Das könnte Ihnen auch gefallen
- Funcion EscalonadaDokument3 SeitenFuncion EscalonadaEdgarYadhirPerezHernandez60% (10)
- Plan de Respaldo y Restauración de Datos para El ProyectoDokument5 SeitenPlan de Respaldo y Restauración de Datos para El ProyectoDiego Alejandro Restrepo FlorezNoch keine Bewertungen
- Servicios de Datos de Una Sola FuenteDokument34 SeitenServicios de Datos de Una Sola FuenteAlondra Lopez TiradoNoch keine Bewertungen
- P-SR-MAM-02 Incidentes Ambientales PDFDokument6 SeitenP-SR-MAM-02 Incidentes Ambientales PDFAlberto Chávez AngelesNoch keine Bewertungen
- Matriz de ComunicacionDokument1 SeiteMatriz de ComunicacionAlberto Chávez AngelesNoch keine Bewertungen
- P-SR-MAM-01 Identificacion y Evaluacion Aspectos Ambientales PDFDokument13 SeitenP-SR-MAM-01 Identificacion y Evaluacion Aspectos Ambientales PDFAlberto Chávez AngelesNoch keine Bewertungen
- Instrumentos de Medición ElectricaDokument15 SeitenInstrumentos de Medición ElectricaYsmari FigueroaNoch keine Bewertungen
- Informe Arenera La MolinaDokument29 SeitenInforme Arenera La MolinaAlberto Chávez Angeles100% (1)
- 1.00 Ubicacion-R02Dokument1 Seite1.00 Ubicacion-R02Alberto Chávez AngelesNoch keine Bewertungen
- Jorge Pardo1Dokument18 SeitenJorge Pardo1Alberto Chávez AngelesNoch keine Bewertungen
- GS15-1505073 1509021 - Febrero 2015Dokument5 SeitenGS15-1505073 1509021 - Febrero 2015Alberto Chávez AngelesNoch keine Bewertungen
- Control de Asistencia Jornada de Trabajo y RefrigerioDokument1 SeiteControl de Asistencia Jornada de Trabajo y RefrigerioAlberto Chávez AngelesNoch keine Bewertungen
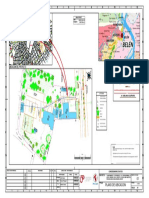
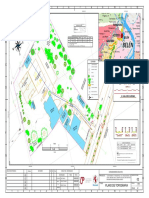
- 2.00 Plano de TopografiaR02Dokument3 Seiten2.00 Plano de TopografiaR02Alberto Chávez AngelesNoch keine Bewertungen
- Actualizada VEHICULOS LIVIANOS Y EQUIPOS MOVILES PRV 962Dokument56 SeitenActualizada VEHICULOS LIVIANOS Y EQUIPOS MOVILES PRV 962Alberto Chávez Angeles100% (1)
- SUSTANCIAS QUIMICAS PELIGROSAS - GRUPO TOSOL S.A.C. EvlreconvDokument24 SeitenSUSTANCIAS QUIMICAS PELIGROSAS - GRUPO TOSOL S.A.C. EvlreconvAlberto Chávez AngelesNoch keine Bewertungen
- PROTECCION DE MAQUINAS - GRUPO TOSOL SAC EvlreconvDokument35 SeitenPROTECCION DE MAQUINAS - GRUPO TOSOL SAC EvlreconvAlberto Chávez AngelesNoch keine Bewertungen
- Memoria Descriptiva - La PerlaDokument2 SeitenMemoria Descriptiva - La PerlaAlberto Chávez AngelesNoch keine Bewertungen
- Phantom 4 Pro PDFDokument4 SeitenPhantom 4 Pro PDFAlberto Chávez AngelesNoch keine Bewertungen
- P-SR-MAM-03 Inspecciones Ambientales PDFDokument3 SeitenP-SR-MAM-03 Inspecciones Ambientales PDFAlberto Chávez AngelesNoch keine Bewertungen
- Anexo 4A - GPS Diferencial LeicaDokument4 SeitenAnexo 4A - GPS Diferencial LeicaAlberto Chávez AngelesNoch keine Bewertungen
- RA-RAU-MAP-AIN-EST-008 Auditorías InternasDokument5 SeitenRA-RAU-MAP-AIN-EST-008 Auditorías InternasAlberto Chávez AngelesNoch keine Bewertungen
- Anexo C Phantom 4 Pro PDFDokument4 SeitenAnexo C Phantom 4 Pro PDFAlberto Chávez AngelesNoch keine Bewertungen
