Das könnte Ihnen auch gefallen
- Ham, Ethan - Tabletop Game Design For Video Game Designers (2016, Focal Press)Dokument348 SeitenHam, Ethan - Tabletop Game Design For Video Game Designers (2016, Focal Press)Lizzy Botello Santiago75% (4)
- Electrical Protection Relay IntroductionDokument200 SeitenElectrical Protection Relay IntroductionmlutfimaNoch keine Bewertungen
- SonoSite MicroMaxx - Ultrasound - Service Manual PDFDokument100 SeitenSonoSite MicroMaxx - Ultrasound - Service Manual PDFVictor Hugo LimaNoch keine Bewertungen
- Motor - 1 Chiller - 1: Water Tank 2000LDokument1 SeiteMotor - 1 Chiller - 1: Water Tank 2000LWaheed MidoNoch keine Bewertungen
- Chestoten Invertor Sv150is5!4!380vac Upravlenie Na Trifazen Elektrodvigatel 15kw 1Dokument213 SeitenChestoten Invertor Sv150is5!4!380vac Upravlenie Na Trifazen Elektrodvigatel 15kw 1Fabian RosalesNoch keine Bewertungen
- Operator'S Manual: 6" Echo SounderDokument52 SeitenOperator'S Manual: 6" Echo SounderDaniel IzquierdoNoch keine Bewertungen
- (Operation & Service Manual) : Poskom High Frequency GeneratorDokument44 Seiten(Operation & Service Manual) : Poskom High Frequency GeneratorWaheed Mido100% (5)
- Rock Drill & SluDokument36 SeitenRock Drill & SluElizabeth Octagon100% (2)
- FCV585 FCV620 Operator's Manual eDokument56 SeitenFCV585 FCV620 Operator's Manual eTran_Manh_Trun_7237Noch keine Bewertungen
- SINUSMDokument217 SeitenSINUSMaoaoaoao1100% (1)
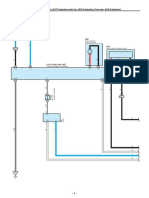
- EPS (TMT Made From Oct. 2017 Production Until Jan. 2018 Production, From Jan. 2018 Production)Dokument8 SeitenEPS (TMT Made From Oct. 2017 Production Until Jan. 2018 Production, From Jan. 2018 Production)Angel Rodríguez100% (1)
- Abc of Power Modules: Functionality, Structure and Handling of a Power ModuleVon EverandAbc of Power Modules: Functionality, Structure and Handling of a Power ModuleNoch keine Bewertungen
- (English) The World in 2050 (The Real Future of Earth) - BBC & Nat Geo DocumentariesDokument30 Seiten(English) The World in 2050 (The Real Future of Earth) - BBC & Nat Geo Documentariesnagendrasteer100% (2)
- A1 SVD Series Servo Motor DriverDokument156 SeitenA1 SVD Series Servo Motor DriverHưng Phan HữuNoch keine Bewertungen
- Mitsubishi Electronics FR E740 User ManualDokument59 SeitenMitsubishi Electronics FR E740 User ManualAkbar SidiqNoch keine Bewertungen
- Tosvert Vf-As3/S15/Mb1 Option Function Manual DEV003Z: NoticeDokument63 SeitenTosvert Vf-As3/S15/Mb1 Option Function Manual DEV003Z: Noticemiguel linaresNoch keine Bewertungen
- FR-D700 Instruction Manual (Basic) InverterDokument60 SeitenFR-D700 Instruction Manual (Basic) InverterIhzam FahrazNoch keine Bewertungen
- G4 6f-Ho1ahd1a080325Dokument110 SeitenG4 6f-Ho1ahd1a080325AlNoch keine Bewertungen
- Mitsubishi Inverter Instruction Manual SummaryDokument61 SeitenMitsubishi Inverter Instruction Manual Summarymarco hernandezNoch keine Bewertungen
- User Manual: PV Off-Grid Inverter With ControllerDokument64 SeitenUser Manual: PV Off-Grid Inverter With ControllerRukhsana BibiNoch keine Bewertungen
- OPERATOR'S MANUAL COLOR INSTRUMENTDokument87 SeitenOPERATOR'S MANUAL COLOR INSTRUMENTAndreyNoch keine Bewertungen
