Das könnte Ihnen auch gefallen
- Hydraulic Rock Drill HL 800 T Lifting Instructions: Incorrect CorrectDokument88 SeitenHydraulic Rock Drill HL 800 T Lifting Instructions: Incorrect Correctcristian100% (2)
- AC MotorsDokument52 SeitenAC Motorsjennybunnyomg50% (6)
- MerventoEsite1 2012Dokument12 SeitenMerventoEsite1 2012Bijar HoudaNoch keine Bewertungen
- FMC Pump Pump Engineering DatabookDokument84 SeitenFMC Pump Pump Engineering DatabookAlda England100% (3)
- 13-3/8 Standard Hydraulic Power Casing Tong: Eckel Manufacturing Co. IncDokument64 Seiten13-3/8 Standard Hydraulic Power Casing Tong: Eckel Manufacturing Co. IncJohn Jairo Simanca Castillo100% (1)
- MC Gregor Crane and 501-MOB-boat-davit - CARGOTEC - Manual SP2423-1-15 UMDokument193 SeitenMC Gregor Crane and 501-MOB-boat-davit - CARGOTEC - Manual SP2423-1-15 UMHristo67% (3)
- Downhole Mud Motors - Directional Drilling ClubDokument15 SeitenDownhole Mud Motors - Directional Drilling ClubJames KaranjaNoch keine Bewertungen
- Pplant Lec 2Dokument6 SeitenPplant Lec 2Alyssa SisonNoch keine Bewertungen
- Vane Motor PresentationDokument16 SeitenVane Motor PresentationJayesh BholeNoch keine Bewertungen
- 5 2020 10 06!03 05 20 AmDokument10 Seiten5 2020 10 06!03 05 20 AmHakim ChelghamNoch keine Bewertungen
- Torque ConverterDokument6 SeitenTorque ConverterMohan Preeth100% (1)
- Electromechanical ActuatorsDokument4 SeitenElectromechanical ActuatorsMohammed Asif NNoch keine Bewertungen
- Braking Ideas For Wind Turbines: Date: 23/07/2010 ALTRA104 Page 1 / 5Dokument5 SeitenBraking Ideas For Wind Turbines: Date: 23/07/2010 ALTRA104 Page 1 / 5vijayasarathy2013Noch keine Bewertungen
- Turbo ChargerDokument23 SeitenTurbo Chargerselvaraj9223100% (1)
- Pocket Guide Air Motors: Omsl - 9067 - 01.indd 1Dokument28 SeitenPocket Guide Air Motors: Omsl - 9067 - 01.indd 1zranothmanNoch keine Bewertungen
- Lecture 10 NptelDokument9 SeitenLecture 10 Nptelmailsk123Noch keine Bewertungen
- Turbo Tech 102 PDFDokument7 SeitenTurbo Tech 102 PDFPetar PavićNoch keine Bewertungen
- ME308 Machine Elements II, G.Özgen 5.1Dokument17 SeitenME308 Machine Elements II, G.Özgen 5.1Ege GökayNoch keine Bewertungen
- 2.5 TMME 3104 Lecture 4Dokument10 Seiten2.5 TMME 3104 Lecture 4KALEMA BEMME2025Noch keine Bewertungen
- Wind Energy Conversion SystemDokument84 SeitenWind Energy Conversion SystemcharlesNoch keine Bewertungen
- Learning Objectives: Hydraulic MotorsDokument18 SeitenLearning Objectives: Hydraulic MotorsMatovu PaulNoch keine Bewertungen
- MCE416 Moodle 5 Hydraulic MotorDokument20 SeitenMCE416 Moodle 5 Hydraulic MotorPaul KonduNoch keine Bewertungen
- Learning Objectives: Hydraulic MotorsDokument9 SeitenLearning Objectives: Hydraulic MotorsdeepaksagarNoch keine Bewertungen
- Motors and DrivesDokument27 SeitenMotors and DrivessifuszNoch keine Bewertungen
- Air-Start SystemDokument3 SeitenAir-Start Systemphutd09Noch keine Bewertungen
- Induction MotorDokument7 SeitenInduction MotorMiss TerryNoch keine Bewertungen
- AN Ngineering: Turning Gear and Component Selection GuidelinesDokument2 SeitenAN Ngineering: Turning Gear and Component Selection GuidelinesJose Lorenzo ToralNoch keine Bewertungen
- 2 Descripción Motores ReciprocosDokument53 Seiten2 Descripción Motores ReciprocosAngel Julian HernandezNoch keine Bewertungen
