Das könnte Ihnen auch gefallen
- Exercices d'optique et d'électromagnétismeVon EverandExercices d'optique et d'électromagnétismeBewertung: 5 von 5 Sternen5/5 (1)
- Commande DTC Cinq Niveaux À 24 Secteurs D'un Moteur Asynchrone Par Méthodes IntelligentesDokument9 SeitenCommande DTC Cinq Niveaux À 24 Secteurs D'un Moteur Asynchrone Par Méthodes IntelligentesbenbouhenniNoch keine Bewertungen
- LET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2Dokument27 SeitenLET61 - Commande Des Machines Electriques - Chapitres 1 Et 2 TD1 Et 2adnanNoch keine Bewertungen
- Commande Vectorielle de La Machine AsynchroneDokument7 SeitenCommande Vectorielle de La Machine AsynchroneSalmi Nour E'ddineNoch keine Bewertungen
- TP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeDokument2 SeitenTP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeSarra SdiriNoch keine Bewertungen
- TP n03 Moteur A Courant Continu Elm s5!20!21 1Dokument3 SeitenTP n03 Moteur A Courant Continu Elm s5!20!21 1Ondjy Manchiny ValmirNoch keine Bewertungen
- Cours Regimes TransitoiresDokument9 SeitenCours Regimes TransitoiresvyasnaikoNoch keine Bewertungen
- Entrainement À Vitesse Variable III - 2010 - 2011Dokument54 SeitenEntrainement À Vitesse Variable III - 2010 - 2011chriaiNoch keine Bewertungen
- TP THTDokument4 SeitenTP THTYahia NinoNoch keine Bewertungen
- UTBM Convertisseurs-De-puissance 2007 GESCDokument2 SeitenUTBM Convertisseurs-De-puissance 2007 GESCBillal BillalNoch keine Bewertungen
- Cours-Master 2 Energie Electrique Commande Des Machines ElectriquesDokument158 SeitenCours-Master 2 Energie Electrique Commande Des Machines ElectriquesRnav rnavNoch keine Bewertungen
- Onduleur A MLIDokument50 SeitenOnduleur A MLIAbdesslam GuennouniNoch keine Bewertungen
- Entrainement ElectriqueDokument29 SeitenEntrainement ElectriqueKachi AbdessalamNoch keine Bewertungen
- Chapitre 1 - Etude Des Systèmes ÉlectriquesDokument46 SeitenChapitre 1 - Etude Des Systèmes Électriquesأشرف عبودNoch keine Bewertungen
- TDs Electronique de Puissance AvancéeDokument18 SeitenTDs Electronique de Puissance Avancéeبكر بكرNoch keine Bewertungen
- TP3 Identification de MCCDokument5 SeitenTP3 Identification de MCCBounegab YoucefNoch keine Bewertungen
- TP Réseaux Électriques L3Dokument57 SeitenTP Réseaux Électriques L3Nesrine BaatchiaNoch keine Bewertungen
- TD1 Met303Dokument2 SeitenTD1 Met303Luka MadridNoch keine Bewertungen
- Chapitre 1 - ELN - PUISS - AVNCDokument13 SeitenChapitre 1 - ELN - PUISS - AVNCMessaoud Djamal Laidi100% (1)
- TP Réseau 33Dokument17 SeitenTP Réseau 33Bouaiss AymenNoch keine Bewertungen
- Copie de E.M.D. de Protection Des Systèmes Énergétiques LICENCE Septembre 2020Dokument2 SeitenCopie de E.M.D. de Protection Des Systèmes Énergétiques LICENCE Septembre 2020Manino Rafik100% (1)
- Machine À Courant Continu II PDFDokument35 SeitenMachine À Courant Continu II PDFhafid0% (1)
- Examen 2015 L3 FinalDokument2 SeitenExamen 2015 L3 FinaljobNoch keine Bewertungen
- FSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASDokument8 SeitenFSTM - FI - GET3 - S5 - TP3 - Commande Scalaire - MASabdessamad taoualNoch keine Bewertungen
- TP Moteur Monophasé EEA1Dokument7 SeitenTP Moteur Monophasé EEA1akramNoch keine Bewertungen
- Cours TransfoDokument158 SeitenCours TransfoOthman TaalibiNoch keine Bewertungen
- Examen Variation de Vitesse - 2022Dokument12 SeitenExamen Variation de Vitesse - 2022MOURAD EL MENDILINoch keine Bewertungen
