Das könnte Ihnen auch gefallen
- Astm C581Dokument5 SeitenAstm C581Phan Linh100% (1)
- 130 DynamicDokument6 Seiten130 Dynamicvijay kumarNoch keine Bewertungen
- Vaiana Et Al (2021)Dokument11 SeitenVaiana Et Al (2021)Raffaele CapuanoNoch keine Bewertungen
- Nonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftDokument24 SeitenNonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftSaberElAremNoch keine Bewertungen
- Diff. Equ. Practical ExamolesDokument5 SeitenDiff. Equ. Practical ExamolesMohammad YusufNoch keine Bewertungen
- AissaniDokument21 SeitenAissaniHakim KaciNoch keine Bewertungen
- On Analytical Approach For Analysis Influence of Mismatch-Induced Stress in A Heterostructure On Distributions of Concentrations of Dopants in A Multiemitter HeterotransistorDokument21 SeitenOn Analytical Approach For Analysis Influence of Mismatch-Induced Stress in A Heterostructure On Distributions of Concentrations of Dopants in A Multiemitter Heterotransistorcaijjournal2Noch keine Bewertungen
- Chen-Li2013 Article Size-dependentFreeVibrationAnaDokument15 SeitenChen-Li2013 Article Size-dependentFreeVibrationAnaSilas Sverre ChristensenNoch keine Bewertungen
- Effect of Throat Length On Steam Ejector Critical Back PressureDokument6 SeitenEffect of Throat Length On Steam Ejector Critical Back Pressuremuthu kujmarNoch keine Bewertungen
- Dao động tự do của thành mỏng ko đối xứngDokument18 SeitenDao động tự do của thành mỏng ko đối xứngThái Âu CôngNoch keine Bewertungen
- CFD in Mechanical EngineeringDokument10 SeitenCFD in Mechanical EngineeringMTNoch keine Bewertungen
- 1 s2.0 S0020768323001865 MainDokument16 Seiten1 s2.0 S0020768323001865 Maind_diasol38Noch keine Bewertungen
- Assessment of Pile Integrity Utilizing Non-Destructive Testing of Model Concrete PilesDokument16 SeitenAssessment of Pile Integrity Utilizing Non-Destructive Testing of Model Concrete PilesPicasso DebnathNoch keine Bewertungen
- FEM Modelling of Lateral-Torsional Buckling UsingDokument8 SeitenFEM Modelling of Lateral-Torsional Buckling UsingVishnuNoch keine Bewertungen
- Idges PDFDokument14 SeitenIdges PDFBarış ÖzcanNoch keine Bewertungen
- Assessment of Flutter Speed On Long Span BridgesDokument13 SeitenAssessment of Flutter Speed On Long Span BridgesHassanNoch keine Bewertungen
- Application of Classical and Operational Modal Analysis For Examination of Engineering StructuresDokument6 SeitenApplication of Classical and Operational Modal Analysis For Examination of Engineering StructuresShariq Hassan AwanNoch keine Bewertungen
- Band Gaps in The Relaxed Linear Micromorphic Continuum: ArticleDokument6 SeitenBand Gaps in The Relaxed Linear Micromorphic Continuum: Articlemark azertyNoch keine Bewertungen
- Microsoft Word - 134Dokument5 SeitenMicrosoft Word - 134ijaz fazilNoch keine Bewertungen
- Modal Analysis of Laminated Composite Plates by A New Hybrid Assumed Strain Finite ElementDokument11 SeitenModal Analysis of Laminated Composite Plates by A New Hybrid Assumed Strain Finite ElementKarthik KNoch keine Bewertungen
- Experimental Verification of Novel 3DOF Model ForDokument15 SeitenExperimental Verification of Novel 3DOF Model ForAhmed SalimNoch keine Bewertungen
- Method of Identifying Nonlinear Characteristic of Energy Dissipation in Dynamic Systems With One Degree of FreedomDokument6 SeitenMethod of Identifying Nonlinear Characteristic of Energy Dissipation in Dynamic Systems With One Degree of FreedomValentina Florez GiraldoNoch keine Bewertungen
