Das könnte Ihnen auch gefallen
- Network Modeling and Simulation: A Practical PerspectiveVon EverandNetwork Modeling and Simulation: A Practical PerspectiveNoch keine Bewertungen
- Provided by UTHM Institutional RepositoryDokument35 SeitenProvided by UTHM Institutional RepositoryUsama Bin TariqNoch keine Bewertungen
- Thesis SampleDokument93 SeitenThesis Samplelangsuiriusgnal100% (1)
- Group 15Dokument50 SeitenGroup 15VikramNoch keine Bewertungen
- Provided by UTHM Institutional RepositoryDokument36 SeitenProvided by UTHM Institutional RepositoryEggi FerdiansyahNoch keine Bewertungen
- Hao Peng Yu MFKE2011Dokument28 SeitenHao Peng Yu MFKE2011othmanNoch keine Bewertungen
- Motor Control System Development Using Microcontroller Based On Pid ControllerDokument39 SeitenMotor Control System Development Using Microcontroller Based On Pid ControllerAsha PatilNoch keine Bewertungen
- Iot Based Smart Energy Metering and Power Theft ControlDokument61 SeitenIot Based Smart Energy Metering and Power Theft ControlGunasekaranNoch keine Bewertungen
- Project Report - Docx 11111Dokument46 SeitenProject Report - Docx 11111Narayan SutharNoch keine Bewertungen
- Balancing of Two PDFDokument67 SeitenBalancing of Two PDFرشيد بن صغيرNoch keine Bewertungen
- Design & Implementation of Automated Filling and Capping Machine Using PLC Mohd Asnawi Bin Saimon Tj223.p76.m65 2008 - 24 PagesDokument24 SeitenDesign & Implementation of Automated Filling and Capping Machine Using PLC Mohd Asnawi Bin Saimon Tj223.p76.m65 2008 - 24 PagesWahyu RaharjoNoch keine Bewertungen
- ARUN Batch 1 ReportDokument56 SeitenARUN Batch 1 Reportarun kumarNoch keine Bewertungen
- IndexDokument9 SeitenIndexprinceofnation_21Noch keine Bewertungen
- Three Phase Inverter For Induction Motor by Using Pi-Repetitive Controller With ArduinoDokument44 SeitenThree Phase Inverter For Induction Motor by Using Pi-Repetitive Controller With Arduinoملاك حمزهNoch keine Bewertungen
- Frequency Locked Loop DC Motor Speed Control and Monitoring SystemDokument98 SeitenFrequency Locked Loop DC Motor Speed Control and Monitoring SystemCHILUKA CHANDRAKANTHNoch keine Bewertungen
- Speed Control of DC Motor PDFDokument78 SeitenSpeed Control of DC Motor PDFLuis Eduardo RibeiroNoch keine Bewertungen
- Acknowledgement & ContentsDokument4 SeitenAcknowledgement & ContentsKishan Rajeew AmarasiriNoch keine Bewertungen
- ReportDokument55 SeitenReportYogesh SahayNoch keine Bewertungen
- SummaryDokument31 SeitenSummaryKamanziNoch keine Bewertungen
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDokument76 SeitenProject Report On Speed Control of DC Motor by Using PWM TechniquekishoreNoch keine Bewertungen
- Ajith Content ACKNOWLEDGEMENTDokument9 SeitenAjith Content ACKNOWLEDGEMENTSafalsha BabuNoch keine Bewertungen
- Neeraj PDFDokument55 SeitenNeeraj PDFNeeraj KanwarNoch keine Bewertungen
- TesiDokument77 SeitenTesiKifah ZaidanNoch keine Bewertungen
- Home Automation Project ReportDokument82 SeitenHome Automation Project ReportRohit NarainNoch keine Bewertungen
- Design of Automatic Gate MechanismDokument108 SeitenDesign of Automatic Gate Mechanismstpe97Noch keine Bewertungen
- Thesis PDFDokument269 SeitenThesis PDFdraggonboyNoch keine Bewertungen
- Load Balancing Control of Web Server Clusters: N-Tanks Model and A CTCT MethodDokument11 SeitenLoad Balancing Control of Web Server Clusters: N-Tanks Model and A CTCT MethodSanthanaiyappan SanthanamNoch keine Bewertungen
- Design of A Bay Control Unit in A Substation Automation SystemDokument63 SeitenDesign of A Bay Control Unit in A Substation Automation Systemscottsaw100% (2)
- Design and Implementation of The Auto Timer Using Micro ControllerDokument7 SeitenDesign and Implementation of The Auto Timer Using Micro ControllerAnudeep DeepuNoch keine Bewertungen
- Modeling and Control of A Brushless DC MotorDokument66 SeitenModeling and Control of A Brushless DC MotorBalajiKRamNoch keine Bewertungen
- Shoulder SurfingDokument49 SeitenShoulder Surfingpriyanka extazeeNoch keine Bewertungen
- CertificateDokument9 SeitenCertificateShristiNoch keine Bewertungen
- Batch 9Dokument90 SeitenBatch 9purushotham reddy mattiletiNoch keine Bewertungen
- PSM Report (AMMAR)Dokument77 SeitenPSM Report (AMMAR)Alif Imran MohamedNoch keine Bewertungen
- Acknowledgement: Reddy, Principal, Mallareddy Institute of Technology, For Giving Me This OpportunityDokument10 SeitenAcknowledgement: Reddy, Principal, Mallareddy Institute of Technology, For Giving Me This OpportunityKotagiri AravindNoch keine Bewertungen
- Yasir Amzad Ali MFKE2009Dokument113 SeitenYasir Amzad Ali MFKE2009Mohd Asri TaipNoch keine Bewertungen
- DC Micro Grid For Wind and Solar Power Integration: A Project ReportDokument58 SeitenDC Micro Grid For Wind and Solar Power Integration: A Project ReportVinayaga ProjectinstituteNoch keine Bewertungen
