Das könnte Ihnen auch gefallen
- Performance Improvement of Single Phase Motors Using Power ElectronicsDokument7 SeitenPerformance Improvement of Single Phase Motors Using Power ElectronicshezugNoch keine Bewertungen
- Variable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Dokument71 SeitenVariable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. Numan100% (1)
- Variable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Dokument72 SeitenVariable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNoch keine Bewertungen
- Sin EncoderDokument6 SeitenSin Encoderboynew87Noch keine Bewertungen
- Direct Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeDokument7 SeitenDirect Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeAli H. NumanNoch keine Bewertungen
- Variable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Dokument10 SeitenVariable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Ali H. NumanNoch keine Bewertungen
- Vector Control of AC Induction MotorDokument7 SeitenVector Control of AC Induction MotorAli H. NumanNoch keine Bewertungen
- Reduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Dokument2 SeitenReduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Ali H. NumanNoch keine Bewertungen
- Vector Control of Cage Induction Motors A Physical Insight, 1996 PDFDokument10 SeitenVector Control of Cage Induction Motors A Physical Insight, 1996 PDFAli H. NumanNoch keine Bewertungen
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDokument7 SeitenVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNoch keine Bewertungen
- VHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Dokument10 SeitenVHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Ali H. NumanNoch keine Bewertungen
- Modeling and Simulation of A Stepping Motor, 1969.Dokument3 SeitenModeling and Simulation of A Stepping Motor, 1969.Ali H. NumanNoch keine Bewertungen
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDokument7 SeitenVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNoch keine Bewertungen
- DSP Arch Past-Present-FutureDokument14 SeitenDSP Arch Past-Present-FutureSayan GhoshNoch keine Bewertungen
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Dokument7 SeitenDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNoch keine Bewertungen
- Digital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Dokument6 SeitenDigital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Ali H. NumanNoch keine Bewertungen
- A Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Dokument9 SeitenA Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Ali H. NumanNoch keine Bewertungen
- BLDC Resonant PoleDokument8 SeitenBLDC Resonant Poleav5009Noch keine Bewertungen
- Effective Estimation of Speed and Rotor Position Using Kalman FilterDokument7 SeitenEffective Estimation of Speed and Rotor Position Using Kalman FilterAli H. NumanNoch keine Bewertungen
- A New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Dokument9 SeitenA New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Ali H. NumanNoch keine Bewertungen
- Education DTC 380 PDFDokument6 SeitenEducation DTC 380 PDFНебојша МитровићNoch keine Bewertungen
- Zero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Dokument6 SeitenZero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Ali H. NumanNoch keine Bewertungen
- Sensor Less Control of IM - With or Without Signal InjectionDokument24 SeitenSensor Less Control of IM - With or Without Signal Injectionsajs201Noch keine Bewertungen
- Digital Simulation of Field Oriented Control Using ANSIM Program, 1996.Dokument4 SeitenDigital Simulation of Field Oriented Control Using ANSIM Program, 1996.Ali H. NumanNoch keine Bewertungen
- Sensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Dokument135 SeitenSensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNoch keine Bewertungen
- Digital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Dokument7 SeitenDigital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Ali H. NumanNoch keine Bewertungen
- Efficient Parallel Control Scheme of Single Phase Inverters, 2007.Dokument5 SeitenEfficient Parallel Control Scheme of Single Phase Inverters, 2007.Ali H. NumanNoch keine Bewertungen
