Das könnte Ihnen auch gefallen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Power Electronics IntroductionDokument18 SeitenPower Electronics Introductionsagar378Noch keine Bewertungen
- 9A02304 Basic Electrical & Electronics EngineeringDokument8 Seiten9A02304 Basic Electrical & Electronics EngineeringsivabharathamurthyNoch keine Bewertungen
- Vector ScopeDokument3 SeitenVector ScopeAhLevChaNoch keine Bewertungen
- All Classroom Class ExamplesDokument51 SeitenAll Classroom Class ExamplesAhmed Sabri0% (1)
- DC - Ac Inv.Dokument82 SeitenDC - Ac Inv.Jegadeeswari GNoch keine Bewertungen
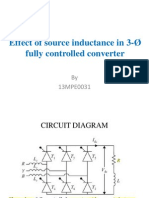
- Effect of Source Inductance in 3Ø Full WaveDokument12 SeitenEffect of Source Inductance in 3Ø Full WaveUmashankar Subramaniam100% (1)
- Scilab - Power Electronics Devices, Circuits and Application - Muhammad. H. RashidDokument241 SeitenScilab - Power Electronics Devices, Circuits and Application - Muhammad. H. RashidMoyses Naves de MoraesNoch keine Bewertungen
- BEE Assignment Even 2020Dokument5 SeitenBEE Assignment Even 2020Aditya PatelNoch keine Bewertungen
- Questions 1Dokument11 SeitenQuestions 1anvithaNoch keine Bewertungen
- 3 Line ConverterDokument10 Seiten3 Line ConverterJay Romar PabianiaNoch keine Bewertungen
- ELEG312+Homework+ 6+solutionsDokument16 SeitenELEG312+Homework+ 6+solutionsMạnh TuấnNoch keine Bewertungen
- DC Link CurrentDokument8 SeitenDC Link CurrentsubbannaNoch keine Bewertungen
- RGPV Syllabus Btech Ee 5 Sem All SubjectsDokument17 SeitenRGPV Syllabus Btech Ee 5 Sem All SubjectsSandeep TaleNoch keine Bewertungen
- Chapter 7 of Fundamentals of MicroelectronicsDokument33 SeitenChapter 7 of Fundamentals of MicroelectronicsjenellaneNoch keine Bewertungen
- CBPSD-lab Manual PDFDokument40 SeitenCBPSD-lab Manual PDFShiv Rajput80% (10)
- 5 BJT e PDFDokument78 Seiten5 BJT e PDFSebastian LMNoch keine Bewertungen
- Load Flow Matrices IIT Roorkee Notes NPTELDokument88 SeitenLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- Single Line Power Network Diagram-KashmirDokument1 SeiteSingle Line Power Network Diagram-KashmirMirza Abdul WarisNoch keine Bewertungen
- 12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationDokument23 Seiten12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationRaghav ChawlaNoch keine Bewertungen
- Electri Circuits Lab Manual 1Dokument11 SeitenElectri Circuits Lab Manual 1Sri RoNoch keine Bewertungen
- Lab Report On ECE 210 Lab1Dokument6 SeitenLab Report On ECE 210 Lab1Joanne Lai100% (1)
- "Bridge B2HZ" For The Control of A DC MotorDokument16 Seiten"Bridge B2HZ" For The Control of A DC MotorhadiNoch keine Bewertungen
- Chapter9 Braking DCDokument43 SeitenChapter9 Braking DCFrozenTuxNoch keine Bewertungen
- Simulation of Switching ConvertersDokument103 SeitenSimulation of Switching ConvertersAshok KumarNoch keine Bewertungen
- 1 Boost - Design (Assign 1)Dokument1 Seite1 Boost - Design (Assign 1)deivasigamaniNoch keine Bewertungen
- Electrical Drives Ans ControlsDokument40 SeitenElectrical Drives Ans Controlsjeyasaravanan77Noch keine Bewertungen
- Class Test - 22423Dokument6 SeitenClass Test - 22423Samadhan ThokalNoch keine Bewertungen
- ELG3311: Solutions For Assignment 1: Problem 2-6Dokument14 SeitenELG3311: Solutions For Assignment 1: Problem 2-6tesfayregs gebretsadik100% (1)
- Reference Frame Theory PDFDokument42 SeitenReference Frame Theory PDFSubaragavanNoch keine Bewertungen
- 8049Dokument239 Seiten8049adnantanNoch keine Bewertungen
- Chapter 8. Reference Circuits An Intuitive Approach (Analog IC Design An Intuitive Approach)Dokument19 SeitenChapter 8. Reference Circuits An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungNoch keine Bewertungen
- Unit Vii Fet AmplifiersDokument14 SeitenUnit Vii Fet AmplifiersAadarsha timilsinaNoch keine Bewertungen
- Clark and Park TransformationDokument9 SeitenClark and Park Transformationjm.mankavil6230100% (1)
- Electrical Machines I Lab Twisted QuestionsDokument4 SeitenElectrical Machines I Lab Twisted QuestionsPranav MenonNoch keine Bewertungen
- Protective Relaying QuizDokument3 SeitenProtective Relaying QuizCattleya Tabor PeñalosaNoch keine Bewertungen
