Das könnte Ihnen auch gefallen
- Skematik DSNDokument1 SeiteSkematik DSNAsrul YanuarNoch keine Bewertungen
- Faculty of Electrical and Electronic Engineering 2020 - 2021Dokument37 SeitenFaculty of Electrical and Electronic Engineering 2020 - 2021Thinh LêNoch keine Bewertungen
- Gambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DCDokument4 SeitenGambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DCLukman AriyantoNoch keine Bewertungen
- Transformer Voltage Regulator Rectifier Input C3 C1Dokument1 SeiteTransformer Voltage Regulator Rectifier Input C3 C1Waqas AhmadNoch keine Bewertungen
- 3921 Fig 02Dokument1 Seite3921 Fig 02Matheus Régis Dias100% (2)
- Proteus LEDDokument3 SeitenProteus LEDMuhammad Zikri AbdillahNoch keine Bewertungen
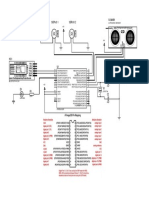
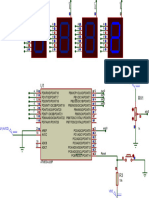
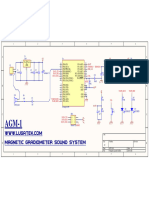
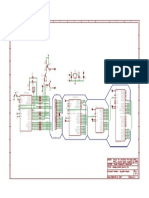
- Schematic Inductor Meter 2022-01-19 FiyoihfdnyDokument1 SeiteSchematic Inductor Meter 2022-01-19 FiyoihfdnyIpoelNoch keine Bewertungen
- Arduino Mini Schematic05Dokument1 SeiteArduino Mini Schematic05Mina BetraNoch keine Bewertungen
- Drill 2.0 Basic I-O Switching TheoryDokument13 SeitenDrill 2.0 Basic I-O Switching TheoryDuaneNoch keine Bewertungen
- Avr Doctor SchematicDokument1 SeiteAvr Doctor Schematiczoran_stev100% (1)
- Minimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriDokument1 SeiteMinimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriJeAmmy BelajarSabarrNoch keine Bewertungen
- 8-Bit Microcontroller With 2K Bytes In-System Programmable Flash Attiny2313/V PreliminaryDokument21 Seiten8-Bit Microcontroller With 2K Bytes In-System Programmable Flash Attiny2313/V PreliminarySALAH NETNoch keine Bewertungen
- Attiny2313 20siDokument227 SeitenAttiny2313 20sichencswNoch keine Bewertungen
- Proteusultimo PDFDokument1 SeiteProteusultimo PDFxavier ortizNoch keine Bewertungen
- ATtiny2313 DatasheetDokument224 SeitenATtiny2313 DatasheetIonut AlexeNoch keine Bewertungen
- Microcontroller With 2K Bytes In-System Programmable Flash: FeaturesDokument17 SeitenMicrocontroller With 2K Bytes In-System Programmable Flash: FeaturesPabloNoch keine Bewertungen
- Atmega8 LCD TimerDokument1 SeiteAtmega8 LCD TimerВадим МкртчянNoch keine Bewertungen
- At Tiny 2313Dokument228 SeitenAt Tiny 2313Si BasNoch keine Bewertungen
- Attiny26 CompleteDokument182 SeitenAttiny26 CompleteSandeep DavidNoch keine Bewertungen
- ZZZZDokument1 SeiteZZZZid musicNoch keine Bewertungen
- 4 Seven Segment1Dokument12 Seiten4 Seven Segment1faruqNoch keine Bewertungen
- ATMEGA8A ATMELCorporation PDFDokument320 SeitenATMEGA8A ATMELCorporation PDFtomas EdisonNoch keine Bewertungen
- 310010023Dokument13 Seiten310010023setiawanrezieNoch keine Bewertungen
- PIC PWM ControllerDokument10 SeitenPIC PWM Controllerkeitabando100% (2)
- Water Level ControllerDokument1 SeiteWater Level ControllerFarizi OsmanNoch keine Bewertungen
- D2 Ldr1Dokument1 SeiteD2 Ldr1Guilherme Souza SanchezNoch keine Bewertungen
- Arduino Leonardo Schematic 3bDokument2 SeitenArduino Leonardo Schematic 3bFlorin VonuNoch keine Bewertungen
- Approg SCHDokument1 SeiteApprog SCHAkikoYuukiNoch keine Bewertungen
- 8051 Architecture ?Dokument62 Seiten8051 Architecture ?Camilo SilvaNoch keine Bewertungen
- Reference DesignDokument1 SeiteReference Designphiu100% (1)
- AVR and C Programming FinalDokument58 SeitenAVR and C Programming Finalzbhp zNoch keine Bewertungen
- Avr Isp Usb AioDokument1 SeiteAvr Isp Usb Aiospy004100% (1)
- Drill 6.0 Adc Dac Sensors Part 2Dokument14 SeitenDrill 6.0 Adc Dac Sensors Part 2DuaneNoch keine Bewertungen
