Das könnte Ihnen auch gefallen
- Downtown 125i Specs and FeaturesDokument257 SeitenDowntown 125i Specs and FeaturesDavid BenitoNoch keine Bewertungen
- Glossary of Motor Terms LMRDokument20 SeitenGlossary of Motor Terms LMRKOBE LKONoch keine Bewertungen
- Himax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100Dokument1 SeiteHimax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100 Himax CR2816-1100Nohelia Luz Jiménez ValenzuelaNoch keine Bewertungen
- 4613 ReportDokument35 Seiten4613 ReportRUNLIN MA100% (1)
- (Single+Three) Phase Induction Motors Interview Questions SetDokument18 Seiten(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNoch keine Bewertungen
- Traction Assembly ShopDokument3 SeitenTraction Assembly ShopAshutosh Kumar Chaturvedi100% (1)
- Using PIC Microcontrollers to Control Triacs PhaseDokument22 SeitenUsing PIC Microcontrollers to Control Triacs PhaseMarko Lukic100% (1)
- Pic16f72 3 Phase Motor ControlDokument18 SeitenPic16f72 3 Phase Motor ControlMatias BerriosNoch keine Bewertungen
- Manual Lavadora Extractora Milnor Pellerin 3Dokument8 SeitenManual Lavadora Extractora Milnor Pellerin 3Diego B.E.Noch keine Bewertungen
- CMX 007 Adjustable Frequency DriveDokument9 SeitenCMX 007 Adjustable Frequency DriveJESUSCALVILLONoch keine Bewertungen
- SimPowerSystems Three-Phase NetworkDokument5 SeitenSimPowerSystems Three-Phase NetworkJauzie LastNoch keine Bewertungen
- Super-High Frequency Models and Behaviour PDFDokument23 SeitenSuper-High Frequency Models and Behaviour PDFalokinxxNoch keine Bewertungen
- Eddy Current BrakesDokument18 SeitenEddy Current BrakesAjoy RsNoch keine Bewertungen
- Water Jacket Motor PDFDokument8 SeitenWater Jacket Motor PDFsultaniusNoch keine Bewertungen
- Synchronous Machines and SCDokument6 SeitenSynchronous Machines and SCivancho04mNoch keine Bewertungen
- WBSCET Lab ExperimentsDokument5 SeitenWBSCET Lab Experimentsanirban0% (1)
- Performance Evaluation of Shunt Wound DC Motor in Process ControlDokument10 SeitenPerformance Evaluation of Shunt Wound DC Motor in Process ControlInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Ac DC 206i ManualDokument4 SeitenAc DC 206i Manualstef1463Noch keine Bewertungen
- Axpert KS-1-5KVA Manual 20160301Dokument35 SeitenAxpert KS-1-5KVA Manual 20160301ahmedmohamed2014Noch keine Bewertungen
- Flygt MAS 711 pump monitoring systemDokument8 SeitenFlygt MAS 711 pump monitoring systemrianandiyahooNoch keine Bewertungen
- Parallel Driving of Synchronous GeneratorDokument7 SeitenParallel Driving of Synchronous GeneratorMKIBETUNoch keine Bewertungen
- Dokumentation Energoutil 2015-35370 - enDokument37 SeitenDokumentation Energoutil 2015-35370 - enbrctlnNoch keine Bewertungen
- Catalogue Brushless DC Drives GB 02 2007Dokument56 SeitenCatalogue Brushless DC Drives GB 02 2007Bianca CerveiraNoch keine Bewertungen
- Single Phase I.M. Understanding LevelDokument3 SeitenSingle Phase I.M. Understanding LevelK S Ravi Kumar (MVGR EEE)Noch keine Bewertungen
- Power Rectifier ASIC ControllerDokument5 SeitenPower Rectifier ASIC ControllerQuang TaNoch keine Bewertungen
- Service Factors BaldorDokument1 SeiteService Factors BaldornautelNoch keine Bewertungen
- RLC 1st ManualDokument141 SeitenRLC 1st Manualjaved shaikh chaandNoch keine Bewertungen
- Rotor Shorted Turns - Detection and DiagnosticsDokument10 SeitenRotor Shorted Turns - Detection and Diagnosticswaqas mahmoodNoch keine Bewertungen
- Comparison Thyristor Vs ContactorDokument3 SeitenComparison Thyristor Vs ContactorZIPDASH0% (1)
- Potential Transformer Catalog ABBDokument4 SeitenPotential Transformer Catalog ABBstudent_ujjwol3163Noch keine Bewertungen
- Duromax Xp10000e Generator Owners ManualDokument28 SeitenDuromax Xp10000e Generator Owners Manualduromax0% (1)
