Das könnte Ihnen auch gefallen
- Particulate Morphology: Mathematics Applied to Particle AssembliesVon EverandParticulate Morphology: Mathematics Applied to Particle AssembliesNoch keine Bewertungen
- Random ForestDokument5 SeitenRandom ForestramatsreeNoch keine Bewertungen
- Multivariate Density Estimation: Theory, Practice, and VisualizationVon EverandMultivariate Density Estimation: Theory, Practice, and VisualizationBewertung: 4 von 5 Sternen4/5 (1)
- Tandom ForestDokument6 SeitenTandom ForestSergio VelasquezNoch keine Bewertungen
- Adaptive XML Tree Classification On Evolving Data StreamsDokument16 SeitenAdaptive XML Tree Classification On Evolving Data StreamsKevin MondragonNoch keine Bewertungen
- Random ForestDokument5 SeitenRandom Forestniks53Noch keine Bewertungen
- Purdue University Research on Qualitative Behavior of Impurity-Based Splitting RulesDokument54 SeitenPurdue University Research on Qualitative Behavior of Impurity-Based Splitting RulesJorge Yupanqui DuranNoch keine Bewertungen
- CRCF BrainstormDokument20 SeitenCRCF BrainstormDavid BriggsNoch keine Bewertungen
- IJRS Vol23No22PP4971-4978TsolmonetalDokument8 SeitenIJRS Vol23No22PP4971-4978TsolmonetalNanda BkuNoch keine Bewertungen
- Using Top Trees For Easy Programming of Tree AlgorithmsDokument12 SeitenUsing Top Trees For Easy Programming of Tree AlgorithmsnothardNoch keine Bewertungen
- Which Spatial Partition Trees Are Adaptive To Intrinsic DimensionDokument12 SeitenWhich Spatial Partition Trees Are Adaptive To Intrinsic DimensionOmega AlphaNoch keine Bewertungen
- M. B. Yobas, J. N. Crook, D P. Ross - Credit Scoring Using Neural and Evolutionary TechniquesDokument15 SeitenM. B. Yobas, J. N. Crook, D P. Ross - Credit Scoring Using Neural and Evolutionary Techniqueshenrique_olivNoch keine Bewertungen
- Clustering With Shallow TreesDokument17 SeitenClustering With Shallow TreespasomagaNoch keine Bewertungen
- Term Paper in Stat 276: An Exposition of A Published ArticleDokument8 SeitenTerm Paper in Stat 276: An Exposition of A Published ArticleAngie Tobias - LozanoNoch keine Bewertungen
- Cluster Lecture 2Dokument14 SeitenCluster Lecture 2Dardo CurtiNoch keine Bewertungen
- A Practical Guide To Maxent For Modeling Species' Distributions: What It Does, and Why Inputs and Settings MatterDokument12 SeitenA Practical Guide To Maxent For Modeling Species' Distributions: What It Does, and Why Inputs and Settings MatterDiego Parra MuñozNoch keine Bewertungen
- DCA TutorialDokument10 SeitenDCA TutorialdeltochilumNoch keine Bewertungen
- ML Decode TE ITDokument71 SeitenML Decode TE ITomsonawane15203Noch keine Bewertungen
- A Practical Guide To MaxEntDokument12 SeitenA Practical Guide To MaxEntFajar SidiqNoch keine Bewertungen
- When Random Forests Fail: The Importance of SubsamplingDokument11 SeitenWhen Random Forests Fail: The Importance of SubsamplingjjwNoch keine Bewertungen
- LiDAR-derived Estimation of Canopy Cover DensityDokument8 SeitenLiDAR-derived Estimation of Canopy Cover DensityAliNoch keine Bewertungen
- Smoothed Analysis of Binary Search Trees Height Under PerturbationsDokument24 SeitenSmoothed Analysis of Binary Search Trees Height Under PerturbationsGhiya-chan MurakamiNoch keine Bewertungen
- Ecography - 2013 - Merow - A Practical Guide To MaxEnt For Modeling Species Distributions What It Does and Why InputsDokument12 SeitenEcography - 2013 - Merow - A Practical Guide To MaxEnt For Modeling Species Distributions What It Does and Why InputsThazin HtayNoch keine Bewertungen
- Nearest-Neighbour-Induced Isolation Similarity and Its Impact On Density-Based ClusteringDokument8 SeitenNearest-Neighbour-Induced Isolation Similarity and Its Impact On Density-Based ClusteringPrabath SamarasingheNoch keine Bewertungen
