Das könnte Ihnen auch gefallen
- Ieee Base PaperDokument8 SeitenIeee Base PaperraniNoch keine Bewertungen
- Pedestrian Detection: Please, suggest a subtitle for a book with title 'Pedestrian Detection' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.Von EverandPedestrian Detection: Please, suggest a subtitle for a book with title 'Pedestrian Detection' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.Noch keine Bewertungen
- Dynamic Bayesian Networks For Vehicle CL PDFDokument9 SeitenDynamic Bayesian Networks For Vehicle CL PDFJoyce Arlem LameiraNoch keine Bewertungen
- Vehicle Detection 1Dokument15 SeitenVehicle Detection 1vinasingh6200Noch keine Bewertungen
- Vehicle Detection and Classification in Aerial Images Using Convolutional Neural NetworksDokument8 SeitenVehicle Detection and Classification in Aerial Images Using Convolutional Neural NetworksMinh Đinh NhậtNoch keine Bewertungen
- Paper VehiclesDokument7 SeitenPaper VehiclesShashankNoch keine Bewertungen
- Intelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural NetworksDokument14 SeitenIntelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural Networksahammedijas2209118Noch keine Bewertungen
- Vehicle Position Estimation With Aerial Imagery FromDokument8 SeitenVehicle Position Estimation With Aerial Imagery FromgurkanbasogluuNoch keine Bewertungen
- Drones 07 00117 v2Dokument18 SeitenDrones 07 00117 v2anony17cb08Noch keine Bewertungen
- Song2019 Article Vision-basedVehicleDetectionAnDokument16 SeitenSong2019 Article Vision-basedVehicleDetectionAnCos ConsultancyNoch keine Bewertungen
- Car Detection From Low-Altitude UAV Imagery WithDokument11 SeitenCar Detection From Low-Altitude UAV Imagery WithSarahNoch keine Bewertungen
- Minorpaper PDFDokument19 SeitenMinorpaper PDFKartikNoch keine Bewertungen
- An Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemDokument23 SeitenAn Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemRaja ChandruNoch keine Bewertungen
- Vehicle Detection and Tracking For Traffic ManagementDokument8 SeitenVehicle Detection and Tracking For Traffic ManagementIAES IJAINoch keine Bewertungen
- Pretrained Vehicle ClassifierDokument11 SeitenPretrained Vehicle ClassifierSuvramalya BasakNoch keine Bewertungen
- Object Detection and Tracking Algorithms For Vehicle Counting: A Comparative AnalysisDokument11 SeitenObject Detection and Tracking Algorithms For Vehicle Counting: A Comparative Analysisnaresh tinnaluriNoch keine Bewertungen
- Attention-Based Highway Safety Planner For Autonomous Driving Via Deep Reinforcement LearningDokument14 SeitenAttention-Based Highway Safety Planner For Autonomous Driving Via Deep Reinforcement Learningthanhtan_tvuNoch keine Bewertungen
- 3autonomous CarDokument11 Seiten3autonomous CarJaya KumarNoch keine Bewertungen
- Vision-Based Unmanned Aerial Vehicle Detection and Tracking For Sense and Avoid SystemsDokument6 SeitenVision-Based Unmanned Aerial Vehicle Detection and Tracking For Sense and Avoid SystemsKaran ShettyNoch keine Bewertungen
- Robust and Fast Detection of Moving VehiclesDokument9 SeitenRobust and Fast Detection of Moving VehiclesVeri VerdiansyahNoch keine Bewertungen
- Vehicle Detection Using Normalized Color and EdgeDokument5 SeitenVehicle Detection Using Normalized Color and EdgeSai Prasanna NarahariNoch keine Bewertungen
- Computer Vision Techniques For Traffic Flow ComputDokument11 SeitenComputer Vision Techniques For Traffic Flow Computharrouche riadhNoch keine Bewertungen
- Power Infrastructure Monitoring and DamageDokument7 SeitenPower Infrastructure Monitoring and DamagePunyashlok MahapatraNoch keine Bewertungen