- Especificaciones GPS-DroneDokument9 SeitenEspecificaciones GPS-DroneAlberto Chávez AngelesNoch keine Bewertungen
- Asys Computadores - Asyscom - Telfonos 57 3027975159 Lista de Precios Generated On 22-02-2023 02-06-52Dokument38 SeitenAsys Computadores - Asyscom - Telfonos 57 3027975159 Lista de Precios Generated On 22-02-2023 02-06-52David MonroyNoch keine Bewertungen
- Taller 6 TECNICAS PARA LA DIGITACION DE TEXTOSDokument14 SeitenTaller 6 TECNICAS PARA LA DIGITACION DE TEXTOSJey Zambrano LipeNoch keine Bewertungen
- ATT Julio 19Dokument4 SeitenATT Julio 19Miguel Angel de la CruzNoch keine Bewertungen
- Proyecto N-Trip 21-10-16Dokument105 SeitenProyecto N-Trip 21-10-16carlosNoch keine Bewertungen
- Windows LoaderDokument5 SeitenWindows LoaderAlegre Mariachi LocoNoch keine Bewertungen
- Fassio Intro A La Metodologia Cap VII PDFDokument22 SeitenFassio Intro A La Metodologia Cap VII PDFAdriánRuarteNoch keine Bewertungen
- OBD2 Codigos Error Genericos DTCDokument37 SeitenOBD2 Codigos Error Genericos DTCCarlos Yoraco Romero ZucchiNoch keine Bewertungen
- Productividad Personal - 5to ModuloDokument2 SeitenProductividad Personal - 5to ModuloIrene ValeroNoch keine Bewertungen
- Actividad T1-01-Reporte de InvestigaciónDokument21 SeitenActividad T1-01-Reporte de InvestigaciónHecsali SalinasNoch keine Bewertungen
- Programacion Orientada A ObjetoDokument17 SeitenProgramacion Orientada A ObjetogenaNoch keine Bewertungen
- Cuadro Comparativo Modelos de CalidadDokument7 SeitenCuadro Comparativo Modelos de CalidadMARIO SILVANoch keine Bewertungen
- Tarea 4Dokument2 SeitenTarea 4David RodriguezNoch keine Bewertungen
- Guia de Laboratorio 2 de La Ev 3Dokument2 SeitenGuia de Laboratorio 2 de La Ev 3SirJupiterNoch keine Bewertungen
- Plano Topográfico PT-01 (A2) PDFDokument1 SeitePlano Topográfico PT-01 (A2) PDFDavidVegaNoch keine Bewertungen
- Oraciones InglesDokument2 SeitenOraciones InglesFabian GutierrezNoch keine Bewertungen
- Confiabilidad de SoftwareDokument7 SeitenConfiabilidad de Softwareimvo2100% (1)
- REUNIÓN DE GESTION - 03 Enero 2023 Iris 6 Enero 2023Dokument3 SeitenREUNIÓN DE GESTION - 03 Enero 2023 Iris 6 Enero 2023IrisNoch keine Bewertungen
- Diagramas para AdsDokument13 SeitenDiagramas para AdsYuremita VargasNoch keine Bewertungen
- 12 TicsDokument7 Seiten12 TicsEmanuel RivoiraNoch keine Bewertungen
- Modelo Entidad Relación FerreteriaDokument4 SeitenModelo Entidad Relación FerreteriaBrandon Bello ForeroNoch keine Bewertungen
- Elver Huertas Act. 5Dokument12 SeitenElver Huertas Act. 5Elver HUERTAS RAMIREZNoch keine Bewertungen
- Líneas AbiertasDokument4 SeitenLíneas AbiertasYamir Chalán De La TorreNoch keine Bewertungen
- TAREA FODA Y MATRIZ FODA y GANTT PDFDokument2 SeitenTAREA FODA Y MATRIZ FODA y GANTT PDFYolanda DoicelaNoch keine Bewertungen
- Actividad 01 Criterios de Evaluación de La Primera Unidad - Sintesis PDFDokument3 SeitenActividad 01 Criterios de Evaluación de La Primera Unidad - Sintesis PDFJorge Mostiga100% (2)
- Polling - Miguel SalasDokument9 SeitenPolling - Miguel SalasMiguel SalasNoch keine Bewertungen
- ImprentaDokument217 SeitenImprentaMarianela de MartìnezNoch keine Bewertungen