Das könnte Ihnen auch gefallen
- AntenasDokument6 SeitenAntenasAguekeNoch keine Bewertungen
- Ejercicios OS y Tierra PlanaDokument11 SeitenEjercicios OS y Tierra PlanaAguekeNoch keine Bewertungen
- 176-Texto Del Artículo-1260-1-10-20190327 PDFDokument14 Seiten176-Texto Del Artículo-1260-1-10-20190327 PDFDIEGO GUALOCHICONoch keine Bewertungen
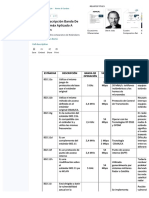
- PDF Estandar Descripcion Banda de Operacion Vmax Aplicado A Restricciones - CompressDokument3 SeitenPDF Estandar Descripcion Banda de Operacion Vmax Aplicado A Restricciones - CompressAguekeNoch keine Bewertungen
- Formato Deberes Trabajos Consultas InvestigacionDokument1 SeiteFormato Deberes Trabajos Consultas InvestigacionAguekeNoch keine Bewertungen
- R Rec SM.1541 6 201508 I!!pdf SDokument87 SeitenR Rec SM.1541 6 201508 I!!pdf SAguekeNoch keine Bewertungen
- Normas Constitucionales PDFDokument1 SeiteNormas Constitucionales PDFEnriqueEspinelNoch keine Bewertungen
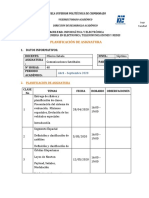
- Planificación Comunicaciones SatelitalesDokument3 SeitenPlanificación Comunicaciones SatelitalesAguekeNoch keine Bewertungen
- Lm01 R Es Protocolo 802.11Dokument40 SeitenLm01 R Es Protocolo 802.11sergioNoch keine Bewertungen
- Deber 1 PDFDokument2 SeitenDeber 1 PDFAguekeNoch keine Bewertungen
- Problemas Params PDFDokument5 SeitenProblemas Params PDFAguekeNoch keine Bewertungen
- Informe Circuito RCDokument8 SeitenInforme Circuito RCAguekeNoch keine Bewertungen
- Silabo COMUNICACIONES SATELITALESDokument11 SeitenSilabo COMUNICACIONES SATELITALESAguekeNoch keine Bewertungen
- Comparativo de Las Constituciones de Los Regímenes Presidenciales en América LatinaDokument2 SeitenComparativo de Las Constituciones de Los Regímenes Presidenciales en América LatinaAguekeNoch keine Bewertungen
- Generalidades A.F.Dokument2 SeitenGeneralidades A.F.AguekeNoch keine Bewertungen
- Generalidades A.F.Dokument2 SeitenGeneralidades A.F.AguekeNoch keine Bewertungen
- Casopractico 3&4Dokument4 SeitenCasopractico 3&4AguekeNoch keine Bewertungen
- Conceptos Básicos de Análisis Financiero PDFDokument64 SeitenConceptos Básicos de Análisis Financiero PDFAguekeNoch keine Bewertungen
- Conceptos Básicos de Análisis Financiero PDFDokument64 SeitenConceptos Básicos de Análisis Financiero PDFAguekeNoch keine Bewertungen
- InformeDokument1 SeiteInformeAguekeNoch keine Bewertungen
- Informe Circuito RCDokument8 SeitenInforme Circuito RCAguekeNoch keine Bewertungen
- RazonesanalisisfiancieroDokument1 SeiteRazonesanalisisfiancieroAguekeNoch keine Bewertungen
- Lab 2. FMDokument2 SeitenLab 2. FMAguekeNoch keine Bewertungen
- Conceptos Básicos de Análisis Financiero PDFDokument64 SeitenConceptos Básicos de Análisis Financiero PDFAguekeNoch keine Bewertungen
- Lab 2. FMDokument2 SeitenLab 2. FMAguekeNoch keine Bewertungen
- Propuesta Estadio de SoftbolDokument8 SeitenPropuesta Estadio de Softbolpaula herediaNoch keine Bewertungen
- El Modelo de ProgramaciónDokument2 SeitenEl Modelo de ProgramaciónAdams uniNoch keine Bewertungen
- Teoria CRMDokument8 SeitenTeoria CRMMiguel Alessandro Avalos ParoyNoch keine Bewertungen
- Estado de Cuenta AH CR93015202001312577982Dokument4 SeitenEstado de Cuenta AH CR93015202001312577982Deybbi Jimenez SolanoNoch keine Bewertungen