- Random ForestsDokument35 SeitenRandom ForestseasymakeleleNoch keine Bewertungen
- 6313-Article Text-9538-1-10-20200516Dokument8 Seiten6313-Article Text-9538-1-10-20200516chuvuachuoi90Noch keine Bewertungen
- Detection of Outliers in Circular Data U PDFDokument11 SeitenDetection of Outliers in Circular Data U PDFvivekreddyNoch keine Bewertungen
- Forest Tree Detection and Segmentation Using High Resolution Airborne LiDARDokument7 SeitenForest Tree Detection and Segmentation Using High Resolution Airborne LiDARAmanda Muchsin ChalikNoch keine Bewertungen
- 2.093 Term Project Frequency Response of TreesDokument31 Seiten2.093 Term Project Frequency Response of TreesDanielNoch keine Bewertungen
- Multi Tracking Icassp11Dokument4 SeitenMulti Tracking Icassp11jozek223Noch keine Bewertungen
- Random Survival Forests For High-Dimensional Data: Hemant Ishwaran, Udaya B. Kogalur, Xi Chen and Andy J. MinnDokument18 SeitenRandom Survival Forests For High-Dimensional Data: Hemant Ishwaran, Udaya B. Kogalur, Xi Chen and Andy J. MinnMindaugas ZickusNoch keine Bewertungen
- Iforest Vast18Dokument10 SeitenIforest Vast18張家輔Noch keine Bewertungen
- One-Sided Variations On Binary Search Trees: Hosam M. MahmoudDokument16 SeitenOne-Sided Variations On Binary Search Trees: Hosam M. Mahmoudgigi shiNoch keine Bewertungen
- Paper 1Dokument7 SeitenPaper 1RakeshconclaveNoch keine Bewertungen
- Improvements of TLAESA Nearest Neighbour Search Algorithm and Extension To Approximation SearchDokument7 SeitenImprovements of TLAESA Nearest Neighbour Search Algorithm and Extension To Approximation SearchGonzalo René Ccama RamosNoch keine Bewertungen
- Fuzzy Decision TreesDokument12 SeitenFuzzy Decision TreesVu Trung NguyenNoch keine Bewertungen
- Detrended Correspondence Analysis (Dca) : Steven M. HollandDokument14 SeitenDetrended Correspondence Analysis (Dca) : Steven M. HollandPaulaNoch keine Bewertungen
- TD1 ELTP 2023 StudentDokument2 SeitenTD1 ELTP 2023 StudentHoussam FoukiNoch keine Bewertungen
- Decision Tree Minority Entropy TitleDokument14 SeitenDecision Tree Minority Entropy TitleFranco Roberto Lopez FernandezNoch keine Bewertungen
- Antipole Tree IndexingDokument16 SeitenAntipole Tree IndexingJesus Alberto Arcia HernandezNoch keine Bewertungen
- Machine Learning: Practical Tutorial On Random Forest and Parameter Tuning in RDokument11 SeitenMachine Learning: Practical Tutorial On Random Forest and Parameter Tuning in RendaleNoch keine Bewertungen
- Optimising Spatial Declustering Weights 2002 - IAMGDokument6 SeitenOptimising Spatial Declustering Weights 2002 - IAMGBenNoch keine Bewertungen
- Bile Nia 2018Dokument9 SeitenBile Nia 2018aneetachristo94Noch keine Bewertungen
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDokument16 SeitenWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsKishan hariNoch keine Bewertungen
- Spatial JoinsDokument5 SeitenSpatial JoinsaramadeviNoch keine Bewertungen
- Steven 2Dokument18 SeitenSteven 2Steven SergioNoch keine Bewertungen
- Comparative Investigation of K-Means and K-Medoid Algorithm On Iris DataDokument4 SeitenComparative Investigation of K-Means and K-Medoid Algorithm On Iris DataIJERDNoch keine Bewertungen
- Identification of Water Bodies From High and Multi-Level Resolution Satellite Images Using Novel Feature Extracting TechniqueDokument7 SeitenIdentification of Water Bodies From High and Multi-Level Resolution Satellite Images Using Novel Feature Extracting TechniqueSEP-PublisherNoch keine Bewertungen
- Improving LIDARDokument10 SeitenImproving LIDARMartin Vogel VNoch keine Bewertungen