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Dokument7 SeitenDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNoch keine Bewertungen
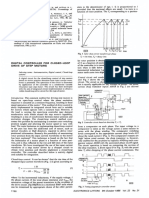
- Digital Controller For Closed-Loop Drive of Step Motors, 1986.Dokument2 SeitenDigital Controller For Closed-Loop Drive of Step Motors, 1986.Ali H. NumanNoch keine Bewertungen
- DC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenDokument19 SeitenDC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenAli H. NumanNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 1996-2001 Fuso - Electrical-SM - 26Dokument254 Seiten1996-2001 Fuso - Electrical-SM - 26Poon Electronic Training CentreNoch keine Bewertungen
- Hargreaves, 12 (3 Year)Dokument228 SeitenHargreaves, 12 (3 Year)Maycon Maran0% (1)
- Thermal Analysis and Design Optimization of Electric Machines Using Motor-CADDokument18 SeitenThermal Analysis and Design Optimization of Electric Machines Using Motor-CADkhodabandelouNoch keine Bewertungen
- Paper PowerGenEurope-GeneratorLTE Walsum PDFDokument19 SeitenPaper PowerGenEurope-GeneratorLTE Walsum PDFMochamad SolehNoch keine Bewertungen
- Contents:: Introduction Construction Working Principle Comparison of Rotor ReferencesDokument10 SeitenContents:: Introduction Construction Working Principle Comparison of Rotor Referenceskarthikeyan249100% (1)
- Motor Thermal Model Hot Cold Motor CurvesDokument15 SeitenMotor Thermal Model Hot Cold Motor Curvesdinakaran2020100% (2)
- Synchronous Generators 1Dokument50 SeitenSynchronous Generators 1api-264713836Noch keine Bewertungen
- IOE Instrumentation Lab ManualDokument14 SeitenIOE Instrumentation Lab ManualDivya KarkiNoch keine Bewertungen
- Super Efficient motors-IEEE PaperDokument6 SeitenSuper Efficient motors-IEEE Paperarunw110Noch keine Bewertungen
- L36 - DC Machines PDFDokument161 SeitenL36 - DC Machines PDFKshitijNoch keine Bewertungen
- Thermo Sorvall T3 Centrifuge - Service ManualDokument44 SeitenThermo Sorvall T3 Centrifuge - Service Manualluroguita100% (1)
- EF-35 - Service ManualDokument53 SeitenEF-35 - Service ManualsudalfaNoch keine Bewertungen
- DC Machines Fundamentals and CharacteristicsDokument64 SeitenDC Machines Fundamentals and Characteristicsluiz pauloNoch keine Bewertungen
- HB Stepper Motor EDokument22 SeitenHB Stepper Motor EEthan ColeNoch keine Bewertungen
- Industrial AutomationDokument4 SeitenIndustrial AutomationYogesh ChaudhariNoch keine Bewertungen
- Electric Motor Winding Project ReportDokument14 SeitenElectric Motor Winding Project Reportajaybm1Noch keine Bewertungen
- Gearless Mill Drive ManualDokument87 SeitenGearless Mill Drive ManualRonaldo LamarhNoch keine Bewertungen
- Introduction To SimulinkDokument123 SeitenIntroduction To SimulinkCristhianCoyoNoch keine Bewertungen
- Openwell Lubi Pump SetsDokument4 SeitenOpenwell Lubi Pump SetsNandini MudigondaNoch keine Bewertungen
- Muammer YILDIZ - MagnamotorDokument43 SeitenMuammer YILDIZ - MagnamotorCaesar PB100% (1)
- 18EE55Dokument6 Seiten18EE551MV20EE017 Chaithra kmNoch keine Bewertungen
- Concept of Sinusoidal Distributed Windings: Appendix ADokument9 SeitenConcept of Sinusoidal Distributed Windings: Appendix ASarvasaisrinathNoch keine Bewertungen
- 4 - Engine Instruments - OcrDokument189 Seiten4 - Engine Instruments - OcrtmhoangvnaNoch keine Bewertungen
- Ch-4 DC Machinces StudentsDokument104 SeitenCh-4 DC Machinces Studentsyohannes tesfahaunNoch keine Bewertungen
- Synchronous Machines and SCDokument6 SeitenSynchronous Machines and SCivancho04mNoch keine Bewertungen
- Motor Rotor Teco DatosDokument4 SeitenMotor Rotor Teco DatoscenicercNoch keine Bewertungen
- R16 I B. Tech II Semester Supplementary Examinations, April/May - 2018 ELECTRICAL AND MECHANICAL TECHNOLOGYDokument8 SeitenR16 I B. Tech II Semester Supplementary Examinations, April/May - 2018 ELECTRICAL AND MECHANICAL TECHNOLOGYMohammed AliNoch keine Bewertungen
- Gen Write-Up 200MWDokument49 SeitenGen Write-Up 200MWanon_862746578Noch keine Bewertungen
- Industrial Diesel Generator Set: Standby Power RatingDokument7 SeitenIndustrial Diesel Generator Set: Standby Power RatingJavier SilvaNoch keine Bewertungen