- Current Lead and Lag ConceptDokument2 SeitenCurrent Lead and Lag ConceptUsman AmeenNoch keine Bewertungen
- No Load and Block Rotor Tests for 3-Phase Induction MotorDokument11 SeitenNo Load and Block Rotor Tests for 3-Phase Induction MotorKsr Akhil100% (1)
- Sony HCD-CP100 PDFDokument50 SeitenSony HCD-CP100 PDFvideosonNoch keine Bewertungen
- Ch24 DynModelsDokument155 SeitenCh24 DynModelselectrical_1012000Noch keine Bewertungen
- Brushless Sensor ConfigDokument11 SeitenBrushless Sensor ConfigAlexandru TimofteNoch keine Bewertungen
- Apollo Solar T80 T80HV Manual REV3 7-4-27 2011Dokument46 SeitenApollo Solar T80 T80HV Manual REV3 7-4-27 2011Andy1902Noch keine Bewertungen
- Induction Motor TestsDokument4 SeitenInduction Motor TestsVictor OdoyoNoch keine Bewertungen
- Electric Motor Wire MarkingDokument6 SeitenElectric Motor Wire MarkingcharmMonNoch keine Bewertungen
- Motor Shaft Misalignment Bearing Load AnalysisDokument11 SeitenMotor Shaft Misalignment Bearing Load AnalysisMashudi FikriNoch keine Bewertungen
- Información Seccionador ALDUTI S&CDokument20 SeitenInformación Seccionador ALDUTI S&CANTONIO OLMEDO AVALOSNoch keine Bewertungen
- BLDC Motor Catalogue 15-01-2015Dokument6 SeitenBLDC Motor Catalogue 15-01-2015nitin9860Noch keine Bewertungen
- PGT006 Centrifugal Pumps Intro Training PDFDokument14 SeitenPGT006 Centrifugal Pumps Intro Training PDFWiesen LimNoch keine Bewertungen
- Philadelphia: Faculty of Engineering and TechnologyDokument10 SeitenPhiladelphia: Faculty of Engineering and TechnologyHani BanatNoch keine Bewertungen
- Idmt RelayDokument3 SeitenIdmt RelayTinku ChoudhuryNoch keine Bewertungen
- PGF310 XGF315XDokument164 SeitenPGF310 XGF315Xkishore_bulli6666100% (1)
- AC Motor Name Plate - Terms & MeaningsDokument2 SeitenAC Motor Name Plate - Terms & Meaningsavandetq15Noch keine Bewertungen
- Barrajes Meda TensionDokument2 SeitenBarrajes Meda TensionFaVCMNoch keine Bewertungen
- 05 4 ServomotorsDokument118 Seiten05 4 ServomotorsJosé Carlos Macavilca RománNoch keine Bewertungen
- 4Dokument5 Seiten4Alsmany ArdabNoch keine Bewertungen
- PMSM Control Strategy ComparisonDokument4 SeitenPMSM Control Strategy Comparisonpersian67Noch keine Bewertungen
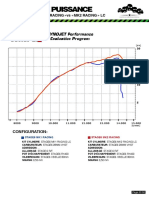
- Courbes - de - Puissance Stage6 mk2 Racing PDFDokument2 SeitenCourbes - de - Puissance Stage6 mk2 Racing PDFGombosTamásNoch keine Bewertungen
- Stepper Motor CatalogueDokument28 SeitenStepper Motor CatalogueSuvek KumarNoch keine Bewertungen
- Wind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesDokument6 SeitenWind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Synchronous CondenserDokument2 SeitenSynchronous CondenserblaagicaNoch keine Bewertungen
- Effect of High and Low VoltageDokument2 SeitenEffect of High and Low VoltageBhupinder SinghNoch keine Bewertungen
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDokument8 SeitenAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingNoch keine Bewertungen
- Resistor Control of Wound Rotor MotorsDokument11 SeitenResistor Control of Wound Rotor MotorsAndré LuizNoch keine Bewertungen
- ELE 2117 Lesson 11Dokument42 SeitenELE 2117 Lesson 11elioNoch keine Bewertungen
- Induction To AC Motors FAQDokument24 SeitenInduction To AC Motors FAQSrini VasanNoch keine Bewertungen
- 998-21151359 GMA Prescription's Standardization NewsletterDokument11 Seiten998-21151359 GMA Prescription's Standardization NewsletterMuthu KumaranNoch keine Bewertungen
- Ölflex® Heat 125 MC: Product InformationDokument4 SeitenÖlflex® Heat 125 MC: Product InformationMuthu KumaranNoch keine Bewertungen
- PPF Account Opening FormDokument2 SeitenPPF Account Opening Formprithvirajd20Noch keine Bewertungen
- Form11 1637681728121Dokument2 SeitenForm11 1637681728121Muthu KumaranNoch keine Bewertungen