- Random ForestsDokument33 SeitenRandom ForestsDenis B.Noch keine Bewertungen
- 0practical Report PDFDokument65 Seiten0practical Report PDFZakiul Fahmi JailaniNoch keine Bewertungen
- Tweaking 3D Inversion Settings: M.H.Loke (Geotomo Software Pty LTD)Dokument22 SeitenTweaking 3D Inversion Settings: M.H.Loke (Geotomo Software Pty LTD)fsg1985Noch keine Bewertungen
- Stat214 Chapter 3Dokument34 SeitenStat214 Chapter 3Jehanne Dela CruzNoch keine Bewertungen
- Document Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012Dokument4 SeitenDocument Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012surendiran123Noch keine Bewertungen
- Fast Anomaly Detection for Large Data Using Fuzzy Rough SetsDokument10 SeitenFast Anomaly Detection for Large Data Using Fuzzy Rough SetsKamal El-SaadyNoch keine Bewertungen
- Legendre-Gallagher2001 Article EcologicallyMeaningfulTransfor PDFDokument10 SeitenLegendre-Gallagher2001 Article EcologicallyMeaningfulTransfor PDFAna Carolina Martins PereiraNoch keine Bewertungen
- 1 s2.0 S1877050923018549 MainDokument5 Seiten1 s2.0 S1877050923018549 MainjefferyleclercNoch keine Bewertungen
- Demonstration of Time Reversal Methods in Multipath Environment - 00117581Dokument4 SeitenDemonstration of Time Reversal Methods in Multipath Environment - 00117581Sunil KumarNoch keine Bewertungen
- Aviris Hyperspectral Images Compression Using 3d Spiht AlgorithmDokument6 SeitenAviris Hyperspectral Images Compression Using 3d Spiht AlgorithmIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNoch keine Bewertungen
- Classification Using Decision Trees: An SEO-Optimized TitleDokument0 SeitenClassification Using Decision Trees: An SEO-Optimized TitlepacharneajayNoch keine Bewertungen
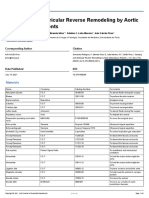
- Studying Left Ventricular Reverse Remodeling by Aortic Debanding in Rodents材料Dokument2 SeitenStudying Left Ventricular Reverse Remodeling by Aortic Debanding in Rodents材料bbeeNoch keine Bewertungen
- Final Exam - Supplement - 2021Dokument8 SeitenFinal Exam - Supplement - 2021VY NGUYỄN NGÔ PHƯƠNGNoch keine Bewertungen
- MOBILE-APPS Questionnaire - Developing and Validating A Scale To Measure The Attitudes and Perceptions of Undergraduate Students On Mobile Information LiteracyDokument10 SeitenMOBILE-APPS Questionnaire - Developing and Validating A Scale To Measure The Attitudes and Perceptions of Undergraduate Students On Mobile Information LiteracybbeeNoch keine Bewertungen
- The Electrolysis of Some Organic Compounds With Alternating CurrentDokument12 SeitenThe Electrolysis of Some Organic Compounds With Alternating CurrentbbeeNoch keine Bewertungen
- Fuzzy Metrics and Statistical Metric SpacesDokument9 SeitenFuzzy Metrics and Statistical Metric SpacesbbeeNoch keine Bewertungen
- Effect of Intravenous Fluid Treatment With A Balanced Solution Vs 0.9% Saline Solution On Mortality in Critically Ill PatientsDokument12 SeitenEffect of Intravenous Fluid Treatment With A Balanced Solution Vs 0.9% Saline Solution On Mortality in Critically Ill PatientsbbeeNoch keine Bewertungen
- Esa PDokument8 SeitenEsa PbbeeNoch keine Bewertungen
- Design of an optimal controller for electric power steering systemsDokument5 SeitenDesign of an optimal controller for electric power steering systemsbbeeNoch keine Bewertungen
- Operating Transverse Aortic Constriction With Absorbable Suture To Obtain Transient Myocardial HypertrophyDokument10 SeitenOperating Transverse Aortic Constriction With Absorbable Suture To Obtain Transient Myocardial HypertrophybbeeNoch keine Bewertungen
- Journey Towards "Her" Identity Remedios VaroDokument9 SeitenJourney Towards "Her" Identity Remedios VarobbeeNoch keine Bewertungen