- FR-S 520 S EC/ECR, FR-S 540 EC/ECR: Frequency Inverter Instruction Manual (Basic)Dokument66 SeitenFR-S 520 S EC/ECR, FR-S 540 EC/ECR: Frequency Inverter Instruction Manual (Basic)marianoNoch keine Bewertungen
- Shihlin Electric General Inverters SA3 Series: User ManualDokument384 SeitenShihlin Electric General Inverters SA3 Series: User ManualLUATNoch keine Bewertungen
- Service Manual: Smart Manager / Central Remote ControlDokument53 SeitenService Manual: Smart Manager / Central Remote ControlBarak MalulNoch keine Bewertungen
- Furunon LS 6100Dokument47 SeitenFurunon LS 6100Hoang Anh NguyenNoch keine Bewertungen
- Operator Manualome44940b1 Gp39Dokument98 SeitenOperator Manualome44940b1 Gp39Trency FernandesNoch keine Bewertungen
- SM A11-015 Bms-Sm1280etle en 00Dokument55 SeitenSM A11-015 Bms-Sm1280etle en 00SajidNoch keine Bewertungen
- FR-E840-0170 BLOW InverterDokument78 SeitenFR-E840-0170 BLOW InverterAbdul HameedNoch keine Bewertungen
- IS5 English V2.1 - 0309A4Dokument203 SeitenIS5 English V2.1 - 0309A4inverter stsNoch keine Bewertungen
- CSH-8L Installation ManualDokument95 SeitenCSH-8L Installation ManualAlex BombayNoch keine Bewertungen
- Suntrack Plus Solar Inverter User ManualDokument41 SeitenSuntrack Plus Solar Inverter User Manualyousaf iqbalNoch keine Bewertungen
- Scx21 Operators ManualDokument61 SeitenScx21 Operators ManualKEN HAMERNoch keine Bewertungen
- SPS300 A/B User's Manual: Pressure Sensor/SwitchDokument48 SeitenSPS300 A/B User's Manual: Pressure Sensor/SwitchTạ Điền Minh ẨnNoch keine Bewertungen
- MU170C Operator's ManualDokument65 SeitenMU170C Operator's Manualseanll2563Noch keine Bewertungen
- Model Mp-2S Overspeed Unit Instruction ManualDokument71 SeitenModel Mp-2S Overspeed Unit Instruction ManualNga VũNoch keine Bewertungen
- User'S Manual: Model 3G3Fv-Pdrt1-Sinv1Dokument226 SeitenUser'S Manual: Model 3G3Fv-Pdrt1-Sinv1Stek LabsNoch keine Bewertungen
- Clamping Unit CU400 Users Manual: - Installation InstructionsDokument13 SeitenClamping Unit CU400 Users Manual: - Installation InstructionsEmílio BeckerNoch keine Bewertungen
- Sanmotion R Ad m0010030c-2Dokument374 SeitenSanmotion R Ad m0010030c-2Adilson BorgesNoch keine Bewertungen
- sc33 Operators ManualDokument52 Seitensc33 Operators ManualMarcinNoch keine Bewertungen
- Mixer Amplifiers BG-2035 BG-2060 BG-2120: Operating InstructionsDokument20 SeitenMixer Amplifiers BG-2035 BG-2060 BG-2120: Operating InstructionsR HastomoNoch keine Bewertungen
- Safety Instructions: Warning CautionDokument66 SeitenSafety Instructions: Warning Cautionbd entertainmentNoch keine Bewertungen
- Operator'S Manual: Scanning SonarDokument90 SeitenOperator'S Manual: Scanning SonarCali MelendezNoch keine Bewertungen
- Instruction Manual: Models 4370 R1800 RecorderDokument129 SeitenInstruction Manual: Models 4370 R1800 RecordermihaiisvoranuNoch keine Bewertungen
- Motor Spindle MitsubishiDokument108 SeitenMotor Spindle MitsubishiEDU GAMERNoch keine Bewertungen
- Manual Instalare FR 840 ConvertizorDokument64 SeitenManual Instalare FR 840 ConvertizorJoe JoeNoch keine Bewertungen
- FA SE3-AC-Drive User-Manual V1.03Dokument342 SeitenFA SE3-AC-Drive User-Manual V1.03Angas DaylagunNoch keine Bewertungen