- ATmega8L Microcontrolador Dentro Del ServoDokument24 SeitenATmega8L Microcontrolador Dentro Del ServoLeonardo Andres MagiNoch keine Bewertungen
- Course No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsDokument7 SeitenCourse No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsChetona DasNoch keine Bewertungen
- 4 IOports v21Dokument24 Seiten4 IOports v21Thao Vo VanNoch keine Bewertungen
- Microcontroller With 2/4K Bytes In-System Programmable FlashDokument22 SeitenMicrocontroller With 2/4K Bytes In-System Programmable FlashRicardoNoch keine Bewertungen
- ATMEGA328P-AU Basic Schematic KakushinDokument1 SeiteATMEGA328P-AU Basic Schematic KakushinSajad DehghanNoch keine Bewertungen
- CKT DiagramDokument1 SeiteCKT Diagramelisario JoseNoch keine Bewertungen
- At Mega 8Dokument310 SeitenAt Mega 8nntuonNoch keine Bewertungen
- 8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LDokument310 Seiten8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LoyeshsNoch keine Bewertungen
- RedBoard SchematicDokument1 SeiteRedBoard SchematicGagan Verma GvrNoch keine Bewertungen
- Pertemuan 1 Skematik Sistem MinimumDokument1 SeitePertemuan 1 Skematik Sistem MinimumETC CLASSNoch keine Bewertungen
- Datasheet PDFDokument211 SeitenDatasheet PDFDavid VelasteguíNoch keine Bewertungen
- MPI4Dokument12 SeitenMPI4Sohira QaziNoch keine Bewertungen
- Ch07 AVR Programming in CDokument54 SeitenCh07 AVR Programming in Csajid rajaNoch keine Bewertungen
- Rangkaian Minimum Sistem: Input DacDokument16 SeitenRangkaian Minimum Sistem: Input DacRahmat EriyantoNoch keine Bewertungen
- DesafioDokument1 SeiteDesafioWilliam Anderson FernandesNoch keine Bewertungen
- UART Interfacing With ARM PrimerDokument13 SeitenUART Interfacing With ARM PrimerSmruti PoreNoch keine Bewertungen
- Energy Saving System Using Thyrister Controler With LCDDokument1 SeiteEnergy Saving System Using Thyrister Controler With LCDSaurav Kumar SahuNoch keine Bewertungen
- Schematic Mcu Card 6 For stm32Dokument1 SeiteSchematic Mcu Card 6 For stm32Lai Viet ThangNoch keine Bewertungen
- Design PCB For Traffic LightDokument1 SeiteDesign PCB For Traffic LightHUY Nguyễn Minh100% (1)
- Schematic PrintsDokument1 SeiteSchematic Printspedromarcosmg04Noch keine Bewertungen
- Schematic - Sismun Line Coci - 2021-11-18Dokument1 SeiteSchematic - Sismun Line Coci - 2021-11-18CAHYA FIRDHOUS100% (1)
- Atmega Fusebit Doctor V2c SCHEMATICDokument1 SeiteAtmega Fusebit Doctor V2c SCHEMATICChu Tiến ThịnhNoch keine Bewertungen
- ATmega8, L PDFDokument23 SeitenATmega8, L PDFVlad VladosNoch keine Bewertungen
- Bargraph RC Signal Reader Meter CircuitDokument1 SeiteBargraph RC Signal Reader Meter Circuitkidal permonoNoch keine Bewertungen
- Pro Micro v11 5V - B Schematics Diagram PDFDokument1 SeitePro Micro v11 5V - B Schematics Diagram PDFAdj100% (1)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsVon EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNoch keine Bewertungen
- 24-Bit, 4-Channel Simultaneous Sampling 1.5 MSPS Precision Alias Free ADCDokument86 Seiten24-Bit, 4-Channel Simultaneous Sampling 1.5 MSPS Precision Alias Free ADCAndres Alejandro JaraNoch keine Bewertungen
- Circuit Cellar 2014.09Dokument84 SeitenCircuit Cellar 2014.09Endréné PócsikNoch keine Bewertungen
- Slau 748 BDokument33 SeitenSlau 748 Bmark dolceyNoch keine Bewertungen
- SIM18 Hardware+Design V1.03Dokument31 SeitenSIM18 Hardware+Design V1.03Ken BennetNoch keine Bewertungen
