Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- CT1 EeDokument1 SeiteCT1 Eedesigner STRNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- CT1 EeDokument1 SeiteCT1 Eedesigner STRNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Performance-Based Design of Tall Reinforced Concrete Ductile Core Wall SystemsDokument9 SeitenPerformance-Based Design of Tall Reinforced Concrete Ductile Core Wall Systemsdesigner STRNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
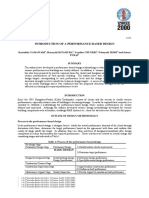
- Introduction of A Performance-Based DesignDokument8 SeitenIntroduction of A Performance-Based DesignEdgarNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Seismic Evaluation of RC Framed Building With and Without Shear Walls (Performance Based DesignDokument9 SeitenSeismic Evaluation of RC Framed Building With and Without Shear Walls (Performance Based Designdesigner STRNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Behaviour of Laterally Loaded Piles in C PDFDokument3 SeitenBehaviour of Laterally Loaded Piles in C PDFdesigner STRNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Application of Capacity Spectrum Method Based On ATC 40 and BNBC 1993Dokument4 SeitenApplication of Capacity Spectrum Method Based On ATC 40 and BNBC 1993designer STRNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Performance Based Evaluation of Shear Walled RCC Building by Pushover AnalysisDokument4 SeitenPerformance Based Evaluation of Shear Walled RCC Building by Pushover AnalysisIJMERNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- VLai Final 2010Dokument11 SeitenVLai Final 2010designer STRNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- 9713 PDFDokument11 Seiten9713 PDFosman kayaNoch keine Bewertungen
- An Efficient Performance-Based Seismic Design Method For Reinforced Concrete FramesDokument21 SeitenAn Efficient Performance-Based Seismic Design Method For Reinforced Concrete Framesdesigner STRNoch keine Bewertungen
- 103820140309Dokument31 Seiten103820140309structure123Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- BoS Agenda Updated-1Dokument5 SeitenBoS Agenda Updated-1designer STRNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- IET DR. R.M.L. AVADH UNIVERSITY EVALUATION SCHEME & SYLLABUS FOR B.TECH. CIVILDokument25 SeitenIET DR. R.M.L. AVADH UNIVERSITY EVALUATION SCHEME & SYLLABUS FOR B.TECH. CIVILdesigner STRNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Non Creamy LayerDokument2 SeitenNon Creamy LayerMohammed Favas ChembanNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- IIT Patna No-Objection Certificate FormDokument1 SeiteIIT Patna No-Objection Certificate Formdesigner STRNoch keine Bewertungen
- PHD Attach DeclarationDokument1 SeitePHD Attach DeclarationaleyhaiderNoch keine Bewertungen
- Form III: No-Objection Certificate For Part-Time StudentsDokument1 SeiteForm III: No-Objection Certificate For Part-Time Studentsdesigner STRNoch keine Bewertungen
- Indian Institute of Technology Patna: Form IDokument1 SeiteIndian Institute of Technology Patna: Form Idesigner STRNoch keine Bewertungen
- PHD Attach Anex 2Dokument1 SeitePHD Attach Anex 2designer STRNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Admit Card AldDokument2 SeitenAdmit Card Alddesigner STRNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Notification Details (Direct Recruitment) : Public Service Commission U.P., Allahabad लोक सेवा आयोग उ0 0, इलाहाबादDokument2 SeitenNotification Details (Direct Recruitment) : Public Service Commission U.P., Allahabad लोक सेवा आयोग उ0 0, इलाहाबादdesigner STRNoch keine Bewertungen
- Non Linear Static Analysis of Dual RC Frame Structure: Sauhardra Ojha, Arunendra Mishra, Mohd Firoj, and Dr.K.NarayanDokument10 SeitenNon Linear Static Analysis of Dual RC Frame Structure: Sauhardra Ojha, Arunendra Mishra, Mohd Firoj, and Dr.K.Narayandesigner STRNoch keine Bewertungen
- Ssconline - Nic.in - Jeregistration - Payment - Response RavindraDokument1 SeiteSsconline - Nic.in - Jeregistration - Payment - Response Ravindradesigner STRNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- MMM JudgementDokument3 SeitenMMM Judgementdesigner STRNoch keine Bewertungen