- Hereditary Angioedema An Updated Experience With Patients With Angioedema in Puerto RicoDokument7 SeitenHereditary Angioedema An Updated Experience With Patients With Angioedema in Puerto RicobbeeNoch keine Bewertungen
- Endoscopic Submucosal Dissection Versus Endoscopic Mucosal Resection For Colorectal Tumors - A Systematic Review and Meta-AnalysisDokument6 SeitenEndoscopic Submucosal Dissection Versus Endoscopic Mucosal Resection For Colorectal Tumors - A Systematic Review and Meta-AnalysisbbeeNoch keine Bewertungen
- The Involvement and Mechanism of Febuxostat in Non-Alcoholic Fatty Liver Disease CellsDokument8 SeitenThe Involvement and Mechanism of Febuxostat in Non-Alcoholic Fatty Liver Disease CellsbbeeNoch keine Bewertungen
- A Method of Nodose Ganglia Injection in Sprague-Dawley RatDokument5 SeitenA Method of Nodose Ganglia Injection in Sprague-Dawley RatbbeeNoch keine Bewertungen
- The Mouse Isolated Perfused Kidney Technique材料Dokument2 SeitenThe Mouse Isolated Perfused Kidney Technique材料bbeeNoch keine Bewertungen
- Association of Non-High-Density Lipoprotein Cholesterol Measured in Adolescence, Young Adulthood, and Mid-Adulthood With Coronary Artery Calcification Measured in Mid-AdulthoodDokument8 SeitenAssociation of Non-High-Density Lipoprotein Cholesterol Measured in Adolescence, Young Adulthood, and Mid-Adulthood With Coronary Artery Calcification Measured in Mid-AdulthoodbbeeNoch keine Bewertungen
- MDR-ABC Transporters - Biomarkers in Rheumatoid ArthritisDokument9 SeitenMDR-ABC Transporters - Biomarkers in Rheumatoid ArthritisbbeeNoch keine Bewertungen
- Main Tension Steel in High Strength Concrete Deep and Short BeamsDokument13 SeitenMain Tension Steel in High Strength Concrete Deep and Short BeamsbbeeNoch keine Bewertungen
- Workload Assessment in Railway ControlDokument8 SeitenWorkload Assessment in Railway ControlbbeeNoch keine Bewertungen
- Anne Healy TestimonialDokument8 SeitenAnne Healy TestimonialbbeeNoch keine Bewertungen
- The Worldwide Epidemic of Diabetic RetinopathyDokument4 SeitenThe Worldwide Epidemic of Diabetic RetinopathybbeeNoch keine Bewertungen
- Directing Observership - Learning Through Observation-In The Rehearsal Room With Tony Award-Winning Director Kathleen MarshallDokument7 SeitenDirecting Observership - Learning Through Observation-In The Rehearsal Room With Tony Award-Winning Director Kathleen MarshallbbeeNoch keine Bewertungen
- Endothelium in Aortic Aneurysm Disease New InsightsDokument8 SeitenEndothelium in Aortic Aneurysm Disease New InsightsbbeeNoch keine Bewertungen
- Material Identification by Surface Reflection Analysis in Combination With Bundle Adjustment TechniqueDokument10 SeitenMaterial Identification by Surface Reflection Analysis in Combination With Bundle Adjustment TechniquebbeeNoch keine Bewertungen
- The Case of Wine - Understanding Chinese Gift-Giving BehaviorDokument27 SeitenThe Case of Wine - Understanding Chinese Gift-Giving BehaviorbbeeNoch keine Bewertungen
- Algorithms of Nondifferentiable Optimization - Development and ApplicationDokument12 SeitenAlgorithms of Nondifferentiable Optimization - Development and ApplicationbbeeNoch keine Bewertungen
- Cv-Morten Christian MelaaenDokument19 SeitenCv-Morten Christian MelaaenbbeeNoch keine Bewertungen
- Sustainable Finance - A Conceptual OutlineDokument62 SeitenSustainable Finance - A Conceptual OutlinebbeeNoch keine Bewertungen
- Fiber-Matrix Interfacial Characteristics in A Fiber Reinforced Ceramic Matrix CompositeDokument4 SeitenFiber-Matrix Interfacial Characteristics in A Fiber Reinforced Ceramic Matrix CompositebbeeNoch keine Bewertungen