- An Aircraft Detection Framework Based On ReinforceDokument19 SeitenAn Aircraft Detection Framework Based On ReinforceTheanmozhi SNoch keine Bewertungen
- Morphology Based Moving Vehicle DetectionDokument7 SeitenMorphology Based Moving Vehicle DetectionPranjali SawantNoch keine Bewertungen
- Sensors 23 03385Dokument20 SeitenSensors 23 03385eslam foudaNoch keine Bewertungen
- A Vision-Based Method For Improving The Safety of Self-DrivingDokument5 SeitenA Vision-Based Method For Improving The Safety of Self-DrivingtilahunNoch keine Bewertungen
- Ijet V4i3p31 PDFDokument5 SeitenIjet V4i3p31 PDFInternational Journal of Engineering and TechniquesNoch keine Bewertungen
- Deep Convolutional Neural Networks Architecture For An Efficient Emergency Vehicle Classification in Real-Time Traffic MonitoringDokument11 SeitenDeep Convolutional Neural Networks Architecture For An Efficient Emergency Vehicle Classification in Real-Time Traffic MonitoringIAES IJAINoch keine Bewertungen
- Image Processing Based Vehicle Detection and Tracking MethodDokument5 SeitenImage Processing Based Vehicle Detection and Tracking MethodPranjali SawantNoch keine Bewertungen
- A Video-Based Real-Time Adaptive Vehicle-Counting System For Urban RoadsDokument16 SeitenA Video-Based Real-Time Adaptive Vehicle-Counting System For Urban Roadsatdeen sNoch keine Bewertungen
- (Asce) CP 1943-5487 0001013Dokument10 Seiten(Asce) CP 1943-5487 0001013deepak sureshNoch keine Bewertungen
- Unsupervised Obstacle Detection in DriviDokument15 SeitenUnsupervised Obstacle Detection in DriviSiddhant SheteNoch keine Bewertungen
- The Highd Dataset: A Drone Dataset of Naturalistic VehicleTrajectories On German Highways For Validation of Highly Automated Driving SystemsDokument8 SeitenThe Highd Dataset: A Drone Dataset of Naturalistic VehicleTrajectories On German Highways For Validation of Highly Automated Driving Systems陈意成Noch keine Bewertungen
- Pedestrian Detection Based On Background Compensation With Block-Matching AlgorithmDokument5 SeitenPedestrian Detection Based On Background Compensation With Block-Matching AlgorithmSoulayma GazzehNoch keine Bewertungen
- 9 - Artigo A Predictive Controller For Autonomous Vehicle Path Tracking - RaffoDokument11 Seiten9 - Artigo A Predictive Controller For Autonomous Vehicle Path Tracking - RaffoRafael Monteiro SouzaNoch keine Bewertungen
- Ijdsai V02 01 27 34 24122024Dokument8 SeitenIjdsai V02 01 27 34 24122024editor.ijdsaiNoch keine Bewertungen
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDokument6 SeitenAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sNoch keine Bewertungen
- A Method of Recognition For Fake Plate VehiclesDokument8 SeitenA Method of Recognition For Fake Plate Vehiclesmonkeydluffy161280Noch keine Bewertungen
- Conference Template A4 (1) 4Dokument5 SeitenConference Template A4 (1) 4Imad EL MallahiNoch keine Bewertungen
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDokument21 SeitenTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNoch keine Bewertungen
- 2021 IC E3sconf - Icmed2021 - 01099Dokument5 Seiten2021 IC E3sconf - Icmed2021 - 01099R.V.S.LALITHANoch keine Bewertungen
- Automatic Traffic Surveillance System For Vehicle Tracking and ClassificationDokument13 SeitenAutomatic Traffic Surveillance System For Vehicle Tracking and ClassificationSaleem AshrafNoch keine Bewertungen
- An Embedded Computer Vision SysytemDokument20 SeitenAn Embedded Computer Vision SysytemeviteNoch keine Bewertungen
