeitenEEE 1287-Fall 2019-Topic 07Ahnaf AmerNoch keine Bewertungen
- Energy Is Static Electric Fields:: N M M MDokument4 SeitenEnergy Is Static Electric Fields:: N M M MJoel DsouzaNoch keine Bewertungen
- SVPWM PDFDokument25 SeitenSVPWM PDFLeroy Lionel SonfackNoch keine Bewertungen
- Final Exam - Paper C (November 2015) MEMO Ver 2Dokument11 SeitenFinal Exam - Paper C (November 2015) MEMO Ver 2Shongile Nwa mavoneNoch keine Bewertungen
- Lecture # 07 AC Voltage ControllerDokument29 SeitenLecture # 07 AC Voltage ControllerSohira QaziNoch keine Bewertungen
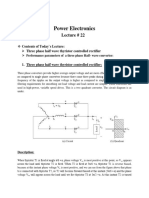
- Power Electronics: Lecture # 22Dokument3 SeitenPower Electronics: Lecture # 22adnanNoch keine Bewertungen
- Proiect AnteneDokument20 SeitenProiect AnteneAndrei DuțanNoch keine Bewertungen
- N-Line Simulation (Lossless) : (T) and Z (T) (T) and (T)Dokument3 SeitenN-Line Simulation (Lossless) : (T) and Z (T) (T) and (T)Ioan TudosaNoch keine Bewertungen
- Power Electronics Full NotebookDokument41 SeitenPower Electronics Full NotebookMohanad Al-tahrawiNoch keine Bewertungen
- Elec 2301 BJT DiffDokument14 SeitenElec 2301 BJT DiffKeith TsechowNoch keine Bewertungen
- Medium TransmissionDokument15 SeitenMedium TransmissionPerez Trisha Mae D.Noch keine Bewertungen
- Experiment No. 1: ObjectiveDokument9 SeitenExperiment No. 1: ObjectiveNitin RajputNoch keine Bewertungen
- 3 Phase Controlled Rectifiers FinalDokument57 Seiten3 Phase Controlled Rectifiers FinalRama PrasadNoch keine Bewertungen
- Ch9 AC To AC Converters: Classification AC Voltage Controllers AC Power ControllersDokument26 SeitenCh9 AC To AC Converters: Classification AC Voltage Controllers AC Power Controllersherokaboss1987Noch keine Bewertungen
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterVon EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNoch keine Bewertungen
- Electronics 3 Checkbook: The Checkbooks SeriesVon EverandElectronics 3 Checkbook: The Checkbooks SeriesBewertung: 5 von 5 Sternen5/5 (1)
- Conf App of CC in Edu IscDokument12 SeitenConf App of CC in Edu IscMuhammad Muhammad SuleimanNoch keine Bewertungen
- Automatic Stabilization of Zigbee Network: Guanghui Pan Jia HeDokument4 SeitenAutomatic Stabilization of Zigbee Network: Guanghui Pan Jia HeEdgar A.BNoch keine Bewertungen
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Dokument4 SeitenI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Basic Manipulation of Images in MATLABDokument5 SeitenBasic Manipulation of Images in MATLABsharmiNoch keine Bewertungen
- Informer-IP Series C: Setup, Program, and User ManualDokument102 SeitenInformer-IP Series C: Setup, Program, and User ManualRagdex RockNoch keine Bewertungen
- LogDokument3 SeitenLogBrian Angelo Laconsay RapadaNoch keine Bewertungen
- Microprocessors and Microcontrollers: Sunil Mathur Jeebananda PandaDokument16 SeitenMicroprocessors and Microcontrollers: Sunil Mathur Jeebananda Pandadinesh patnaikNoch keine Bewertungen