- Um3B/Um6B System Block Diagram: Chip Nam Chip BacDokument56 SeitenUm3B/Um6B System Block Diagram: Chip Nam Chip BacLương Xuân DẫnNoch keine Bewertungen
- TW28 Datasheet D4en PDFDokument80 SeitenTW28 Datasheet D4en PDFiustinianNoch keine Bewertungen
- 6500Dokument1.118 Seiten6500apeksha_837Noch keine Bewertungen
- ESP8266 AT Release Note PDFDokument4 SeitenESP8266 AT Release Note PDFGround ViewNoch keine Bewertungen
- Open Programmer, An Open Source USB Programmer For PIC, ATMEL AVR, I2C-SPI-MicroWire-OneWire-UNIO EEPROMDokument31 SeitenOpen Programmer, An Open Source USB Programmer For PIC, ATMEL AVR, I2C-SPI-MicroWire-OneWire-UNIO EEPROMDJAMel L100% (1)
- Dell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFDokument61 SeitenDell Inspiron 15 5575 Compal CAL51 LA F121P Rev 1 00A00 PDFDeMzo SMpNoch keine Bewertungen
- LTM 1250 6.1 LTM 1300 6.1: Liebherr Engine D 9508 A7 ZF Transmission TC Tronic With Intarder Converter Shift CouplingDokument151 SeitenLTM 1250 6.1 LTM 1300 6.1: Liebherr Engine D 9508 A7 ZF Transmission TC Tronic With Intarder Converter Shift Couplingabdul basitNoch keine Bewertungen
- Enhanced Serial Peripheral Interface (SPI0)Dokument10 SeitenEnhanced Serial Peripheral Interface (SPI0)Marcio ScarduaNoch keine Bewertungen
- ESC OverviewDokument3 SeitenESC Overviewraytsao65Noch keine Bewertungen
- Very Low Power Application Processor Module For Bluetooth® Low Energy v5.0Dokument31 SeitenVery Low Power Application Processor Module For Bluetooth® Low Energy v5.0cesarNoch keine Bewertungen
- DT Project Sem 4Dokument9 SeitenDT Project Sem 4Utkarsh YadavNoch keine Bewertungen
- 15.3.1 New Spi Slave Module Port List: Two-Way Communications With Your Raspberry Pi: SpiDokument5 Seiten15.3.1 New Spi Slave Module Port List: Two-Way Communications With Your Raspberry Pi: Spiali alilouNoch keine Bewertungen
- BTT SKR V1.4 Instruction ManualDokument12 SeitenBTT SKR V1.4 Instruction ManualMaruf HasanNoch keine Bewertungen
- The Design of Optimized RISC Processor For Edge Artificial Intelligence Based On Custom Instruction Set ExtensionDokument13 SeitenThe Design of Optimized RISC Processor For Edge Artificial Intelligence Based On Custom Instruction Set Extensionmadupiz@gmailNoch keine Bewertungen
- MANUAL DC2026C Arduino Using LTspiceDokument18 SeitenMANUAL DC2026C Arduino Using LTspicexuanthamdhqnNoch keine Bewertungen
- MCP 23017Dokument42 SeitenMCP 23017assdsdffad FreakNoch keine Bewertungen
- Abstract - in This Paper, A Novel Hardware Architecture ofDokument2 SeitenAbstract - in This Paper, A Novel Hardware Architecture ofManikantareddy KotaNoch keine Bewertungen
- Sonix SNC7001A - Spec - V1.5Dokument22 SeitenSonix SNC7001A - Spec - V1.5Imraan RamdjanNoch keine Bewertungen
- Week4 1Dokument34 SeitenWeek4 1Le minhNoch keine Bewertungen
- DRV8303Dokument37 SeitenDRV8303Lu Hoa100% (1)
- Infineon-AN75705 Getting Started With EZ-USB FX3-UserManual-V11 00-EnDokument49 SeitenInfineon-AN75705 Getting Started With EZ-USB FX3-UserManual-V11 00-EnvvviiinnnoooNoch keine Bewertungen
- PIC32MX470 Family Datasheet - 60001185GDokument364 SeitenPIC32MX470 Family Datasheet - 60001185GJuan PachonNoch keine Bewertungen
- Rta Fousb Mon Users ManualDokument28 SeitenRta Fousb Mon Users ManualConduraru Alina100% (1)
- Sunplus SPHE8107H 8107S SoundBar DEMO Board Design Guide V1.0Dokument19 SeitenSunplus SPHE8107H 8107S SoundBar DEMO Board Design Guide V1.0Alain Jaramillo Ruiz100% (1)
- Edge Artix 7 Dev Board User Manual PDFDokument34 SeitenEdge Artix 7 Dev Board User Manual PDFsubashNoch keine Bewertungen
- ADE7953 EnergyMeterDokument2 SeitenADE7953 EnergyMeterKram Nhoj TabatabNoch keine Bewertungen