- Ölflex® Classic 135 CH BK 0,6/1 KV: Product InformationDokument4 SeitenÖlflex® Classic 135 CH BK 0,6/1 KV: Product InformationMuthu KumaranNoch keine Bewertungen
- Form11 1637681728121Dokument2 SeitenForm11 1637681728121Muthu KumaranNoch keine Bewertungen
- Siemens Motor - Control - CentersDokument80 SeitenSiemens Motor - Control - Centersmarf123Noch keine Bewertungen
- ELSS Acknowledgement 1Dokument1 SeiteELSS Acknowledgement 1Muthu KumaranNoch keine Bewertungen
- Final Certificate For COVID-19 Vaccination: Beneficiary DetailsDokument1 SeiteFinal Certificate For COVID-19 Vaccination: Beneficiary DetailsMuthu KumaranNoch keine Bewertungen
- KPL Type: Intended Use For Currents of Discharge Up To 0.5 C5Dokument4 SeitenKPL Type: Intended Use For Currents of Discharge Up To 0.5 C5Muthu KumaranNoch keine Bewertungen
- Form 1-A (See Rules 5 (1), (3), 7,10 (A), 14 (D), and 18 (D) ) : Certificate of Medical FitnessDokument1 SeiteForm 1-A (See Rules 5 (1), (3), 7,10 (A), 14 (D), and 18 (D) ) : Certificate of Medical FitnessRushi KadgaonkarNoch keine Bewertungen
- Form 1-A (See Rules 5 (1), (3), 7,10 (A), 14 (D), and 18 (D) ) : Certificate of Medical FitnessDokument1 SeiteForm 1-A (See Rules 5 (1), (3), 7,10 (A), 14 (D), and 18 (D) ) : Certificate of Medical FitnessRushi KadgaonkarNoch keine Bewertungen
- Bus Duct ReactanceDokument160 SeitenBus Duct ReactanceAnonymous BBX2E87aHNoch keine Bewertungen
- Motor Calculations PDFDokument8 SeitenMotor Calculations PDFheroNoch keine Bewertungen
- 4RX254.0X12.7MM Al Busbar 6300A CapacityDokument1 Seite4RX254.0X12.7MM Al Busbar 6300A CapacityMuthu KumaranNoch keine Bewertungen
- 9AKK107680A7947 ABB Brochure Terra 94 - 124 - 184-Rev-BDokument24 Seiten9AKK107680A7947 ABB Brochure Terra 94 - 124 - 184-Rev-BVenkata Saiveer Reddy GuthaNoch keine Bewertungen
- 4RX254.0X12.7MM Al Busbar 6300A CapacityDokument1 Seite4RX254.0X12.7MM Al Busbar 6300A CapacityMuthu KumaranNoch keine Bewertungen
- Form11 1637681728121Dokument2 SeitenForm11 1637681728121Muthu KumaranNoch keine Bewertungen
- BS 6622 Cable ConstructionDokument2 SeitenBS 6622 Cable ConstructionMuthu KumaranNoch keine Bewertungen
- Schneider Electric Guide For The Design and Production of LV Power Factor Correction CubiclesDokument80 SeitenSchneider Electric Guide For The Design and Production of LV Power Factor Correction CubiclesShailesh ChettyNoch keine Bewertungen
- Cpaee Zac & Odacpøötéeö: Atae/ced To Cpaee Aåtf GougeDokument7 SeitenCpaee Zac & Odacpøötéeö: Atae/ced To Cpaee Aåtf GougeMuthu KumaranNoch keine Bewertungen
- IEC TR 61641 Rev Apr 2010Dokument12 SeitenIEC TR 61641 Rev Apr 2010Kenn NguyenNoch keine Bewertungen
- A View On Internal Arc Testing of Low Voltage SwitchgearDokument8 SeitenA View On Internal Arc Testing of Low Voltage SwitchgearAamir AliNoch keine Bewertungen
- Schneider Electric Guide For The Design and Production of LV Power Factor Correction CubiclesDokument80 SeitenSchneider Electric Guide For The Design and Production of LV Power Factor Correction CubiclesShailesh ChettyNoch keine Bewertungen
- Birds Counting WorksheetDokument41 SeitenBirds Counting Worksheetvidhyaeswaran2143Noch keine Bewertungen
- Technical Specification Compliance HT - 1 Panel - 24072020 - Smart Electric (ABB)Dokument48 SeitenTechnical Specification Compliance HT - 1 Panel - 24072020 - Smart Electric (ABB)Muthu KumaranNoch keine Bewertungen
- Guide To SavinngDokument63 SeitenGuide To SavinngBhaskarrao RaoNoch keine Bewertungen
- A View On Internal Arc Testing of Low Voltage SwitchgearDokument8 SeitenA View On Internal Arc Testing of Low Voltage SwitchgearAamir AliNoch keine Bewertungen
- BANK ACCOUNT FUNDAMENTALSDokument93 SeitenBANK ACCOUNT FUNDAMENTALSMuthu KumaranNoch keine Bewertungen
- Training Contactor PDFDokument11 SeitenTraining Contactor PDFAnonymous JBF08eAbtNoch keine Bewertungen