- LG AC Service ManualDokument80 SeitenLG AC Service ManualFrengky RmNoch keine Bewertungen
- Ib 0600497 EngaDokument34 SeitenIb 0600497 EngamohamedNoch keine Bewertungen
- GSK DAT2030 User ManualDokument124 SeitenGSK DAT2030 User ManualArturo FuentesNoch keine Bewertungen
- Teco A510 Manual EN v1Dokument311 SeitenTeco A510 Manual EN v1Alberto S SousaNoch keine Bewertungen
- ●OPSA-150 Instruction Manual EnglishDokument117 Seiten●OPSA-150 Instruction Manual Englishtashiro_rukamanNoch keine Bewertungen
- Mdse SeriesDokument554 SeitenMdse Seriestve cozinhaNoch keine Bewertungen
- FMD3100 Operator's Manual CDokument367 SeitenFMD3100 Operator's Manual CICEMANNoch keine Bewertungen
- Yokogawa RecorderuR1000 43xxx Im D101Dokument129 SeitenYokogawa RecorderuR1000 43xxx Im D101TaufikNoch keine Bewertungen
- LEGENDUsers Version FDokument81 SeitenLEGENDUsers Version Fjose aponteNoch keine Bewertungen
- Operator's Manual for NAVTEX Receiver NX-300Dokument65 SeitenOperator's Manual for NAVTEX Receiver NX-300Bhavin DoshiNoch keine Bewertungen
- Muf 40Dokument24 SeitenMuf 40Paulo RobertoNoch keine Bewertungen
- FR s500 ADokument64 SeitenFR s500 Aadul koharruddin100% (1)
- FR-E700 Instruction Manual (Basic) InverterDokument60 SeitenFR-E700 Instruction Manual (Basic) InverterMarcosNoch keine Bewertungen
- Installation, Operation and Maintenance Manual: SmartstartDokument4 SeitenInstallation, Operation and Maintenance Manual: SmartstartGalih TrisnanugrahaNoch keine Bewertungen
- Felcom-16 Ome-56380-E2Dokument183 SeitenFelcom-16 Ome-56380-E2Nguyen Phuoc HoNoch keine Bewertungen
- User Manual SS3 ShihlinDokument339 SeitenUser Manual SS3 ShihlinhanazahrNoch keine Bewertungen
- Ib1501127engc PDFDokument546 SeitenIb1501127engc PDFYeong Yew KitNoch keine Bewertungen
- Viking WST12MC16S ManualDokument74 SeitenViking WST12MC16S ManualAndrei NotHereNoch keine Bewertungen
- FR A5ncDokument104 SeitenFR A5ncSamuel Martinez RomeroNoch keine Bewertungen
- Sanmotion R Ad M0008957FDokument574 SeitenSanmotion R Ad M0008957FAdilson BorgesNoch keine Bewertungen
- Legend - User's Manual Rev. C B&WDokument76 SeitenLegend - User's Manual Rev. C B&WEdwin Aguila CerónNoch keine Bewertungen
- Nanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsDokument4 SeitenNanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsWaheed MidoNoch keine Bewertungen
- Nanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsDokument4 SeitenNanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsWaheed MidoNoch keine Bewertungen
- Nanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsDokument4 SeitenNanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsWaheed MidoNoch keine Bewertungen
- IRIS Touch 4xxng Series Quick Installation Maintenance Guide 09-12-14!1!1Dokument16 SeitenIRIS Touch 4xxng Series Quick Installation Maintenance Guide 09-12-14!1!1Waheed MidoNoch keine Bewertungen
- 45service Manual3366mvDELTerddgyA MvSIGMgfdA Technical Manual-1Dokument46 Seiten45service Manual3366mvDELTerddgyA MvSIGMgfdA Technical Manual-1Waheed MidoNoch keine Bewertungen
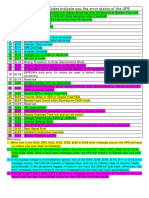
- MSII Error Code ExplanationDokument1 SeiteMSII Error Code ExplanationPanji NgadioNoch keine Bewertungen