- Types of Air Motors Vane and RadialDokument3 SeitenTypes of Air Motors Vane and Radial10rodriguezNoch keine Bewertungen
- Lecture 3Dokument33 SeitenLecture 3Heleana Faye BundocNoch keine Bewertungen
- CCL ProjectDokument20 SeitenCCL ProjectDileep Kumar Manjhi100% (1)
- AkooDokument14 SeitenAkooHASHIMU BWETENoch keine Bewertungen
- Buscar TurboDokument37 SeitenBuscar TurboSarah Saida Villanueva GuevaraNoch keine Bewertungen
- RR TURBOMECHA CompressorDokument11 SeitenRR TURBOMECHA CompressorKing GamingNoch keine Bewertungen
- PandaDokument12 SeitenPandaSaroj KumarNoch keine Bewertungen
- VGT Turbochargers 9-05 PDFDokument15 SeitenVGT Turbochargers 9-05 PDFKifayat Ullah100% (4)
- Main Components of A Wind TurbineDokument8 SeitenMain Components of A Wind Turbinetejap314Noch keine Bewertungen
- SuperchargerDokument20 SeitenSuperchargerAnand KumarNoch keine Bewertungen
- Energy Savers: Variable Speed Drives (VSD)Dokument4 SeitenEnergy Savers: Variable Speed Drives (VSD)sayed2846Noch keine Bewertungen
- Types of Ac GeneratorDokument10 SeitenTypes of Ac GeneratorJherel BerinNoch keine Bewertungen
- 17ME655-Module 4 PDFDokument40 Seiten17ME655-Module 4 PDFVinayakNoch keine Bewertungen
- Otary Ctuators: Sudhir 100926005 M.Tech Manufacturing TechnologyDokument34 SeitenOtary Ctuators: Sudhir 100926005 M.Tech Manufacturing TechnologySudhir BhatNoch keine Bewertungen
- AC Induction Motors vs. Permanent Magnet Synchronous MotorsDokument5 SeitenAC Induction Motors vs. Permanent Magnet Synchronous MotorsAhmed GhreebNoch keine Bewertungen
- (73131576) Traduccion Unidad 2 Libro CompreDokument39 Seiten(73131576) Traduccion Unidad 2 Libro CompreArchi Ux100% (1)
- CHE10209 Couplings Seals BearingsDokument36 SeitenCHE10209 Couplings Seals BearingsFA AyNoch keine Bewertungen
- UNIT-3 W P: IND OwerDokument44 SeitenUNIT-3 W P: IND OwerPankaj RupaniNoch keine Bewertungen
- Screw CompressorDokument2 SeitenScrew CompressorRiti AdhikariNoch keine Bewertungen
- Training Manual On Motor MaintenanceDokument107 SeitenTraining Manual On Motor MaintenancePhanindra Kumar J100% (1)
- Wind&Solar 1Dokument72 SeitenWind&Solar 12023ree1029Noch keine Bewertungen
- Engineering Letter: IntegralmotorsforcentrifugalfansDokument4 SeitenEngineering Letter: IntegralmotorsforcentrifugalfansjameeloNoch keine Bewertungen
- Propulsion LabDokument39 SeitenPropulsion LabKalpit KauraseNoch keine Bewertungen
- Himanshu Singh Turbocharger-SeminarDokument20 SeitenHimanshu Singh Turbocharger-SeminarHimanshu SinghNoch keine Bewertungen
- Fluid Coupling &torque ConverterDokument5 SeitenFluid Coupling &torque ConverterArsh Gautam UD100% (1)
- Assignment3: Name: Levitaran A/L Sager MATRICS: A0000623 Lecturer: Sir. Azni Bin MonDokument15 SeitenAssignment3: Name: Levitaran A/L Sager MATRICS: A0000623 Lecturer: Sir. Azni Bin MonlevitranNoch keine Bewertungen
- Group 7 Hydraulic MotorDokument40 SeitenGroup 7 Hydraulic MotorKapil KaviNoch keine Bewertungen
- Torque of ThreePhase Induction Motor ExplainedDokument2 SeitenTorque of ThreePhase Induction Motor Explainedsaga2000cnNoch keine Bewertungen
- Presented By: Rajesh M S (4mc04au013)Dokument18 SeitenPresented By: Rajesh M S (4mc04au013)Vinod SubramaniamNoch keine Bewertungen