- Thermal Degradation of Nicalon SiC FibersDokument13 SeitenThermal Degradation of Nicalon SiC FibersbbeeNoch keine Bewertungen
- Business Plan1Dokument38 SeitenBusiness Plan1Gwendolyn PansoyNoch keine Bewertungen
- Delhi Mumbai Award Status Mar 23Dokument11 SeitenDelhi Mumbai Award Status Mar 23Manoj DoshiNoch keine Bewertungen
- SCM PPT (Supply Chain Management)Dokument19 SeitenSCM PPT (Supply Chain Management)Mairaj NaseemNoch keine Bewertungen
- Indian ChronologyDokument467 SeitenIndian ChronologyModa Sattva100% (4)
- DBIRS SyllabusDokument2 SeitenDBIRS SyllabusAshitosh KadamNoch keine Bewertungen
- Statement Bank MBBDokument11 SeitenStatement Bank MBBminyak bidara01Noch keine Bewertungen
- Journal Sleep Walking 1Dokument7 SeitenJournal Sleep Walking 1Kita SemuaNoch keine Bewertungen
- AMB4520R0v06: Antenna SpecificationsDokument2 SeitenAMB4520R0v06: Antenna SpecificationsЕвгений ГрязевNoch keine Bewertungen
- The Clàsh The 0nly Band That MatteredDokument255 SeitenThe Clàsh The 0nly Band That MatteredNikos VaxevanidisNoch keine Bewertungen
- Your Results For: "Multiple-Choice Questions: B": DelayDokument4 SeitenYour Results For: "Multiple-Choice Questions: B": DelayawairmalikNoch keine Bewertungen
- Process of Producting High Carbon Ferro ChromeDokument5 SeitenProcess of Producting High Carbon Ferro ChromeSantosh Kumar MahtoNoch keine Bewertungen
- Intraoperative Nursing Care GuideDokument12 SeitenIntraoperative Nursing Care GuideDarlyn AmplayoNoch keine Bewertungen
- Rock Type Identification Flow Chart: Sedimentary SedimentaryDokument8 SeitenRock Type Identification Flow Chart: Sedimentary Sedimentarymeletiou stamatiosNoch keine Bewertungen
- Theory Is An Explanation Given To Explain Certain RealitiesDokument7 SeitenTheory Is An Explanation Given To Explain Certain Realitiestaizya cNoch keine Bewertungen
- Horizontal Machining Centers: No.40 Spindle TaperDokument8 SeitenHorizontal Machining Centers: No.40 Spindle TaperMax Litvin100% (1)
- Institutional Competency Assessment Instrument (ICAI)Dokument12 SeitenInstitutional Competency Assessment Instrument (ICAI)Bea EtacNoch keine Bewertungen
- Surface Coating ProcessesDokument7 SeitenSurface Coating ProcessesSailabala ChoudhuryNoch keine Bewertungen
- ComputerDokument26 SeitenComputer29.Kritika SinghNoch keine Bewertungen
- Echt Er Nacht 2014Dokument8 SeitenEcht Er Nacht 2014JamesNoch keine Bewertungen
- Teaching TrigonometryDokument20 SeitenTeaching Trigonometryapi-21940065Noch keine Bewertungen
- Current Developments in Testing Item Response Theory (IRT) : Prepared byDokument32 SeitenCurrent Developments in Testing Item Response Theory (IRT) : Prepared byMalar VengadesNoch keine Bewertungen
- The Transformation of Metaphysical ScienceDokument7 SeitenThe Transformation of Metaphysical ScienceblavskaNoch keine Bewertungen
- Consumer BehaviourDokument48 SeitenConsumer BehaviourdooncollegeNoch keine Bewertungen
- Rock Laboratory PricelistDokument1 SeiteRock Laboratory PricelistHerbakti Dimas PerdanaNoch keine Bewertungen
- Bahasa InggrisDokument8 SeitenBahasa InggrisArintaChairaniBanurea33% (3)
- Project Report VajDokument15 SeitenProject Report VajTamil SelvanNoch keine Bewertungen
- Dental System SoftwareDokument4 SeitenDental System SoftwareHahaNoch keine Bewertungen
- Connection Between Academic and Professional IntegrityDokument3 SeitenConnection Between Academic and Professional IntegrityJoshua NyabindaNoch keine Bewertungen
- Occupant Load CalculationsDokument60 SeitenOccupant Load CalculationsKAIVALYA TIWATNENoch keine Bewertungen
- Comparing Financial Performance of Conventional and Islamic BanksDokument9 SeitenComparing Financial Performance of Conventional and Islamic BanksIkbal HardiyantoNoch keine Bewertungen