- MULTIPLE - OBJECT - TRACKING - 01fe20bei046Dokument6 SeitenMULTIPLE - OBJECT - TRACKING - 01fe20bei046ramakrishnasj55Noch keine Bewertungen
- Blind-Spot Vehicle Detection Using Motion and Static FeatureDokument6 SeitenBlind-Spot Vehicle Detection Using Motion and Static FeatureDivine Grace BurmalNoch keine Bewertungen
- A Novel Model Based On AdaBoost and Deep CNN For Vehicle ClassificationDokument11 SeitenA Novel Model Based On AdaBoost and Deep CNN For Vehicle ClassificationANKUSH MISHRA 17110019Noch keine Bewertungen
- 2017 Ieee Tits KuangDokument10 Seiten2017 Ieee Tits KuangWafa BenzaouiNoch keine Bewertungen
- Research Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionDokument10 SeitenResearch Article: Real-Time Vehicle Detection Using Cross-Correlation and 2D-DWT For Feature ExtractionazedNoch keine Bewertungen
- (IJETA-V10I1P1) :M.Thachayani, G.RubavaniDokument3 Seiten(IJETA-V10I1P1) :M.Thachayani, G.RubavaniIJETA - EighthSenseGroupNoch keine Bewertungen
- (IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantDokument3 Seiten(IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantEighthSenseGroupNoch keine Bewertungen
- Vehicle Detection With Sub Class Training Using R CNN For The UA DETRAC BenchmarkDokument6 SeitenVehicle Detection With Sub Class Training Using R CNN For The UA DETRAC BenchmarkEvaristNoch keine Bewertungen
- Object Recognition in Aerial ImagesDokument9 SeitenObject Recognition in Aerial ImagesJunaid AkramNoch keine Bewertungen
- Lane Detection Algorithm Based On Temporal-SpatialDokument27 SeitenLane Detection Algorithm Based On Temporal-SpatialSabari Selvam BNoch keine Bewertungen
- National University of Defense Technology, Changsha, Hunan, 410073, ChinaDokument4 SeitenNational University of Defense Technology, Changsha, Hunan, 410073, ChinaAkshay KagwadeNoch keine Bewertungen
- Aircraft Recognition in Remote Sensing Images Based On Convolutional Neural NetworksDokument10 SeitenAircraft Recognition in Remote Sensing Images Based On Convolutional Neural NetworksTheanmozhi SNoch keine Bewertungen
- Li 2021Dokument19 SeitenLi 2021Keke LongNoch keine Bewertungen
- Comparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleDokument9 SeitenComparison Between Vertical Acceleration Data From Acquired Signals and Multibody Model For An Off-Road VehicleAnonymous ZC1ld1CLmNoch keine Bewertungen
- 2017 Eswa DraftDokument13 Seiten2017 Eswa DraftAbdulazizNoch keine Bewertungen
- Global Motion Assisted Low Complexity Video Encoding For UAV ApplicationsDokument12 SeitenGlobal Motion Assisted Low Complexity Video Encoding For UAV ApplicationsClear MindNoch keine Bewertungen
- Zhuang Miao, Shan Zou, Yang Li, Xiancai Zhang, Jiabao Wang, Ming HeDokument4 SeitenZhuang Miao, Shan Zou, Yang Li, Xiancai Zhang, Jiabao Wang, Ming HeClear MindNoch keine Bewertungen
- Drone Rangers: SustainabilityDokument2 SeitenDrone Rangers: SustainabilityClear MindNoch keine Bewertungen
- Research Article: Moving Object Detection Using Dynamic Motion Modelling From UAV Aerial ImagesDokument13 SeitenResearch Article: Moving Object Detection Using Dynamic Motion Modelling From UAV Aerial ImagesClear MindNoch keine Bewertungen
- (Approved) : Preparatory Tillage 1Dokument1 Seite(Approved) : Preparatory Tillage 1Clear MindNoch keine Bewertungen
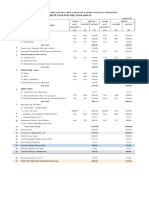
- In The Punjab For The Year 2018-19: Cost of Production of Irri (Paddy) Crop Estimate Under Average ConditionsDokument1 SeiteIn The Punjab For The Year 2018-19: Cost of Production of Irri (Paddy) Crop Estimate Under Average ConditionsClear MindNoch keine Bewertungen
