Das könnte Ihnen auch gefallen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6Noch keine Bewertungen
- Damping RatioDokument5 SeitenDamping RatioIvan BelupuNoch keine Bewertungen
- PHY222 Report TemplateDokument12 SeitenPHY222 Report TemplateLinton WestNoch keine Bewertungen
- Chapter 3 - Free Damped Vibrations - Mechanical VibrationsDokument21 SeitenChapter 3 - Free Damped Vibrations - Mechanical Vibrationsumangthechamp100% (1)
- DampingDokument20 SeitenDampingjudeekene_403330720100% (1)
- Damping PDFDokument7 SeitenDamping PDFshakerNoch keine Bewertungen
- DampingDokument6 SeitenDampingletter_ashish4444Noch keine Bewertungen
- What Is The Damping ?Dokument20 SeitenWhat Is The Damping ?Charan Tej RudralaNoch keine Bewertungen
- Quantum Dynamics JajajaDokument4 SeitenQuantum Dynamics Jajajajordan lupeNoch keine Bewertungen
- Damping Ratio: Classical MechanicsDokument4 SeitenDamping Ratio: Classical Mechanicsletter_ashish4444100% (1)
- Types of Damping 1. Viscous DampingDokument6 SeitenTypes of Damping 1. Viscous DampingZandro GagoteNoch keine Bewertungen
- Dynamics TheoryDokument5 SeitenDynamics Theoryrahulsgowda.cse22Noch keine Bewertungen
- Vibration - Wikipedia, The Free EncyclopediaDokument7 SeitenVibration - Wikipedia, The Free Encyclopediadidodido_67Noch keine Bewertungen
- DampingDokument7 SeitenDampingManP13Noch keine Bewertungen
- Viscoelastic Damping 101: Paul Macioce, Roush Industries, IncDokument3 SeitenViscoelastic Damping 101: Paul Macioce, Roush Industries, IncvdertiNoch keine Bewertungen
- Damping FantasticDokument20 SeitenDamping FantastickapolaNoch keine Bewertungen
- Effect of Temperature On The Damping Ratio of A Spring Suspension SystemDokument24 SeitenEffect of Temperature On The Damping Ratio of A Spring Suspension SystemviroonprakhunNoch keine Bewertungen
- The IRIS Damage Assessment Methodology: MotivationDokument18 SeitenThe IRIS Damage Assessment Methodology: MotivationTONNoch keine Bewertungen
- Barry Isolators Selection GuideDokument16 SeitenBarry Isolators Selection GuideJason E. CortésNoch keine Bewertungen
- How Is Damping Quantified?: Henrik SönnerlindDokument11 SeitenHow Is Damping Quantified?: Henrik SönnerlindAyoub FriginiNoch keine Bewertungen
- The Damped Harmonic Oscillator: 1. Mass-Spring SystemDokument10 SeitenThe Damped Harmonic Oscillator: 1. Mass-Spring SystemI AnonymousNoch keine Bewertungen
- Vibrations Lab ReportDokument16 SeitenVibrations Lab ReportJawad Hussain100% (1)
- ACFrOgDvGtCKXg FgH7kBSOJkzhgwzdfwrMqAlVITixAzWDxtz3nYggpK79H6v5bU2jDm-C8JFLho4i6kS6HQhAXi0wtJ2hnUdBBEzE8U5lo Y2Q6x2R7COHjEX1ePjcguO5EwCKd YcBhlowUpSDokument8 SeitenACFrOgDvGtCKXg FgH7kBSOJkzhgwzdfwrMqAlVITixAzWDxtz3nYggpK79H6v5bU2jDm-C8JFLho4i6kS6HQhAXi0wtJ2hnUdBBEzE8U5lo Y2Q6x2R7COHjEX1ePjcguO5EwCKd YcBhlowUpS05ITB Nishant PandeyNoch keine Bewertungen
- VibrationDokument46 SeitenVibrationatulsemiloNoch keine Bewertungen
- Chapter 2-3Dokument15 SeitenChapter 2-3الخليل إبراهيمNoch keine Bewertungen
- Damping: Classical MechanicsDokument161 SeitenDamping: Classical MechanicsanitatippanagoudarNoch keine Bewertungen
- Isolator Selection GuideDokument30 SeitenIsolator Selection GuideRaasik Jain100% (1)
- LESSON 3. Free Vibration With Coulomb DampingDokument5 SeitenLESSON 3. Free Vibration With Coulomb Dampingzyx xyzNoch keine Bewertungen
- Basics of Vibration IsolationDokument8 SeitenBasics of Vibration IsolationRajaSekarsajjaNoch keine Bewertungen
- Research ArticleDokument11 SeitenResearch Article13055Noch keine Bewertungen