- Offer 2015 Siemens Emotion 16 12Dokument2 SeitenOffer 2015 Siemens Emotion 16 12Waheed MidoNoch keine Bewertungen
- Safepower-Evo-Hf: Technical SpecificationsDokument40 SeitenSafepower-Evo-Hf: Technical SpecificationsWaheed MidoNoch keine Bewertungen
- Easy UPS 3S - E3SUPS10KHB2Dokument3 SeitenEasy UPS 3S - E3SUPS10KHB2Waheed MidoNoch keine Bewertungen
- Technical Specifications For Pressure Swing Adsorption (PSA) Oxygen PlantsDokument5 SeitenTechnical Specifications For Pressure Swing Adsorption (PSA) Oxygen Plantszee khanNoch keine Bewertungen
- Faster Diagnoses. Greater Accuracy. Improved Patient Care.: MusculoskeletalDokument2 SeitenFaster Diagnoses. Greater Accuracy. Improved Patient Care.: MusculoskeletalWaheed MidoNoch keine Bewertungen
- Cone Beam RadiazioniDokument4 SeitenCone Beam RadiazioniWaheed MidoNoch keine Bewertungen
- 160A MCCB, 36ka: C:4 (1x50) +e25mmDokument1 Seite160A MCCB, 36ka: C:4 (1x50) +e25mmWaheed MidoNoch keine Bewertungen
- Product Information: X-Ray Tube DF-183 DF-183R DF-183SBRDokument12 SeitenProduct Information: X-Ray Tube DF-183 DF-183R DF-183SBRbudi nugrohoNoch keine Bewertungen
- mvSIGMA-SLC e 2003-02Dokument1 SeitemvSIGMA-SLC e 2003-02Waheed MidoNoch keine Bewertungen
- Product Information: X-Ray Tube DF-183 DF-183R DF-183SBRDokument12 SeitenProduct Information: X-Ray Tube DF-183 DF-183R DF-183SBRbudi nugrohoNoch keine Bewertungen
- Inform Sinus EVO U Ru N Fo Yu en Rev3 1432Dokument2 SeitenInform Sinus EVO U Ru N Fo Yu en Rev3 1432Waheed MidoNoch keine Bewertungen
- Nanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsDokument4 SeitenNanjing Perlove Medical Equipment Co., Ltd - Leading Provider of Mobile Digital Radiography SystemsWaheed MidoNoch keine Bewertungen
- MicroMaxx 3.3 UG ENG P06435-02B e 1 - 1Dokument200 SeitenMicroMaxx 3.3 UG ENG P06435-02B e 1 - 1Waheed MidoNoch keine Bewertungen
- MicroMaxx 3.3 UG ENG P06435-02B e 1 - 1Dokument200 SeitenMicroMaxx 3.3 UG ENG P06435-02B e 1 - 1Waheed MidoNoch keine Bewertungen
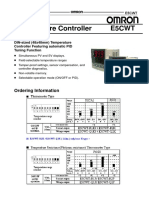
- Temperature Controller E5Cwt: Ordering InformationDokument10 SeitenTemperature Controller E5Cwt: Ordering InformationWaheed MidoNoch keine Bewertungen
- Inform Sinus EVO U Ru N Fo Yu en Rev3 1432Dokument2 SeitenInform Sinus EVO U Ru N Fo Yu en Rev3 1432Waheed MidoNoch keine Bewertungen
- MicroMaxx MusculoskeletalDokument2 SeitenMicroMaxx MusculoskeletalWaheed MidoNoch keine Bewertungen
- IRIS Touch 4xxng Series Quick Installation Maintenance Guide 09 - 12 - 14 1 1Dokument16 SeitenIRIS Touch 4xxng Series Quick Installation Maintenance Guide 09 - 12 - 14 1 1Waheed MidoNoch keine Bewertungen
- Faster Diagnoses. Greater Accuracy. Improved Patient Care.: MusculoskeletalDokument2 SeitenFaster Diagnoses. Greater Accuracy. Improved Patient Care.: MusculoskeletalWaheed MidoNoch keine Bewertungen
- Product Information: X-Ray Tube D-054 D-054S D-054SB Stationary Anode X-Ray TubeDokument10 SeitenProduct Information: X-Ray Tube D-054 D-054S D-054SB Stationary Anode X-Ray TubeWaheed MidoNoch keine Bewertungen
- Easy UPS 3S - E3SUPS10KHB2Dokument3 SeitenEasy UPS 3S - E3SUPS10KHB2Waheed MidoNoch keine Bewertungen
- BUILDING TECH 1 Lect 3 MASONRYDokument42 SeitenBUILDING TECH 1 Lect 3 MASONRYElyzaGutierrezCabacesNoch keine Bewertungen