- Ajp jp4199707C3139Dokument7 SeitenAjp jp4199707C3139burakNoch keine Bewertungen
- Free Vibration Analysis of Laminated Composite Beams Using Finite Element MethodDokument19 SeitenFree Vibration Analysis of Laminated Composite Beams Using Finite Element MethodVIGNESHA MASANANNoch keine Bewertungen
- Balancing Methodology of A Rigid Rotor Using ArtificialDokument8 SeitenBalancing Methodology of A Rigid Rotor Using ArtificialJuan Angel Martinez RamirezNoch keine Bewertungen
- Article 3Dokument10 SeitenArticle 3sami Tub ftNoch keine Bewertungen
- Nonlinear Impact Response of Doubly Curved Composite ShellsDokument6 SeitenNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNoch keine Bewertungen
- Analytical and Numerical Simulations For The Kinetics of Phase Separation in Iron (Fe-Cr-X (X Mo, Cu) ) Based On Ternary AlloysDokument12 SeitenAnalytical and Numerical Simulations For The Kinetics of Phase Separation in Iron (Fe-Cr-X (X Mo, Cu) ) Based On Ternary AlloyskemetvictNoch keine Bewertungen
- Microseismic Monitoring: Insights From Moment Tensor InversionDokument20 SeitenMicroseismic Monitoring: Insights From Moment Tensor InversionResolita Juliani SamosirNoch keine Bewertungen
- Dem Analysis of Vibration Screen PDFDokument6 SeitenDem Analysis of Vibration Screen PDFgunajiNoch keine Bewertungen
- Dynamic Analysis of Vibration Screen PDFDokument6 SeitenDynamic Analysis of Vibration Screen PDFBhuvanessh RcNoch keine Bewertungen
- Applicability of Modal Response Spectrum Analysis On Rocking StructuresDokument10 SeitenApplicability of Modal Response Spectrum Analysis On Rocking StructuresSebastian Contreras ContrerasNoch keine Bewertungen
- Damage Mechanisms Identification in Glas 20150504092555 919745Dokument10 SeitenDamage Mechanisms Identification in Glas 20150504092555 919745Lamia Nour Ben abdelrahmenNoch keine Bewertungen
- Forced Vibrations of A Cantilever Beam: European Journal of Physics September 2012Dokument11 SeitenForced Vibrations of A Cantilever Beam: European Journal of Physics September 2012anandhu s kumarNoch keine Bewertungen
- Numerical Simulations and Laboratory Measurements in Hydraulic JuDokument9 SeitenNumerical Simulations and Laboratory Measurements in Hydraulic JuBabak mahmoudiNoch keine Bewertungen
- Contribution of The Experimental Designs For A ProbabilisticDokument13 SeitenContribution of The Experimental Designs For A ProbabilistickeanshengNoch keine Bewertungen
- Research of The Stress Condition of The Normal Section of Re - 2016 - Procedia EDokument7 SeitenResearch of The Stress Condition of The Normal Section of Re - 2016 - Procedia Epraveen kbabuNoch keine Bewertungen
- Redirection of Exural Waves in Thin Plates: October 2021Dokument9 SeitenRedirection of Exural Waves in Thin Plates: October 2021Korabliki BlinNoch keine Bewertungen
- Stability Analysis of Concrete Gravity Dam Foundation Based On Catastrophe Model of Plastic Strain EnergyDokument6 SeitenStability Analysis of Concrete Gravity Dam Foundation Based On Catastrophe Model of Plastic Strain EnergyJec SarmientoNoch keine Bewertungen
- Electricity and Magnetism: Magnetostatics Induction, Vector PotentialDokument6 SeitenElectricity and Magnetism: Magnetostatics Induction, Vector PotentialEpic WinNoch keine Bewertungen