- Eecs 151/251A Asic Lab 2: Simulation: Prof. John Wawrzynek Tas: Quincy Huynh, Tan NguyenDokument12 SeitenEecs 151/251A Asic Lab 2: Simulation: Prof. John Wawrzynek Tas: Quincy Huynh, Tan NguyenNguyen Van ToanNoch keine Bewertungen
- IT314-Scenarios and Use Case ModelingDokument31 SeitenIT314-Scenarios and Use Case ModelingVandan BhuvaNoch keine Bewertungen
- R5905112 04 ReleaseNoteDokument16 SeitenR5905112 04 ReleaseNotejcll lopezNoch keine Bewertungen
- Rog Strix Scope RX TKL Wireless DeluxeDokument4 SeitenRog Strix Scope RX TKL Wireless DeluxeSchalk PienaarNoch keine Bewertungen
- Speed Negotiation Improvement For Hard Disk Drive Serial ATA PDFDokument99 SeitenSpeed Negotiation Improvement For Hard Disk Drive Serial ATA PDFNguyễn HạnhNoch keine Bewertungen
- Srs of E - Book ShoppingDokument26 SeitenSrs of E - Book Shoppingmahanmalik69% (29)
- 2022 - 11 - 01 - MongoDB Top 7 NoSQL ConsiderationsDokument20 Seiten2022 - 11 - 01 - MongoDB Top 7 NoSQL Considerationsalt.z3-cxsx5peNoch keine Bewertungen
- From DFT To Z-TransformDokument10 SeitenFrom DFT To Z-TransformVivien VilladelreyNoch keine Bewertungen
- Et200sp Ai 4xi 2 4 Wire ST Manual en-US en-USDokument30 SeitenEt200sp Ai 4xi 2 4 Wire ST Manual en-US en-USNicolas Rodríguez NietoNoch keine Bewertungen
- DR Mohamed Optics Subject AssigmentDokument3 SeitenDR Mohamed Optics Subject AssigmentEyasu Kanbato OtoroNoch keine Bewertungen
- Chapter 7Dokument55 SeitenChapter 7Abo Shaker HaboudalNoch keine Bewertungen
- Torniquete WJTS122 PDFDokument11 SeitenTorniquete WJTS122 PDFpraga29Noch keine Bewertungen
- 5620 SAM Part Number ListingDokument109 Seiten5620 SAM Part Number ListingSa VahidiNoch keine Bewertungen
- Oracle Cloud Infrastructure PDFDokument34 SeitenOracle Cloud Infrastructure PDFDinesh Yepuru100% (1)
- Oracle Cloud Functional SetupDokument74 SeitenOracle Cloud Functional Setuprajus241Noch keine Bewertungen
- SE-HD55 (sm-AD9803049C2)Dokument29 SeitenSE-HD55 (sm-AD9803049C2)Jory2005Noch keine Bewertungen
- 15 Common PC Problems and How To Troubleshoot Them - HongkiatDokument18 Seiten15 Common PC Problems and How To Troubleshoot Them - Hongkiatያሲን ሁሴንNoch keine Bewertungen
- Privilege Escalation Techniques Systems (Windows and Linux)Dokument340 SeitenPrivilege Escalation Techniques Systems (Windows and Linux)Ahmed Jemaii100% (1)
- GP-200 - Online Manual - EN - Firmware V1.2.1 - 220801Dokument56 SeitenGP-200 - Online Manual - EN - Firmware V1.2.1 - 220801Paolo ArgeriNoch keine Bewertungen
- LogDokument706 SeitenLogChú BìnhNoch keine Bewertungen
- Online Book Store SystemDokument6 SeitenOnline Book Store SystemKhizraNoch keine Bewertungen
- Raster Scan and Random Scan PDFDokument10 SeitenRaster Scan and Random Scan PDFMusic DiaryNoch keine Bewertungen
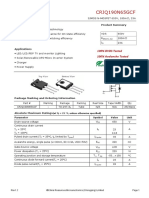
- CRJQ190N65GCFDokument9 SeitenCRJQ190N65GCFVadim PopovichNoch keine Bewertungen