- Darksoft'S Neogeo Multi Mvs / AesDokument9 SeitenDarksoft'S Neogeo Multi Mvs / AesCarlos Martínez GómezNoch keine Bewertungen
- New Text DocumentDokument3 SeitenNew Text Documentlokendra singhNoch keine Bewertungen
- Canon 70 200 F4 Is Repair en PDFDokument10 SeitenCanon 70 200 F4 Is Repair en PDFfastbuuuuNoch keine Bewertungen
- Społeczność Steam :: Poradnik :: Pathfinder: Kingmaker Cheat Guide Character:Item:kingdom EditingDokument22 SeitenSpołeczność Steam :: Poradnik :: Pathfinder: Kingmaker Cheat Guide Character:Item:kingdom EditingBeki LokaNoch keine Bewertungen
- Hoses - Parker PDFDokument57 SeitenHoses - Parker PDFtjNoch keine Bewertungen
- Landing Gear, Fire ProtectionDokument42 SeitenLanding Gear, Fire ProtectionJeevan BasnyatNoch keine Bewertungen
- Aparna GupatDokument24 SeitenAparna GupatAkshat SaxenaNoch keine Bewertungen
- 03b More On Hyperledger FabricDokument53 Seiten03b More On Hyperledger FabricSecret IntelligenceNoch keine Bewertungen
- 007 Security ManagementDokument13 Seiten007 Security ManagementShibu ArjunanNoch keine Bewertungen
- 2020-03-09 WITS - MECN5005A - Systems Management - Lecture 4 of 10 - Project MNGT - Shared-1Dokument71 Seiten2020-03-09 WITS - MECN5005A - Systems Management - Lecture 4 of 10 - Project MNGT - Shared-1Unarine MutshinyaloNoch keine Bewertungen
- Pengaruh Social Media Marketing Terhadap Customer Bonding Dan Purchase To IntentionDokument8 SeitenPengaruh Social Media Marketing Terhadap Customer Bonding Dan Purchase To IntentionTya Asih Puji LestyaNoch keine Bewertungen
- Calibration: 1 Face The Tires Straight AheadDokument6 SeitenCalibration: 1 Face The Tires Straight AheadTeddy KhantNoch keine Bewertungen
- Conditional Statements 2Dokument10 SeitenConditional Statements 2Abigel judith PeterNoch keine Bewertungen
- 1k BolcfgDokument34 Seiten1k BolcfgTrader 20Noch keine Bewertungen
- Epas11 Diagnostic Test: MULTIPLE CHOICE. DirectionsDokument4 SeitenEpas11 Diagnostic Test: MULTIPLE CHOICE. DirectionsAbanganPorferioNoch keine Bewertungen
- Kent Ridge Campus GuideDokument2 SeitenKent Ridge Campus Guiderevo17Noch keine Bewertungen
- ReadmeDokument10 SeitenReadmeИлиан ИлиевNoch keine Bewertungen
- Manu ResumeDokument2 SeitenManu ResumeManu sNoch keine Bewertungen
- GE461 Intro to Data Science (40chDokument39 SeitenGE461 Intro to Data Science (40chMuhammed NaciNoch keine Bewertungen
- Electronic Cash Register Programming-ManualDokument27 SeitenElectronic Cash Register Programming-ManualRendy Adam FarhanNoch keine Bewertungen
- Productdatasheet Babsl 72 NBR 902Dokument2 SeitenProductdatasheet Babsl 72 NBR 902narayan46Noch keine Bewertungen
- Data Analysis and Time Series for Environmental ApplicationsDokument60 SeitenData Analysis and Time Series for Environmental Applicationskk chanNoch keine Bewertungen
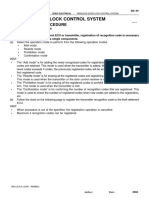
- Wireless Door Lock Control System Registration ProcedureDokument5 SeitenWireless Door Lock Control System Registration Procedureawan wijayantoNoch keine Bewertungen
- AOZ1267QI-01: General Description FeaturesDokument16 SeitenAOZ1267QI-01: General Description Featuresvictory_1410Noch keine Bewertungen