- 2 Jmcms 2011008 ON TRANSVERSAL VIBRATIONS Sanaullah DehrajDokument11 Seiten2 Jmcms 2011008 ON TRANSVERSAL VIBRATIONS Sanaullah DehrajBlushes of life ChromismNoch keine Bewertungen
- 1253-Article Text-2936-1-10-20230907Dokument12 Seiten1253-Article Text-2936-1-10-20230907ephremNoch keine Bewertungen
- Revisiting The Dang Van CriterionDokument5 SeitenRevisiting The Dang Van CriterionHsan HaddarNoch keine Bewertungen
- Dynamic Characteristics of A Beam and Distributed Spring-Mass SystemDokument15 SeitenDynamic Characteristics of A Beam and Distributed Spring-Mass SystemDang Viet HungNoch keine Bewertungen
- Magnetic Levitation.Dokument7 SeitenMagnetic Levitation.komedimetrotvNoch keine Bewertungen
- Imc Based Pid Control of A Magnetic Levitation System: SciencedirectDokument8 SeitenImc Based Pid Control of A Magnetic Levitation System: SciencedirectHoàng GiangNoch keine Bewertungen
- Modeling, Simulation and Validation of Material Flow On Conveyor BeltsDokument29 SeitenModeling, Simulation and Validation of Material Flow On Conveyor BeltsEdú CárdenasNoch keine Bewertungen
- Imerspec TecnologyDokument11 SeitenImerspec TecnologylauraNoch keine Bewertungen
- Comparison of Various Turbulence Models For Unsteady Flow Around A Finite Circular Cylinder at Re 20000Dokument13 SeitenComparison of Various Turbulence Models For Unsteady Flow Around A Finite Circular Cylinder at Re 20000Nicolàs Ortega GarcìaNoch keine Bewertungen
- The Effect of Uniaxial Stress On Band Structure AnDokument8 SeitenThe Effect of Uniaxial Stress On Band Structure AnJOSE CARLOS LEON GONZALEZNoch keine Bewertungen
- Zhang Et Al. - 2020 - Numerical Simulation of The Hydraulic Performances and Flow Pattern of Swallow-Tailed Flip BucketDokument14 SeitenZhang Et Al. - 2020 - Numerical Simulation of The Hydraulic Performances and Flow Pattern of Swallow-Tailed Flip BucketIvan Buitrago LeonNoch keine Bewertungen
- Algorithms 17 00121Dokument23 SeitenAlgorithms 17 00121jamel-shamsNoch keine Bewertungen
- Theoretical and Numerical Stability Analyses ofDokument28 SeitenTheoretical and Numerical Stability Analyses ofsaber javidNoch keine Bewertungen
- A Two-Scale Damage Model With Material Length: Cristian DascaluDokument8 SeitenA Two-Scale Damage Model With Material Length: Cristian DascaluyycNoch keine Bewertungen
- An Efficient Response Spectrum Analysis of Structures Under Multi-Support Seismic ExcitationsDokument12 SeitenAn Efficient Response Spectrum Analysis of Structures Under Multi-Support Seismic ExcitationsRahul KumarNoch keine Bewertungen
- Analysis of Static Loading of A Helicopter Tubular Skid Landing GearDokument2 SeitenAnalysis of Static Loading of A Helicopter Tubular Skid Landing Gearjshdvkjhxkhfv dslfkjsdjfldskjfNoch keine Bewertungen
- Identification of Utter Derivatives of Bridge Decks Using CFD-based Discrete-Time Aerodynamic ModelsDokument20 SeitenIdentification of Utter Derivatives of Bridge Decks Using CFD-based Discrete-Time Aerodynamic ModelsJose Manuel Gonzalez ContrerasNoch keine Bewertungen
- ContentServer PDFDokument15 SeitenContentServer PDFLUIS ISAAC LEON PARONoch keine Bewertungen
- Numerical Simulation of Lamb Wave Propagation in Metallic Foam A - A Parametric StudyDokument14 SeitenNumerical Simulation of Lamb Wave Propagation in Metallic Foam A - A Parametric Studyrksingh2204Noch keine Bewertungen