- Ee8004 Modern Power Converters SyllabusDokument2 SeitenEe8004 Modern Power Converters SyllabussignjpcoeNoch keine Bewertungen
- Luo ConverterDokument6 SeitenLuo ConverterAndrei CocorNoch keine Bewertungen
- Power System Simulation - Prof - Jain B. Marshel - ScilabDokument72 SeitenPower System Simulation - Prof - Jain B. Marshel - ScilabJerry ValdezNoch keine Bewertungen
- Circuit Debugging Round1Dokument4 SeitenCircuit Debugging Round1Saravanan JaganNoch keine Bewertungen
- Topology Investigation For Front End DC-DC Power Conversion For Distributed Power SystemDokument332 SeitenTopology Investigation For Front End DC-DC Power Conversion For Distributed Power Systemwouter81100% (4)
- Design and Micro Controller Implementation of A Three Phase SCR Power ConverterDokument8 SeitenDesign and Micro Controller Implementation of A Three Phase SCR Power ConverterIsmael Ochoa JimenezNoch keine Bewertungen
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDokument46 SeitenChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNoch keine Bewertungen
- Giza Systems Ss Zigzag Calculation Xls SheetDokument1 SeiteGiza Systems Ss Zigzag Calculation Xls SheetMohamed ShafeyNoch keine Bewertungen
- Power Electronics Lab ManualDokument89 SeitenPower Electronics Lab ManualPartha DewriNoch keine Bewertungen
- BJT Diff AmplifierDokument15 SeitenBJT Diff AmplifierAdrià Amézaga SàrriesNoch keine Bewertungen
- AC DC DrivesDokument13 SeitenAC DC Drives322399mk7086Noch keine Bewertungen
- Quiz QuestionsDokument3 SeitenQuiz Questionssaiphaneendra_m100% (1)
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDokument6 SeitenZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- Inductor Design Methodology For Power Electronics Applications PDFDokument6 SeitenInductor Design Methodology For Power Electronics Applications PDFpedrovilknNoch keine Bewertungen
- Buck Converter With Current Mode ControlDokument1 SeiteBuck Converter With Current Mode ControlMasaruNakaegawaNoch keine Bewertungen
- r7310205 Electrical Machines IIIDokument4 Seitenr7310205 Electrical Machines IIIsivabharathamurthyNoch keine Bewertungen
- Assignment 1 EPSD LabDokument1 SeiteAssignment 1 EPSD LabChvyNoch keine Bewertungen
- Parallel Capacitor Inverter With Feedback DiodesDokument9 SeitenParallel Capacitor Inverter With Feedback DiodesJayant Kirpekar100% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsVon EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNoch keine Bewertungen
- Power Electronics Converters and their Control for Renewable Energy ApplicationsVon EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNoch keine Bewertungen
- Self-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionDokument11 SeitenSelf-Oscillating Resonant AC/DC Converter Topology For Input Power-Factor CorrectionJie99Noch keine Bewertungen
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDokument10 SeitenLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNoch keine Bewertungen
- Three-Phase Unity Power FactorDokument10 SeitenThree-Phase Unity Power FactorSatya NV0% (1)
- 3-Phase Power Factor Correction, Using Vienna Rectifier ApproachDokument13 Seiten3-Phase Power Factor Correction, Using Vienna Rectifier Approachvdiaz1Noch keine Bewertungen
- Some Topologies of High Quality RectifiersDokument6 SeitenSome Topologies of High Quality RectifiersSatya NVNoch keine Bewertungen
- SingleDokument7 SeitenSingleSatya NVNoch keine Bewertungen
- PWM RectDokument5 SeitenPWM RectSatya NVNoch keine Bewertungen
- PWM Regenerative RectifiersDokument15 SeitenPWM Regenerative RectifiersSatya NVNoch keine Bewertungen
- Power Factor Correction Using Single PhaseDokument5 SeitenPower Factor Correction Using Single PhaseSatya NVNoch keine Bewertungen
- Line Current Harmonics Reduduction by Using RectifiersDokument8 SeitenLine Current Harmonics Reduduction by Using RectifiersSatya NVNoch keine Bewertungen
- A New Three-Phase Power-Factor Correction (PFC)Dokument8 SeitenA New Three-Phase Power-Factor Correction (PFC)Satya NVNoch keine Bewertungen
- Performance Analysis of Direct Power Controlled PWM Rectifier Under Disturbed AC Line VoltageDokument6 SeitenPerformance Analysis of Direct Power Controlled PWM Rectifier Under Disturbed AC Line VoltagecuterithikaNoch keine Bewertungen