- Questions For InvestmentDokument113 SeitenQuestions For InvestmentElfin AntoNoch keine Bewertungen
- RelazioneDokument21 SeitenRelazioneSandeep BhatiaNoch keine Bewertungen
- Vibration Isolation and Transmissibility by WWW Engineering Me UkDokument7 SeitenVibration Isolation and Transmissibility by WWW Engineering Me UkMichaelben MichaelbenNoch keine Bewertungen
- Fundamentals of Mechanics Part 2Dokument4 SeitenFundamentals of Mechanics Part 2vinscarfNoch keine Bewertungen
- Unit I PDFDokument15 SeitenUnit I PDFarunachelamNoch keine Bewertungen
- Chapter One: 1.1 Basic Concepts of VibrationDokument6 SeitenChapter One: 1.1 Basic Concepts of VibrationShuguta LatiNoch keine Bewertungen
- Dynamics of Machine Lect 14Dokument18 SeitenDynamics of Machine Lect 14alangkritamandalNoch keine Bewertungen
- Experiment A1 - Vibration Absorber - AR Copy September2008Dokument12 SeitenExperiment A1 - Vibration Absorber - AR Copy September2008Pawan Kumar YadavNoch keine Bewertungen
- Free Damped VibrationDokument50 SeitenFree Damped VibrationPraful KhondeNoch keine Bewertungen
- EQ-Basics of Structural Dynamics-PGPDokument55 SeitenEQ-Basics of Structural Dynamics-PGPParesh PatelNoch keine Bewertungen
- EQ Engg 4Dokument41 SeitenEQ Engg 4umairNoch keine Bewertungen
- 03 Free VibrationDokument24 Seiten03 Free VibrationnonaNoch keine Bewertungen
- Determining Hysteresis Damping in A Steam Turbine Blade Using Lazan's LawDokument3 SeitenDetermining Hysteresis Damping in A Steam Turbine Blade Using Lazan's LawTalha Ensar BaşNoch keine Bewertungen
- Handouts On DOMDokument10 SeitenHandouts On DOMGitanj ShethNoch keine Bewertungen
- Leyton Hurtado OlivarDokument8 SeitenLeyton Hurtado Olivarjorge hurtadoNoch keine Bewertungen
- Elastisitas Hukum Hooke: Free Vibration Without DampingDokument13 SeitenElastisitas Hukum Hooke: Free Vibration Without DampingIntanSarahitaNNoch keine Bewertungen
- Meng331 Lab 2 12434Dokument18 SeitenMeng331 Lab 2 12434Ahmad Mohammad Abu GabahNoch keine Bewertungen
- 02 Introduction To Shock and VibrationDokument34 Seiten02 Introduction To Shock and Vibrationkostarica123100% (1)
- Vibration IsolatorsDokument27 SeitenVibration Isolatorssachidananda basaral100% (2)
- Noise and Vibrations HVACDokument56 SeitenNoise and Vibrations HVACBalasubramani vNoch keine Bewertungen
- The Equivalent Solution Is A Mathematical Technique Used in Vibration Engineering To Simplify The Analysis of Complex Vibrating SystemsDokument4 SeitenThe Equivalent Solution Is A Mathematical Technique Used in Vibration Engineering To Simplify The Analysis of Complex Vibrating SystemsReinhart Levin Russ NicolasNoch keine Bewertungen
- Vibration 2Dokument8 SeitenVibration 2raymark deguzman100% (3)
- GENG0005 13 Vibrations2Dokument4 SeitenGENG0005 13 Vibrations2Aholu JoshuaNoch keine Bewertungen
- Unit IDokument15 SeitenUnit IAshlin AarthiNoch keine Bewertungen
- RR DocumentDokument4 SeitenRR DocumentPawara WijewardhanaNoch keine Bewertungen
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Von EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Noch keine Bewertungen
- The Single Cure: Human Life Extension to 300+ YearsVon EverandThe Single Cure: Human Life Extension to 300+ YearsNoch keine Bewertungen
- Inertia Dynamic TypeFSB SpecsheetDokument4 SeitenInertia Dynamic TypeFSB SpecsheetElectromateNoch keine Bewertungen
- Internship Report EmaanzDokument29 SeitenInternship Report EmaanzMuhammad MawizNoch keine Bewertungen