- Seminar On Supercharger: BY Manhar 15AE60R18Dokument19 SeitenSeminar On Supercharger: BY Manhar 15AE60R18Hatinderpal SinghNoch keine Bewertungen
- Diesel Power PlantDokument37 SeitenDiesel Power PlantAndrewNoch keine Bewertungen
- Energy Answers For MotorsDokument4 SeitenEnergy Answers For Motorsdetroit44Noch keine Bewertungen
- Construction and Manufacture of AutomobilesVon EverandConstruction and Manufacture of AutomobilesBewertung: 5 von 5 Sternen5/5 (1)
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsVon EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsNoch keine Bewertungen
- What Is Alternating CurrentDokument49 SeitenWhat Is Alternating CurrentRajeev ValunjkarNoch keine Bewertungen
- What Are The Speed Control Method of Induction MotorsDokument12 SeitenWhat Are The Speed Control Method of Induction MotorsRajeev ValunjkarNoch keine Bewertungen
- Buddha Philosophy and Western PsychologyDokument16 SeitenBuddha Philosophy and Western PsychologyRajeev ValunjkarNoch keine Bewertungen
- MEO Orals On Marine Electro Technology Function 5Dokument19 SeitenMEO Orals On Marine Electro Technology Function 5Rajeev ValunjkarNoch keine Bewertungen
- The World Is Infinitely ComplexDokument10 SeitenThe World Is Infinitely ComplexRajeev ValunjkarNoch keine Bewertungen
- Feeder ProtectionDokument2 SeitenFeeder ProtectionRajeev ValunjkarNoch keine Bewertungen
- 10 Seires Resonance PDFDokument19 Seiten10 Seires Resonance PDFRajeev ValunjkarNoch keine Bewertungen
- Safe Working Practices: Tips and Tools For Creating and Presenting Wide Format SlidesDokument53 SeitenSafe Working Practices: Tips and Tools For Creating and Presenting Wide Format SlidesRajeev ValunjkarNoch keine Bewertungen
- Marine High Voltage SystemsDokument27 SeitenMarine High Voltage SystemsRajeev Valunjkar100% (4)
- Main Switch Board (MSB) Safeties, Protection and MaintenanceDokument9 SeitenMain Switch Board (MSB) Safeties, Protection and MaintenanceRajeev ValunjkarNoch keine Bewertungen
- Basic Temperature Control SystemDokument26 SeitenBasic Temperature Control SystemRajeev ValunjkarNoch keine Bewertungen
- Elec9713-11 Tutorial 3 PDFDokument2 SeitenElec9713-11 Tutorial 3 PDFRajeev ValunjkarNoch keine Bewertungen
- L1 PDFDokument26 SeitenL1 PDFRajeev ValunjkarNoch keine Bewertungen
- Schizoid Personality DisorderDokument4 SeitenSchizoid Personality DisorderRajeev ValunjkarNoch keine Bewertungen
- EE6504-Electrical Machines - II-306544629-Em II Unit 4Dokument20 SeitenEE6504-Electrical Machines - II-306544629-Em II Unit 4Rajeev ValunjkarNoch keine Bewertungen
- Relay Protection Setting For Preparing ReportDokument12 SeitenRelay Protection Setting For Preparing ReportRajeev ValunjkarNoch keine Bewertungen
- Chapter 3: ThyristorsDokument50 SeitenChapter 3: ThyristorsRajeev ValunjkarNoch keine Bewertungen
- Sr. No. Date Day Time Faculty Name: Online Lecture ScheduleDokument2 SeitenSr. No. Date Day Time Faculty Name: Online Lecture ScheduleRajeev ValunjkarNoch keine Bewertungen
- R. Valunjkar (Total Load: 209+120 Part-A 329) : (Old 63hrs. & New 63hrs.) 126 Hrs in 4 MonthsDokument8 SeitenR. Valunjkar (Total Load: 209+120 Part-A 329) : (Old 63hrs. & New 63hrs.) 126 Hrs in 4 MonthsRajeev ValunjkarNoch keine Bewertungen