- 2018-19 BasmatiDokument1 Seite2018-19 BasmatiClear MindNoch keine Bewertungen
- 6-Mapping Crop Type Using Hyperspectral and Multispectral DatasetsDokument35 Seiten6-Mapping Crop Type Using Hyperspectral and Multispectral DatasetsClear MindNoch keine Bewertungen
- Vegetables Growing Calendar in Pakistan - Multan FarmsDokument4 SeitenVegetables Growing Calendar in Pakistan - Multan FarmsClear Mind67% (3)
- A.meaning and Scope of Education FinalDokument22 SeitenA.meaning and Scope of Education FinalMelody CamcamNoch keine Bewertungen
- Simon Ardhi Yudanto UpdateDokument3 SeitenSimon Ardhi Yudanto UpdateojksunarmanNoch keine Bewertungen
- A Literature Review of Retailing Sector and BusineDokument21 SeitenA Literature Review of Retailing Sector and BusineSid MichaelNoch keine Bewertungen
- D25KS Sanvick PDFDokument4 SeitenD25KS Sanvick PDFJiménez Manuel100% (1)
- D&D 5.0 Combat Reference Sheet Move Action: Interact With One Object Do Other Simple ActivtiesDokument2 SeitenD&D 5.0 Combat Reference Sheet Move Action: Interact With One Object Do Other Simple ActivtiesJason ParsonsNoch keine Bewertungen
- MFE Module 1 .Dokument15 SeitenMFE Module 1 .Adarsh KNoch keine Bewertungen
- Session 1Dokument18 SeitenSession 1Akash GuptaNoch keine Bewertungen
- Toh736 - 84000 The Dharani of Parnasavari PDFDokument24 SeitenToh736 - 84000 The Dharani of Parnasavari PDFJames LeeNoch keine Bewertungen
- 11.3.1 Some Special CasesDokument10 Seiten11.3.1 Some Special CasesSiddharth KishanNoch keine Bewertungen
- Mission and VisionDokument5 SeitenMission and VisionsanjedNoch keine Bewertungen
- China Training WCDMA 06-06Dokument128 SeitenChina Training WCDMA 06-06ryanz2009Noch keine Bewertungen
- PDFDokument27 SeitenPDFER Saurabh KatariyaNoch keine Bewertungen
- OT Initial Assessment (OTIA) 2022-11-15Dokument2 SeitenOT Initial Assessment (OTIA) 2022-11-15funtikarNoch keine Bewertungen
- Federalist Papers 10 51 ExcerptsDokument2 SeitenFederalist Papers 10 51 Excerptsapi-292351355Noch keine Bewertungen
- Best Mutual Funds For 2023 & BeyondDokument17 SeitenBest Mutual Funds For 2023 & BeyondPrateekNoch keine Bewertungen
- The Checkmate Patterns Manual: The Ultimate Guide To Winning in ChessDokument30 SeitenThe Checkmate Patterns Manual: The Ultimate Guide To Winning in ChessDusen VanNoch keine Bewertungen
- PlateNo 1Dokument7 SeitenPlateNo 1Franz Anfernee Felipe GenerosoNoch keine Bewertungen
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationDokument6 SeitenHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiNoch keine Bewertungen
- Safety Bulletin 09 - Emergency Escape Breathing Device - Product RecallDokument2 SeitenSafety Bulletin 09 - Emergency Escape Breathing Device - Product RecallMuhammadNoch keine Bewertungen
- Claim of FactDokument11 SeitenClaim of FactXeb UlritzNoch keine Bewertungen
- Active Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023Dokument119 SeitenActive Hospital Network List For Vidal Health Insurance Tpa PVT LTD As On 01 Feb 2023jagdeepchkNoch keine Bewertungen
- AMICO Bar Grating CatalogDokument57 SeitenAMICO Bar Grating CatalogAdnanNoch keine Bewertungen
- Johnson & Johnson Equity Research ReportDokument13 SeitenJohnson & Johnson Equity Research ReportPraveen R V100% (3)
- Financial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyDokument3 SeitenFinancial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyAsh imoNoch keine Bewertungen
- 2500 Valve BrochureDokument12 Seiten2500 Valve BrochureJurie_sk3608Noch keine Bewertungen
- SubaruDokument7 SeitenSubaruclaude terizlaNoch keine Bewertungen