- Star Life Cycle Web Activity v2Dokument6 SeitenStar Life Cycle Web Activity v2blackwellbertNoch keine Bewertungen
- Plant Maintenance and Work Service - Practice: March 9, 2021Dokument20 SeitenPlant Maintenance and Work Service - Practice: March 9, 2021THEOPHILUS ATO FLETCHERNoch keine Bewertungen
- G 08Dokument7 SeitenG 08zbkt07Noch keine Bewertungen
- UN Soal Dan JawabanDokument10 SeitenUN Soal Dan JawabanTeja HudayaNoch keine Bewertungen
- Conf Telecom April2012Dokument4 SeitenConf Telecom April2012Harish KurupNoch keine Bewertungen
- Ucarsol LEDokument3 SeitenUcarsol LEharry_chemNoch keine Bewertungen
- GDI 14 - Exploration Aff - Lundeen-Langr-PointerDokument213 SeitenGDI 14 - Exploration Aff - Lundeen-Langr-PointerGabrielj348100% (1)
- Sekiro: See Runtime Message Report For Warning MessagesDokument1 SeiteSekiro: See Runtime Message Report For Warning MessagesĐinh Hoàng ViệtNoch keine Bewertungen
- Article Review CSR 7Dokument2 SeitenArticle Review CSR 7Gwendoline BoucherNoch keine Bewertungen
- An Experimental Study On Usage of Hollow Glass Spheres (HGS) For Reducing Mud Density in Geothermal DrillingDokument7 SeitenAn Experimental Study On Usage of Hollow Glass Spheres (HGS) For Reducing Mud Density in Geothermal DrillingifebrianNoch keine Bewertungen
- Kiln Thruster LogicDokument3 SeitenKiln Thruster LogicSameer kumar GOGOI0% (1)
- A Level Physics Units & SymbolDokument3 SeitenA Level Physics Units & SymbolXian Cong KoayNoch keine Bewertungen
- Adafruit Arduino Lesson 14 Servo Motors - En.idDokument14 SeitenAdafruit Arduino Lesson 14 Servo Motors - En.idHabibul ChairNoch keine Bewertungen
- EIR 221 Prac 3 Guide 2017Dokument5 SeitenEIR 221 Prac 3 Guide 2017mpaka felliNoch keine Bewertungen
- Science8 q1 Mod3 Potential-And-kinetic-Energy v2Dokument23 SeitenScience8 q1 Mod3 Potential-And-kinetic-Energy v2Keith Genesis Ruiz AglubaNoch keine Bewertungen
- 2011+FEID OnlineallDokument160 Seiten2011+FEID OnlineallMeghhsNoch keine Bewertungen
- 4 LJ Energy ModelDokument30 Seiten4 LJ Energy Modelbobbyy222Noch keine Bewertungen
- Our Technology Background Framo Cargo Pumping SystemDokument199 SeitenOur Technology Background Framo Cargo Pumping SystemSorescu Radu VasileNoch keine Bewertungen
- Aa5tb Magnetic Loop v1Dokument9 SeitenAa5tb Magnetic Loop v1api-3839541Noch keine Bewertungen
- Wireless Power Theft Monitering - 2Dokument22 SeitenWireless Power Theft Monitering - 2chakri1327Noch keine Bewertungen
- Assignment 1 Reservoir EngineeringDokument4 SeitenAssignment 1 Reservoir EngineeringMarlisa SalamatNoch keine Bewertungen
- Impact of Hot and Cold Aisle Containment On Data Center Temperature and Efficiency PDFDokument14 SeitenImpact of Hot and Cold Aisle Containment On Data Center Temperature and Efficiency PDFdexiNoch keine Bewertungen
- Pulley Systems Printed Handout - HeilmanDokument46 SeitenPulley Systems Printed Handout - HeilmanGerman ToledoNoch keine Bewertungen
- 65043-Ga Rig Air Compressor.Dokument82 Seiten65043-Ga Rig Air Compressor.J&CNoch keine Bewertungen
- Whirlpool Awm 4120Dokument16 SeitenWhirlpool Awm 4120Zoran ProkicNoch keine Bewertungen
- Mechanical EngineeringDokument1 SeiteMechanical EngineeringManjunatha EikilaNoch keine Bewertungen
- Rupsha Power Plant PDFDokument19 SeitenRupsha Power Plant PDFHossain Mohammad MahbubNoch keine Bewertungen
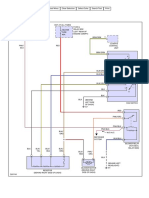
- Calefaccion Mazda 3 2006 - 2010Dokument2 SeitenCalefaccion Mazda 3 2006 - 2010Jhon ConnorNoch keine Bewertungen