- Sample QuestionsDokument4 SeitenSample QuestionsdubstepoNoch keine Bewertungen
- Note 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsDokument13 SeitenNote 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsSapath Narsingh BogatiNoch keine Bewertungen
- Unit 4.2 Electrical Energy ManagementDokument61 SeitenUnit 4.2 Electrical Energy ManagementJoeb DsouzaNoch keine Bewertungen
- Motors (Electric, Hydraulic, Pneumatic) in Computer Integrated Manufacturing by Waqas Ali TunioDokument34 SeitenMotors (Electric, Hydraulic, Pneumatic) in Computer Integrated Manufacturing by Waqas Ali TuniowaqasalitunioNoch keine Bewertungen
- Hybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Dokument70 SeitenHybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Truong Quang Minh PH 1 8 9 0 4Noch keine Bewertungen
- Armature Reaction in DC Generator PDFDokument3 SeitenArmature Reaction in DC Generator PDFMukesh DhaleNoch keine Bewertungen
- Systems of Alternate Current Motors and Transformers / TeslaDokument20 SeitenSystems of Alternate Current Motors and Transformers / Teslaalexis.testrfNoch keine Bewertungen
- OUSL Sri Lanka Bachelor's Engineering Assignment on Electrical MachinesDokument3 SeitenOUSL Sri Lanka Bachelor's Engineering Assignment on Electrical MachinesDilshanNoch keine Bewertungen
- Single Phase Induction Motor and Special MachinesDokument29 SeitenSingle Phase Induction Motor and Special MachinesAlisha DasNoch keine Bewertungen
- BLDC Motor Control Fundamentals GuideDokument18 SeitenBLDC Motor Control Fundamentals GuideBala SubramanianNoch keine Bewertungen
- 4 Induction Motor VFD CDokument6 Seiten4 Induction Motor VFD Cliju101Noch keine Bewertungen
- Two Reaction TheoryDokument57 SeitenTwo Reaction TheorySumathi AmbunathanNoch keine Bewertungen
- Synchrounous MachineDokument22 SeitenSynchrounous MachinepugazhendiranNoch keine Bewertungen
- Electromagnetic Effects Part 2Dokument21 SeitenElectromagnetic Effects Part 2SamuelGideonSimatupaNoch keine Bewertungen
- EQUIVALENT CIRCUIT PARAMETERSDokument24 SeitenEQUIVALENT CIRCUIT PARAMETERSBu DakNoch keine Bewertungen
- BE8254 16 Marks IqDokument10 SeitenBE8254 16 Marks IqJairusNoch keine Bewertungen
- MCQ of TransformersDokument26 SeitenMCQ of Transformerskibrom atsbha67% (3)
- A High-Efficiency PM-Assisted Synchronous Reluctance Motor DriveDokument6 SeitenA High-Efficiency PM-Assisted Synchronous Reluctance Motor DrivejalilemadiNoch keine Bewertungen
- Generator ProtectionsDokument3 SeitenGenerator ProtectionsGnanaseharan Arunachalam100% (1)
- 5.5 KW SyRM Stator Lamination - 8 02 67 0015 - R00Dokument1 Seite5.5 KW SyRM Stator Lamination - 8 02 67 0015 - R00rakesh bardepurNoch keine Bewertungen
- GoldenMotor FOC Motor Controller GuideDokument6 SeitenGoldenMotor FOC Motor Controller Guide-Rendi Pratama-Noch keine Bewertungen
- Electrical MachineDokument12 SeitenElectrical MachineS.M.Murshed ManikNoch keine Bewertungen
- Chapter 2Dokument24 SeitenChapter 2Ahmed YaseenNoch keine Bewertungen
- DC Machines: Parts of DC MachineDokument51 SeitenDC Machines: Parts of DC MachineKUMARNoch keine Bewertungen
- AC MotorsDokument52 SeitenAC Motorsjennybunnyomg50% (6)
- Alternator at Various Loads, Armature Reaction & Voltage RegulationDokument3 SeitenAlternator at Various Loads, Armature Reaction & Voltage RegulationYash BansalNoch keine Bewertungen
- Industrial Machines IiDokument26 SeitenIndustrial Machines IiIsaac KimaruNoch keine Bewertungen
- TC2-Cross Reference Table For Standards On Rotating MachineryDokument4 SeitenTC2-Cross Reference Table For Standards On Rotating MachineryNguyenBaCuocNoch keine Bewertungen
- Switched Reluctance Motor Topologies A ComprehensiDokument25 SeitenSwitched Reluctance Motor Topologies A ComprehensiGeorgi KostovNoch keine Bewertungen