- Modeling and Control of Three Phase Boost Rectifiers ViaDokument3 SeitenModeling and Control of Three Phase Boost Rectifiers ViaSatya NVNoch keine Bewertungen
- A Review of Three-Phase Improved Power QualityDokument20 SeitenA Review of Three-Phase Improved Power QualitySatya NV100% (1)
- A Three-Phasteh Ree-Switcthw O-Leveplw M RectifierDokument5 SeitenA Three-Phasteh Ree-Switcthw O-Leveplw M RectifierSatya NVNoch keine Bewertungen
- 2000 PWM Boost Type RectifierDokument4 Seiten2000 PWM Boost Type RectifierSatya NVNoch keine Bewertungen
- PSI AP Physics C - Gauss's Law Multiple Choice QuestionsDokument7 SeitenPSI AP Physics C - Gauss's Law Multiple Choice Questionsanthony solorzanoNoch keine Bewertungen
- Pankaj Final Industrial Training Report 1234Dokument36 SeitenPankaj Final Industrial Training Report 1234pankaj madhheshiyaNoch keine Bewertungen
- 2N3055A (NPN), MJ15015 (NPN), MJ15016 (PNP) Complementary Silicon High Power TransistorsDokument6 Seiten2N3055A (NPN), MJ15015 (NPN), MJ15016 (PNP) Complementary Silicon High Power TransistorsvdăduicăNoch keine Bewertungen
- 2784Dokument4 Seiten2784heribertosfaNoch keine Bewertungen
- Dynasty 200 DXUser ManualDokument98 SeitenDynasty 200 DXUser ManualBill100% (1)
- Dangote Elevator SPL List NewDokument1 SeiteDangote Elevator SPL List NeweliasNoch keine Bewertungen
- Gate-2019 Original Paper - EE/0Dokument33 SeitenGate-2019 Original Paper - EE/0hemanth katkamNoch keine Bewertungen
- E&I QAP's - Submitted To Contractor HZADokument33 SeitenE&I QAP's - Submitted To Contractor HZASuraj ShettyNoch keine Bewertungen
- General CNC InformationDokument63 SeitenGeneral CNC InformationCristopher EntenaNoch keine Bewertungen
- Voltage Amplification, Trail Cable Length & Power ShovelsDokument9 SeitenVoltage Amplification, Trail Cable Length & Power ShovelsMaikPortnoyNoch keine Bewertungen
- Marking Codes Small Signal Transistors and DiodesDokument40 SeitenMarking Codes Small Signal Transistors and DiodesSlimane SlimaneNoch keine Bewertungen
- 20039-11 B11R D11C UniverseDokument225 Seiten20039-11 B11R D11C UniverseDaniel Alex SánchezNoch keine Bewertungen
- Transicool Carrier Xarios - Technical ManualDokument80 SeitenTransicool Carrier Xarios - Technical Manualsimon_someone21788% (24)
- Battery Autonomy Test For Makongo Songas Dar543Dokument11 SeitenBattery Autonomy Test For Makongo Songas Dar543Paul Lazaro Lalah SulleNoch keine Bewertungen
- Physics 1 - Class XIIDokument311 SeitenPhysics 1 - Class XIISunil Nahata100% (1)
- Metal Fire Alarm Station Ms-700U Series: FeaturesDokument2 SeitenMetal Fire Alarm Station Ms-700U Series: FeaturesRicardo TitoNoch keine Bewertungen
- DuFlex Flexible CablesDokument23 SeitenDuFlex Flexible CablesAli FarooqNoch keine Bewertungen
- bc337 PDFDokument4 Seitenbc337 PDFgerluccioniNoch keine Bewertungen
- Rasuwagadhi Hydropower Company LimitedDokument3 SeitenRasuwagadhi Hydropower Company LimitedSubhash MishraNoch keine Bewertungen
- Ae-6b Service Manual 488Dokument52 SeitenAe-6b Service Manual 488fontanieroNoch keine Bewertungen
- Battery StorageDokument44 SeitenBattery StorageMuruganNoch keine Bewertungen
- ELTEK Valere Hybrid SolutionsDokument8 SeitenELTEK Valere Hybrid SolutionsAnonymous jnG2gQEbHNoch keine Bewertungen
- Mind Mapping of WeldingDokument8 SeitenMind Mapping of WeldingFadlanbunglonNoch keine Bewertungen
- W Series Data Sheet 125, 250 Watt AC-DC and DC-DC DIN-Rail Mount ConvertersDokument28 SeitenW Series Data Sheet 125, 250 Watt AC-DC and DC-DC DIN-Rail Mount ConvertersTommy DwiNoch keine Bewertungen
- Hatta PropagationDokument2 SeitenHatta PropagationnikoabdulNoch keine Bewertungen
- Y500 User Manual enDokument115 SeitenY500 User Manual enLêĐứcDũngNoch keine Bewertungen
- Lenovo Legion 5 Pro 16 HMMDokument66 SeitenLenovo Legion 5 Pro 16 HMMJorge LaraNoch keine Bewertungen
- DatasheetDokument7 SeitenDatasheetRon de CañaNoch keine Bewertungen
- Wire Loss CalculatorDokument6 SeitenWire Loss CalculatorPatrick McCourtNoch keine Bewertungen
- 14 Switching Devices Catalog Vol1 Tab2 Ca08100003eDokument126 Seiten14 Switching Devices Catalog Vol1 Tab2 Ca08100003eMusab yassinNoch keine Bewertungen