- Handbook of Fatigue Crack Propagation in Metallic StructuresVon EverandHandbook of Fatigue Crack Propagation in Metallic StructuresBewertung: 5 von 5 Sternen5/5 (1)
- New Directions in Dynamical Systems, Automatic Control and Singular PerturbationsVon EverandNew Directions in Dynamical Systems, Automatic Control and Singular PerturbationsNoch keine Bewertungen
- Pile Capacity jgj94Dokument8 SeitenPile Capacity jgj94Jesús Rodríguez RodríguezNoch keine Bewertungen
- 5.3 Dynamic Earth Pressure Methods: Mononobe-Okabe MethodDokument2 Seiten5.3 Dynamic Earth Pressure Methods: Mononobe-Okabe MethodJesús Rodríguez RodríguezNoch keine Bewertungen
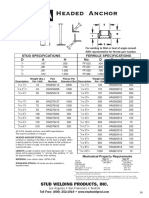
- Stud Welding Products, Inc.: 5 5?@AB#BA" " ! D$ G # HDokument1 SeiteStud Welding Products, Inc.: 5 5?@AB#BA" " ! D$ G # HJesús Rodríguez RodríguezNoch keine Bewertungen
- ZBB28441SA Combi Bottom: Easy Freezer MaintenanceDokument2 SeitenZBB28441SA Combi Bottom: Easy Freezer MaintenanceJesús Rodríguez RodríguezNoch keine Bewertungen
- Engm033: Durability of Bridges and Structures - Coursework 2Dokument1 SeiteEngm033: Durability of Bridges and Structures - Coursework 2Jesús Rodríguez RodríguezNoch keine Bewertungen
- Confirmation of Entry and Timetable: Certificate of Proficiency in English (Thursday) - June (P0) 2011Dokument1 SeiteConfirmation of Entry and Timetable: Certificate of Proficiency in English (Thursday) - June (P0) 2011Jesús Rodríguez RodríguezNoch keine Bewertungen
- T-Beam AnalysisDokument38 SeitenT-Beam AnalysisJesús Rodríguez RodríguezNoch keine Bewertungen
- Design of Box Culvert BridgeDokument26 SeitenDesign of Box Culvert BridgeJesús Rodríguez RodríguezNoch keine Bewertungen
- Why Is The Pollutant A Problem?: Toxicity, Poisoning and CarcinogenicityDokument1 SeiteWhy Is The Pollutant A Problem?: Toxicity, Poisoning and CarcinogenicityJesús Rodríguez RodríguezNoch keine Bewertungen
- Masonry WallsDokument50 SeitenMasonry WallsJesús Rodríguez RodríguezNoch keine Bewertungen
- 3-D Pile Group AnalysisDokument10 Seiten3-D Pile Group AnalysisJesús Rodríguez RodríguezNoch keine Bewertungen
- Flexural DesignDokument38 SeitenFlexural DesignJesús Rodríguez RodríguezNoch keine Bewertungen
- 8 WaterSupplyDokument1 Seite8 WaterSupplyJesús Rodríguez RodríguezNoch keine Bewertungen
- S D C M: OIL Rainage Atenas of AssachusettsDokument3 SeitenS D C M: OIL Rainage Atenas of AssachusettsJesús Rodríguez RodríguezNoch keine Bewertungen
- 6 UnitHydrographDokument1 Seite6 UnitHydrographJesús Rodríguez RodríguezNoch keine Bewertungen
- Elevation End Diaphragm Section A: Note To DetailerDokument1 SeiteElevation End Diaphragm Section A: Note To DetailerJesús Rodríguez RodríguezNoch keine Bewertungen
- Mylonakis Et Al Kinematic Moments Geotechnique 2001Dokument17 SeitenMylonakis Et Al Kinematic Moments Geotechnique 2001Jesús Rodríguez RodríguezNoch keine Bewertungen
- MAsoilsurveyareas2 MKPDokument1 SeiteMAsoilsurveyareas2 MKPJesús Rodríguez RodríguezNoch keine Bewertungen
- WetDokument32 SeitenWetJesús Rodríguez RodríguezNoch keine Bewertungen
- Set Up A CompanyDokument1 SeiteSet Up A CompanyJesús Rodríguez RodríguezNoch keine Bewertungen
- Physics Experiment - 2Dokument3 SeitenPhysics Experiment - 2Sandipan SamantaNoch keine Bewertungen
- Recent Developments of Mathematical Fluid MechanicsDokument478 SeitenRecent Developments of Mathematical Fluid MechanicsCarlos RomeroNoch keine Bewertungen