- Caso Practico Unidad 1 - 1 - CRMDokument4 SeitenCaso Practico Unidad 1 - 1 - CRMCarlos HstlNoch keine Bewertungen
- Owdmm 05 PDFDokument34 SeitenOwdmm 05 PDFalvaro junior duran bustamanteNoch keine Bewertungen
- Ricardo - Corrotea - Control 3Dokument6 SeitenRicardo - Corrotea - Control 3ricardo corrotea100% (1)
- GFPInFn135nGuiandenAprendizajenn1n1 326054cfdc693e0Dokument9 SeitenGFPInFn135nGuiandenAprendizajenn1n1 326054cfdc693e0Carmen MartinezNoch keine Bewertungen
- Manejo ObjecionesDokument1 SeiteManejo Objecionesju koNoch keine Bewertungen
- Evaluación de Resultados (Respuestas)Dokument5 SeitenEvaluación de Resultados (Respuestas)Nicole GualloNoch keine Bewertungen
- Ficha de Registro en DinaDokument6 SeitenFicha de Registro en DinaGermain Rider FigueroaNoch keine Bewertungen
- Informe de Actividades I.E.D. San Juan de RiosecoDokument5 SeitenInforme de Actividades I.E.D. San Juan de RiosecoJose Luis SanchezNoch keine Bewertungen
- APLICACIONES AluminioDokument4 SeitenAPLICACIONES AluminioRoger BarriaNoch keine Bewertungen
- 5 Procedimiento para Uso y Manejo de Extintores PPR-P-UMEDokument7 Seiten5 Procedimiento para Uso y Manejo de Extintores PPR-P-UMEbastian muñozNoch keine Bewertungen
- Silabo Circuitos Electricos I 2023-CDokument7 SeitenSilabo Circuitos Electricos I 2023-Cgiampier aquino peredaNoch keine Bewertungen
- Catalogo SamsungDokument7 SeitenCatalogo SamsungjonathanNoch keine Bewertungen
- Apuntes de Mixing SecretsDokument4 SeitenApuntes de Mixing SecretsJavier SánchezNoch keine Bewertungen
- Marca de ServidoresDokument13 SeitenMarca de ServidoresTec MusicNoch keine Bewertungen
- Riesgos Inherentes de Un Proceso de Logistica PDFDokument3 SeitenRiesgos Inherentes de Un Proceso de Logistica PDFandrescamilo7Noch keine Bewertungen
- Guía de Actividades y Rúbrica de Evaluación - Unidad 5 - Fase 6 - Proponer Un Modelo de Gestión de Inventarios para Una EmpresaDokument8 SeitenGuía de Actividades y Rúbrica de Evaluación - Unidad 5 - Fase 6 - Proponer Un Modelo de Gestión de Inventarios para Una EmpresaJhon HenryNoch keine Bewertungen
- Clase Metodos Estadisticos 16 de SeptiembreDokument14 SeitenClase Metodos Estadisticos 16 de Septiembrejulian gonzalezNoch keine Bewertungen
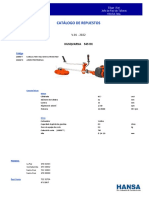
- Desbrozadora 545RXDokument20 SeitenDesbrozadora 545RXEdgar UluriNoch keine Bewertungen
- Geominas 89Dokument76 SeitenGeominas 89GEOMINASNoch keine Bewertungen
- Manual de Usuario: WWW - Viceroysmartpro.EsDokument13 SeitenManual de Usuario: WWW - Viceroysmartpro.Esjules.motttteNoch keine Bewertungen
- Sesión 13 - Programación y Aplicaciones Con PLC - SDokument17 SeitenSesión 13 - Programación y Aplicaciones Con PLC - SJhonatan Gabriel Briones VelasquezNoch keine Bewertungen
- Pa-61 Baque Jacome Deber 02Dokument14 SeitenPa-61 Baque Jacome Deber 02AllanNoch keine Bewertungen
- DSM Actividad 2Dokument9 SeitenDSM Actividad 2deya6277Noch keine Bewertungen
- Infografia Iso9001 2015Dokument2 SeitenInfografia Iso9001 2015Cristhian TonNoch keine Bewertungen
- Applications With Azure Cloud and Windows Containers (Ebook) Es EsDokument75 SeitenApplications With Azure Cloud and Windows Containers (Ebook) Es EsJavier GuerreroNoch keine Bewertungen
- Análisis - Árbol de DecisionesDokument31 SeitenAnálisis - Árbol de DecisionesJoaquin AguirreNoch keine Bewertungen