- Sample REVISION QUESTION BANK. ACCA Paper F5 PERFORMANCE MANAGEMENTDokument43 SeitenSample REVISION QUESTION BANK. ACCA Paper F5 PERFORMANCE MANAGEMENTAbayneh Assefa75% (4)
- DirectionDokument1 SeiteDirectionJessica BacaniNoch keine Bewertungen
- PETAL Sentence StartersDokument1 SeitePETAL Sentence StartersSnip x Hunt manNoch keine Bewertungen
- Kissoft 15,69,0.4Dokument10 SeitenKissoft 15,69,0.4Daggupati PraveenNoch keine Bewertungen
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureVon EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureBewertung: 4.5 von 5 Sternen4.5/5 (2)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsVon EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Von EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Bewertung: 4 von 5 Sternen4/5 (5)
- Digital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSVon EverandDigital Twin Development and Deployment on the Cloud: Developing Cloud-Friendly Dynamic Models Using Simulink®/SimscapeTM and Amazon AWSNoch keine Bewertungen
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Von EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Bewertung: 4 von 5 Sternen4/5 (3)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityVon EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityVon EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityBewertung: 3.5 von 5 Sternen3.5/5 (22)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsVon EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsBewertung: 5 von 5 Sternen5/5 (3)
- SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildVon EverandSAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We BuildBewertung: 5 von 5 Sternen5/5 (5)
- Building with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksVon EverandBuilding with Virtual LEGO: Getting Started with LEGO Digital Designer, LDraw, and MecabricksNoch keine Bewertungen
- Practical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Von EverandPractical Robotics in C++: Build and Program Real Autonomous Robots Using Raspberry Pi (English Edition)Noch keine Bewertungen
- The AI Generation: Shaping Our Global Future with Thinking MachinesVon EverandThe AI Generation: Shaping Our Global Future with Thinking MachinesBewertung: 4 von 5 Sternen4/5 (2)
- A Welder’s Handbook to Robotic ProgrammingVon EverandA Welder’s Handbook to Robotic ProgrammingBewertung: 5 von 5 Sternen5/5 (3)
- Artificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesVon EverandArtificial Intelligence: Machine Learning, Deep Learning, and Automation ProcessesBewertung: 5 von 5 Sternen5/5 (2)
- Artificial Intelligence: From Medieval Robots to Neural NetworksVon EverandArtificial Intelligence: From Medieval Robots to Neural NetworksBewertung: 4 von 5 Sternen4/5 (4)
- ChatGPT: The Future of Intelligent ConversationVon EverandChatGPT: The Future of Intelligent ConversationBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceVon EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceBewertung: 5 von 5 Sternen5/5 (9)
- Artificial You: AI and the Future of Your MindVon EverandArtificial You: AI and the Future of Your MindBewertung: 4 von 5 Sternen4/5 (3)
- Collection of Raspberry Pi ProjectsVon EverandCollection of Raspberry Pi ProjectsBewertung: 5 von 5 Sternen5/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessVon EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNoch keine Bewertungen
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesVon EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesBewertung: 2.5 von 5 Sternen2.5/5 (3)