- LET61 - Commande Des Machines Electriques - TD3Dokument1 SeiteLET61 - Commande Des Machines Electriques - TD3adnanNoch keine Bewertungen
- Mande de MAS-1Dokument8 SeitenMande de MAS-1Hakim Madrid100% (1)
- Cours Modelisation Du Reseau ElectriqueDokument34 SeitenCours Modelisation Du Reseau ElectriqueChristo Rouyn100% (1)
- TP 1 Commande MachinesDokument6 SeitenTP 1 Commande MachinesislambenhamidaNoch keine Bewertungen
- TP #01 Electronique de Puissance Avancée 1. Le But Du TPDokument3 SeitenTP #01 Electronique de Puissance Avancée 1. Le But Du TPabed elkader Laamri100% (1)
- Chap1 Association Mcc-Convertisseurs Drid2020Dokument16 SeitenChap1 Association Mcc-Convertisseurs Drid2020Mohamed BouNoch keine Bewertungen
- 1734 PDFDokument6 Seiten1734 PDFMoussaPouyeNoch keine Bewertungen
- CHAPITER2 RedressementDokument36 SeitenCHAPITER2 RedressementdjebienNoch keine Bewertungen
- Hacheur 4quadrantsDokument8 SeitenHacheur 4quadrantsJason CarrNoch keine Bewertungen
- TP Modelisation de La Machine Asynchrone A CageDokument9 SeitenTP Modelisation de La Machine Asynchrone A CageOuuji SamaNoch keine Bewertungen
- TP Commande D'une Machine À Courant Continu1Dokument9 SeitenTP Commande D'une Machine À Courant Continu1OkbaNoch keine Bewertungen
- Simulation Des Machines À Courant Continu Dans L PDFDokument10 SeitenSimulation Des Machines À Courant Continu Dans L PDFKa AissaNoch keine Bewertungen
- Modelisation Et Commande de La Machine Asynchrone: J.P Caron, J.P HautierDokument4 SeitenModelisation Et Commande de La Machine Asynchrone: J.P Caron, J.P HautierTarak Benslimane0% (1)
- Chapitre3 Technique de La Commande ÉlectriqueDokument11 SeitenChapitre3 Technique de La Commande Électriqueاشر اقNoch keine Bewertungen
- Chapitre I Entra Nements Electriques A Vitesse Variable-1Dokument8 SeitenChapitre I Entra Nements Electriques A Vitesse Variable-1Mahmoud SettouNoch keine Bewertungen
- WweeDokument2 SeitenWweeHicham BaghdadiNoch keine Bewertungen
- Protection A Maximum de CourantDokument3 SeitenProtection A Maximum de CourantAbdelmalik B197Noch keine Bewertungen
- Moteur SynchroneDokument11 SeitenMoteur SynchroneAhmed MidoNoch keine Bewertungen
- Serie de TD 1 Commande de MCCDokument1 SeiteSerie de TD 1 Commande de MCCZaki ZakariaNoch keine Bewertungen
- Ett0301 - TPDokument45 SeitenEtt0301 - TPMohamed Amine100% (1)
- Les Preactionneurs ElectriquesDokument5 SeitenLes Preactionneurs ElectriquesDjamal Zenaidi100% (1)
- Puissance DeformanteDokument17 SeitenPuissance DeformantetliarNoch keine Bewertungen
- GE-Hakim Ait Said-Electrotechnique industrielle-TP - EI - M1 - ELT-S1-S2Dokument6 SeitenGE-Hakim Ait Said-Electrotechnique industrielle-TP - EI - M1 - ELT-S1-S2Rabah AmidiNoch keine Bewertungen
- Chapitre 2 Transformateur Triphasé - Partie1Dokument14 SeitenChapitre 2 Transformateur Triphasé - Partie1Imen SaidiNoch keine Bewertungen
- TP HacheurDokument3 SeitenTP Hacheursoufin elganiNoch keine Bewertungen
- Fiche TD CommandeDokument2 SeitenFiche TD CommandeHassan AbushwarebNoch keine Bewertungen
- Soutenance - Thèse Dando - Bon - 07 - 01 - 2017Dokument59 SeitenSoutenance - Thèse Dando - Bon - 07 - 01 - 2017Yeng PingNoch keine Bewertungen
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabVon EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabNoch keine Bewertungen
- L'Électricité - Découvreurs et Inventeurs: Tome IVVon EverandL'Électricité - Découvreurs et Inventeurs: Tome IVBewertung: 3 von 5 Sternen3/5 (2)