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipVon EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipBewertung: 4.5 von 5 Sternen4.5/5 (1135)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingVon EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingBewertung: 4.5 von 5 Sternen4.5/5 (149)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisVon EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisBewertung: 4 von 5 Sternen4/5 (6)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisVon EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (30)
- Functional Training and Beyond: Building the Ultimate Superfunctional Body and MindVon EverandFunctional Training and Beyond: Building the Ultimate Superfunctional Body and MindBewertung: 4.5 von 5 Sternen4.5/5 (1)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingVon EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingBewertung: 4.5 von 5 Sternen4.5/5 (495)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageVon EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageBewertung: 5 von 5 Sternen5/5 (72)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisVon EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisVon EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisBewertung: 4.5 von 5 Sternen4.5/5 (22)
- Learn Spanish While SleepingVon EverandLearn Spanish While SleepingBewertung: 4 von 5 Sternen4/5 (20)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisVon EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisBewertung: 5 von 5 Sternen5/5 (3)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningVon EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningBewertung: 4.5 von 5 Sternen4.5/5 (55)
- The Story of the World, Vol. 2 AudiobookVon EverandThe Story of the World, Vol. 2 AudiobookBewertung: 5 von 5 Sternen5/5 (1)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerVon EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerBewertung: 4.5 von 5 Sternen4.5/5 (56)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisVon EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisBewertung: 5 von 5 Sternen5/5 (15)
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveVon EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveBewertung: 5 von 5 Sternen5/5 (1)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4.5 von 5 Sternen4.5/5 (1871)
- Think Ahead: 7 Decisions You Can Make Today for the God-Honoring Life You Want TomorrowVon EverandThink Ahead: 7 Decisions You Can Make Today for the God-Honoring Life You Want TomorrowBewertung: 5 von 5 Sternen5/5 (7)
- Learn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedVon EverandLearn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedNoch keine Bewertungen
- Follow The Leader: A Collection Of The Best Lectures On LeadershipVon EverandFollow The Leader: A Collection Of The Best Lectures On LeadershipBewertung: 5 von 5 Sternen5/5 (122)
- Summary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggVon EverandSummary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggBewertung: 4.5 von 5 Sternen4.5/5 (261)
- Now or Never: Your Epic Life in 5 StepsVon EverandNow or Never: Your Epic Life in 5 StepsBewertung: 4.5 von 5 Sternen4.5/5 (124)
- Learn Japanese While SleepingVon EverandLearn Japanese While SleepingBewertung: 5 von 5 Sternen5/5 (5)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveVon EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveBewertung: 4 von 5 Sternen4/5 (25)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingVon EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingBewertung: 4 von 5 Sternen4/5 (59)