- An Experimental Study To Analyse The Behaviour of Piled Raft Foundation Model Under The Application of Vertical LoadDokument17 SeitenAn Experimental Study To Analyse The Behaviour of Piled Raft Foundation Model Under The Application of Vertical Loaddesigner STRNoch keine Bewertungen
- Ssconline - Nic.in Jeregistration Payment ResponseDokument1 SeiteSsconline - Nic.in Jeregistration Payment Responsedesigner STRNoch keine Bewertungen
- BNBC Part 6-Chap 1 - 26-08-2012Dokument25 SeitenBNBC Part 6-Chap 1 - 26-08-2012Tanvir IslamNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Sspsi PDFDokument12 SeitenSspsi PDFdesigner STRNoch keine Bewertungen
- SSI Introduction PDFDokument29 SeitenSSI Introduction PDFdesigner STRNoch keine Bewertungen
- Final Exam, Business EnglishDokument5 SeitenFinal Exam, Business EnglishsubtleserpentNoch keine Bewertungen
- 5.2.1 1539323575 2163Dokument30 Seiten5.2.1 1539323575 2163Brinda TNoch keine Bewertungen
- Theory of Karma ExplainedDokument42 SeitenTheory of Karma ExplainedAKASH100% (1)
- Ra 1425 Rizal LawDokument7 SeitenRa 1425 Rizal LawJulie-Mar Valleramos LabacladoNoch keine Bewertungen
- Assignment 3-WEF-Global Competitive IndexDokument3 SeitenAssignment 3-WEF-Global Competitive IndexNauman MalikNoch keine Bewertungen
- Trends Interiors Architecture Fashion Lifestyle: 6 Spring 2013 Collector's EditionDokument116 SeitenTrends Interiors Architecture Fashion Lifestyle: 6 Spring 2013 Collector's EditionFernanda RaquelNoch keine Bewertungen
- MMS-TRG-OP-02F3 Narrative ReportDokument14 SeitenMMS-TRG-OP-02F3 Narrative ReportCh Ma100% (1)
- ThumbDokument32 SeitenThumbdhapraNoch keine Bewertungen
- V-AMP3: User ManualDokument19 SeitenV-AMP3: User Manualnutmeg_kickerNoch keine Bewertungen
- The Experience of God Being Consciousness BlissDokument376 SeitenThe Experience of God Being Consciousness BlissVivian Hyppolito100% (6)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Residential Water Piping Installation GuideDokument28 SeitenResidential Water Piping Installation GuideMunir RasheedNoch keine Bewertungen
- Biochemical Aspect of DiarrheaDokument17 SeitenBiochemical Aspect of DiarrheaLiz Espinosa0% (1)
- Understanding key abdominal anatomy termsDokument125 SeitenUnderstanding key abdominal anatomy termscassandroskomplexNoch keine Bewertungen
- Swot AnalysisDokument6 SeitenSwot AnalysisSneha SinhaNoch keine Bewertungen
- Love in Plato's SymposiumDokument31 SeitenLove in Plato's Symposiumac12788100% (2)
- Coal Bed Methane GasDokument10 SeitenCoal Bed Methane GasErrol SmytheNoch keine Bewertungen
- Dance Manual W. Learning Outcomes PDFDokument8 SeitenDance Manual W. Learning Outcomes PDFJoshua Quijano LamzonNoch keine Bewertungen
- Mendoza CasesDokument66 SeitenMendoza Casespoiuytrewq9115Noch keine Bewertungen
- What Would Orwell Think?Dokument4 SeitenWhat Would Orwell Think?teapottingsNoch keine Bewertungen
- 8086 ProgramsDokument61 Seiten8086 ProgramsBmanNoch keine Bewertungen
- Toe Movement - v22 Print FormatDokument10 SeitenToe Movement - v22 Print FormatbensonNoch keine Bewertungen
- Drainage Pipe Unit Price AnalysisDokument9 SeitenDrainage Pipe Unit Price Analysis朱叶凡Noch keine Bewertungen
- 5528 L1 L2 Business Admin Unit Pack v4Dokument199 Seiten5528 L1 L2 Business Admin Unit Pack v4Yousef OlabiNoch keine Bewertungen
- Doña PerfectaDokument317 SeitenDoña PerfectadracbullNoch keine Bewertungen
- Apexocardiograma Precizari PracticeDokument12 SeitenApexocardiograma Precizari PracticeDaniel VelciuNoch keine Bewertungen
- Reviewer in Intermediate Accounting IDokument9 SeitenReviewer in Intermediate Accounting ICzarhiena SantiagoNoch keine Bewertungen
- LEGAL STATUs of A PersonDokument24 SeitenLEGAL STATUs of A Personpravas naikNoch keine Bewertungen
- GUCR Elections Information 2017-2018Dokument10 SeitenGUCR Elections Information 2017-2018Alexandra WilliamsNoch keine Bewertungen
- PSP, Modern Technologies and Large Scale PDFDokument11 SeitenPSP, Modern Technologies and Large Scale PDFDeepak GehlotNoch keine Bewertungen
- Brinker Insider Trading SuitDokument5 SeitenBrinker Insider Trading SuitDallasObserverNoch keine Bewertungen