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesVon EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesNoch keine Bewertungen
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVVon EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVNoch keine Bewertungen
- Le Fuselage D'un Avion de Transport PDFDokument14 SeitenLe Fuselage D'un Avion de Transport PDFJean-Verseau RafilsNoch keine Bewertungen
- Fiche - Technique - CS3 CC2 PDFDokument2 SeitenFiche - Technique - CS3 CC2 PDFmezouedNoch keine Bewertungen
- YZF-R1: Manuel D'AtelierDokument418 SeitenYZF-R1: Manuel D'AtelierBuchotNoch keine Bewertungen
- 2eme Route TajhizDokument46 Seiten2eme Route TajhizjecakaNoch keine Bewertungen
- Engine Number Guide French4 PDFDokument2 SeitenEngine Number Guide French4 PDFted detarNoch keine Bewertungen
- Volvo FMX HassenDokument2 SeitenVolvo FMX HassenDerbel YassineNoch keine Bewertungen
- Acoustique Des VéhiculesDokument4 SeitenAcoustique Des Véhiculeslifefoot6Noch keine Bewertungen
- Samo CVDokument2 SeitenSamo CVmaninovedavilusNoch keine Bewertungen
- CFAO Motors - Carte Identite Juillet 2021Dokument12 SeitenCFAO Motors - Carte Identite Juillet 2021doudou GUEYENoch keine Bewertungen
- Huile de Boite 6012ADokument10 SeitenHuile de Boite 6012ANiubiNoch keine Bewertungen
- Reacteur ExposeDokument11 SeitenReacteur Exposecélia fer100% (2)
- Manual de Usuario Fantic Motard 125Dokument130 SeitenManual de Usuario Fantic Motard 125Lapo BorriNoch keine Bewertungen
- Fiche Technique TRAPELEC BTPDokument14 SeitenFiche Technique TRAPELEC BTPMent's IadaNoch keine Bewertungen
- (PFS) (TD) Eolienne 4Dokument4 Seiten(PFS) (TD) Eolienne 4El Maimouni kenzaNoch keine Bewertungen
- ds1 m32f05 Fa Oct 2021Dokument5 Seitends1 m32f05 Fa Oct 2021Lh LhNoch keine Bewertungen
- Instrucciones PVL BidalotDokument4 SeitenInstrucciones PVL Bidalotarnau mendozaNoch keine Bewertungen
- Vente Du Samedi 29 Avril 2023 À 9:00: Vente Aux Encheres PubliquesDokument22 SeitenVente Du Samedi 29 Avril 2023 À 9:00: Vente Aux Encheres PubliquesJonathan GassonNoch keine Bewertungen
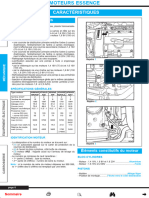
- Caractéristiques: GénéralitésDokument28 SeitenCaractéristiques: GénéralitésmawoussiborisNoch keine Bewertungen
- Rapport de SFE Ocp PhosbocraaDokument49 SeitenRapport de SFE Ocp PhosbocraaHamza Kaaibiche100% (4)
- Presse Compréh Art La MotoneigeDokument5 SeitenPresse Compréh Art La MotoneigeGabriel VanhouteNoch keine Bewertungen
- Résumé Moteur Asynchrone Avec ExercicesDokument5 SeitenRésumé Moteur Asynchrone Avec ExercicesjamesNoch keine Bewertungen
- Amdec PompesDokument38 SeitenAmdec PompesDhia Boubakri71% (7)
- Revue Technique Bandit 650Dokument226 SeitenRevue Technique Bandit 650Killian ElaidousNoch keine Bewertungen
- Flexident Senior AnglickyDokument2 SeitenFlexident Senior AnglickySaadEddine AtifNoch keine Bewertungen
- Chapitre 2Dokument18 SeitenChapitre 2riad chouiterNoch keine Bewertungen
- Deadlands Reloaded - 3 - Les Derniers FilsDokument306 SeitenDeadlands Reloaded - 3 - Les Derniers FilsJulien BARBIER100% (1)
- Hyster Ut-Ut6 Service Manual (01-2023) - 2Dokument10 SeitenHyster Ut-Ut6 Service Manual (01-2023) - 2Arouna M. KABORENoch keine Bewertungen
- J110K FR 50 inDokument5 SeitenJ110K FR 50 inRawand HmaiedNoch keine Bewertungen
- Evaluation Roulement AjustementDokument1 SeiteEvaluation Roulement AjustementElla Kabongo100% (2)
- Station de Pompage PDFDokument74 SeitenStation de Pompage PDFOusmane GueyeNoch keine Bewertungen