- Electronic EngineeringDokument50 SeitenElectronic EngineeringShafiNoch keine Bewertungen
- Jinko Solar Tiger Pro 570-590Wp DatasheetDokument2 SeitenJinko Solar Tiger Pro 570-590Wp DatasheetKwiringira Joshua NsâbàNoch keine Bewertungen
- 11 Chemistry NotesDokument47 Seiten11 Chemistry NotesHamza WaqifNoch keine Bewertungen
- 17 MayDokument17 Seiten17 MayTamerlan ShikhliNoch keine Bewertungen
- Uneb Chemistry Paper 1 2019Dokument12 SeitenUneb Chemistry Paper 1 2019Boniface RachkaraNoch keine Bewertungen
- Lab 5 PDFDokument6 SeitenLab 5 PDFSharifuddin RumanNoch keine Bewertungen
- DS Servo Motor ACM604V60-01-2500 enDokument3 SeitenDS Servo Motor ACM604V60-01-2500 enRafael Morais MachadoNoch keine Bewertungen
- 06 AET - Genset SizingDokument27 Seiten06 AET - Genset SizingkhudoNoch keine Bewertungen
- An Evaluation of The Possibilities of Using Turboexpanders at Pressure Regulator StationsDokument6 SeitenAn Evaluation of The Possibilities of Using Turboexpanders at Pressure Regulator StationsFranco Camacho CanchariNoch keine Bewertungen
- Vortice VORT HR 350 AVEL FolhetoDokument6 SeitenVortice VORT HR 350 AVEL FolhetoTiago SantosNoch keine Bewertungen
- OBJECT: To verify the relation C = I.ω.ω TheoryDokument4 SeitenOBJECT: To verify the relation C = I.ω.ω TheoryThe AIRS CreationsNoch keine Bewertungen
- Property SheetDokument6 SeitenProperty SheetsivaNoch keine Bewertungen
- IS31001UDokument2 SeitenIS31001UCristhian La FayeNoch keine Bewertungen
- DENYO45KVA - Diesel Engine Generator DCA 45LSK2Dokument2 SeitenDENYO45KVA - Diesel Engine Generator DCA 45LSK2charles riveraNoch keine Bewertungen
- TFP1420 09 2004 PDFDokument14 SeitenTFP1420 09 2004 PDFPhuNguyenHoangNoch keine Bewertungen
- QA05 QA01 QA06: Addressable DetectorsDokument1 SeiteQA05 QA01 QA06: Addressable DetectorsTâm Nguyễn ĐứcNoch keine Bewertungen
- FIGURE 3.11 Oblique Shock Wave Pattern.: Transmitted Without Publisher's Prior Permission. Violators Will Be ProsecutedDokument3 SeitenFIGURE 3.11 Oblique Shock Wave Pattern.: Transmitted Without Publisher's Prior Permission. Violators Will Be ProsecutedwhyfiveNoch keine Bewertungen
- Document From Manoj P NDokument16 SeitenDocument From Manoj P Nsparkysanthosh69Noch keine Bewertungen
- Chemistry Syllabus For First PUCDokument13 SeitenChemistry Syllabus For First PUCsmi_santhoshNoch keine Bewertungen
- 2 - Low-Speed CommissioningDokument20 Seiten2 - Low-Speed CommissioningQuang Pham DuyNoch keine Bewertungen
- HP Vs CCDokument1 SeiteHP Vs CCKhoinguyen NguyenNoch keine Bewertungen
- Scheme of Valuation/Answer KeyDokument4 SeitenScheme of Valuation/Answer KeySreejith S NairNoch keine Bewertungen
- PC4241 Statistical Mechanics AY2011/2012 Exam Solutions Question 1 (I)Dokument7 SeitenPC4241 Statistical Mechanics AY2011/2012 Exam Solutions Question 1 (I)cherinet SNoch keine Bewertungen
- Reinforced Concrete Design II - ACI 318: Design of Hollow Block and Ribbed SlabsDokument37 SeitenReinforced Concrete Design II - ACI 318: Design of Hollow Block and Ribbed Slabsmedo eidNoch keine Bewertungen
- DCB 66Dokument17 SeitenDCB 66JoeSmithNoch keine Bewertungen
- Yared Love Gear Box DesignDokument117 SeitenYared Love Gear Box DesignYigremachew bizualew AyenewNoch keine Bewertungen
- NVH 00 Program 2023Dokument6 SeitenNVH 00 Program 2023Nicola ColangeloNoch keine Bewertungen