- Relay 66 49 Protection SettingDokument5 SeitenRelay 66 49 Protection SettingRajeev ValunjkarNoch keine Bewertungen
- Acker SOIL-SCOUT: All-Hydraulic, Com Pact Drill RigDokument2 SeitenAcker SOIL-SCOUT: All-Hydraulic, Com Pact Drill RigEmmanuel BNoch keine Bewertungen
- Actuation Systems For MechatronicsDokument26 SeitenActuation Systems For Mechatronicsabdulkerim seidNoch keine Bewertungen
- Motores VickersDokument29 SeitenMotores VickersHenry AvalosNoch keine Bewertungen
- Printhandler Ashx PDFDokument20 SeitenPrinthandler Ashx PDFShivraj WaghNoch keine Bewertungen
- Basics of Hydraulics and Hydraulic SystemsDokument7 SeitenBasics of Hydraulics and Hydraulic SystemsIbrahima DioufNoch keine Bewertungen
- MTS Submarine Equipment 2013-Rev1Dokument39 SeitenMTS Submarine Equipment 2013-Rev1pierremsNoch keine Bewertungen
- HMAP BR 201410-00 ZX470LC-5G Indonesia PDFDokument2 SeitenHMAP BR 201410-00 ZX470LC-5G Indonesia PDFIndra PurnamaNoch keine Bewertungen
- Perforadora Voladura TMB20Dokument4 SeitenPerforadora Voladura TMB20eleon07Noch keine Bewertungen
- High Torque Radial Piston Motors MR Type: Fixed Displacement (Up To 9000 CM /rev - 550 in /rev)Dokument56 SeitenHigh Torque Radial Piston Motors MR Type: Fixed Displacement (Up To 9000 CM /rev - 550 in /rev)Edwin Mamani DiazNoch keine Bewertungen
- Pesco Catalog 1960'sDokument34 SeitenPesco Catalog 1960'sgrcatu100% (1)
- Allterrain+Crane Sany Sac 2200Dokument16 SeitenAllterrain+Crane Sany Sac 2200Marcial SuarezNoch keine Bewertungen
- M S 1 1 - M S E 1 1: Hydraulic MotorsDokument36 SeitenM S 1 1 - M S E 1 1: Hydraulic MotorsmehmetNoch keine Bewertungen
- Especificación DX 700Dokument4 SeitenEspecificación DX 700Raul Apaza LujanNoch keine Bewertungen
- S.No. Components Makes: 1 Grab Cranes - Gantry TypeDokument4 SeitenS.No. Components Makes: 1 Grab Cranes - Gantry TypeHarish KumarNoch keine Bewertungen
- Standart Gear Drives ENGDokument178 SeitenStandart Gear Drives ENGCanan DönmezNoch keine Bewertungen
- LF230 TechData English Oct 2013 App ReadyDokument12 SeitenLF230 TechData English Oct 2013 App ReadyAhmed GhoneimNoch keine Bewertungen
- SerieAK-2020 GBDokument120 SeitenSerieAK-2020 GBAndré SilvaNoch keine Bewertungen
- LF230 Hydraulic Diamond Core DrillDokument2 SeitenLF230 Hydraulic Diamond Core DrillSergeyNoch keine Bewertungen
- More Care. Built In.: Volvo Compact ExcavatorDokument12 SeitenMore Care. Built In.: Volvo Compact ExcavatorOktavian Aluy100% (1)
- Robbins 44RH C Low ProfileDokument4 SeitenRobbins 44RH C Low ProfileSriram NambiNoch keine Bewertungen
- Winche Lantec Spec SheetDokument4 SeitenWinche Lantec Spec SheetisraelitajudaNoch keine Bewertungen
- Osm-099 55000-150Dokument80 SeitenOsm-099 55000-150Taller cncNoch keine Bewertungen
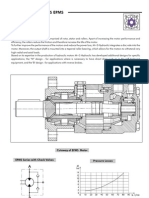
- Hydraulic Motors Epms: Cutaway of EPMS MotorDokument16 SeitenHydraulic Motors Epms: Cutaway of EPMS MotorDavíð Örn FriðrikssonNoch keine Bewertungen
- Motor Assy - Track DriveDokument3 SeitenMotor Assy - Track DriveDavid Apaza HurtadoNoch keine Bewertungen
- John Crane Power TransmissionDokument98 SeitenJohn Crane Power TransmissionJavier García100% (1)
- Motor Hidraulico Olbitrol EatonDokument36 SeitenMotor Hidraulico Olbitrol EatonJaime JimenezNoch keine Bewertungen