- ChopperDokument60 SeitenChopperSudeep BhesettyNoch keine Bewertungen
- Project Report FINALDokument66 SeitenProject Report FINALTEJAS KESARWANINoch keine Bewertungen
- 3 Axis EAPDokument46 Seiten3 Axis EAPJagruth GowdaNoch keine Bewertungen
- Documentation ExampleDokument89 SeitenDocumentation ExamplePavan PakkiNoch keine Bewertungen
- Thesis Report Group No 07Dokument233 SeitenThesis Report Group No 07Abu SaleahNoch keine Bewertungen
- 155 Documentation Edt FINALDokument96 Seiten155 Documentation Edt FINALBittu Goswami0% (1)
- Railway Track Crack DetectionDokument53 SeitenRailway Track Crack Detectionkota naikNoch keine Bewertungen
- Universiti Malaysia PahangDokument24 SeitenUniversiti Malaysia PahangVignesh RamakrishnanNoch keine Bewertungen
- Embedded Systems Microcontroller 8051: Training ReportDokument10 SeitenEmbedded Systems Microcontroller 8051: Training ReportParveen JaatNoch keine Bewertungen
- A Smart Tax Transfer System Using Iot 333333Dokument9 SeitenA Smart Tax Transfer System Using Iot 333333Ramesh SankarNoch keine Bewertungen
- Implementation of Dynamic Multipoint VPNDokument81 SeitenImplementation of Dynamic Multipoint VPNOmar EhabNoch keine Bewertungen
- Model Project Report For Internal ProjectDokument16 SeitenModel Project Report For Internal ProjectkcharshathNoch keine Bewertungen
- Single and Multi-Chip Microcontroller Interfacing: For the Motorola 6812Von EverandSingle and Multi-Chip Microcontroller Interfacing: For the Motorola 6812Noch keine Bewertungen
- PIC Basic Projects: 30 Projects using PIC BASIC and PIC BASIC PROVon EverandPIC Basic Projects: 30 Projects using PIC BASIC and PIC BASIC PROBewertung: 1 von 5 Sternen1/5 (1)
- Embedded SoPC Design with Nios II Processor and Verilog ExamplesVon EverandEmbedded SoPC Design with Nios II Processor and Verilog ExamplesNoch keine Bewertungen
- ASIC and FPGA Verification: A Guide to Component ModelingVon EverandASIC and FPGA Verification: A Guide to Component ModelingBewertung: 5 von 5 Sternen5/5 (1)
- Embedded Microcontroller Interfacing for M-COR ® SystemsVon EverandEmbedded Microcontroller Interfacing for M-COR ® SystemsNoch keine Bewertungen
- 8051 Microcontroller: An Applications Based IntroductionVon Everand8051 Microcontroller: An Applications Based IntroductionBewertung: 5 von 5 Sternen5/5 (6)
- Embedded SoPC Design with Nios II Processor and VHDL ExamplesVon EverandEmbedded SoPC Design with Nios II Processor and VHDL ExamplesNoch keine Bewertungen
- New Filter-Bank Multicarrier System Kim2018Dokument11 SeitenNew Filter-Bank Multicarrier System Kim2018khananuNoch keine Bewertungen
- Mode Selection Map-Based Vertical HandoverDokument13 SeitenMode Selection Map-Based Vertical HandoverkhananuNoch keine Bewertungen
- Al Hammad I 2018Dokument6 SeitenAl Hammad I 2018khananuNoch keine Bewertungen
- Screen Film RadiographyDokument18 SeitenScreen Film RadiographykhananuNoch keine Bewertungen
- Projection Radiography: EL5823/BE6203 Medical ImagingDokument71 SeitenProjection Radiography: EL5823/BE6203 Medical Imagingkhananu100% (1)
- Ergodic Capacity and OutageDokument174 SeitenErgodic Capacity and OutagekhananuNoch keine Bewertungen
- Computed Radiography & Digital Radiography: DR Mohit Goel JR II, 1/10/2013Dokument57 SeitenComputed Radiography & Digital Radiography: DR Mohit Goel JR II, 1/10/2013khananuNoch keine Bewertungen
- 2) Memory and Storage Devices: Multimedia HardwareDokument4 Seiten2) Memory and Storage Devices: Multimedia HardwarekhananuNoch keine Bewertungen
- Integral University, Lucknow: Department of Computer ApplicationDokument1 SeiteIntegral University, Lucknow: Department of Computer Applicationkhananu100% (1)
- Dual-Energy X-Ray RadiographyDokument20 SeitenDual-Energy X-Ray RadiographykhananuNoch keine Bewertungen
- After Completion of The Course, A Student Will Be Able ToDokument3 SeitenAfter Completion of The Course, A Student Will Be Able TokhananuNoch keine Bewertungen
- Assign1 PDFDokument1 SeiteAssign1 PDFkhananuNoch keine Bewertungen
- Integral University, LucknowDokument1 SeiteIntegral University, LucknowkhananuNoch keine Bewertungen
- Filter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationsDokument14 SeitenFilter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationskhananuNoch keine Bewertungen
- Neuro-Fuzzy Controller Design For A DC Motor Drive: University of Khartoum Engineering Journal (Uofkej)Dokument5 SeitenNeuro-Fuzzy Controller Design For A DC Motor Drive: University of Khartoum Engineering Journal (Uofkej)khananuNoch keine Bewertungen
- Assign2 3Dokument1 SeiteAssign2 3khananuNoch keine Bewertungen
- Filter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationsDokument14 SeitenFilter Bank Multicarrier Modulation Schemes For Future Mobile CommunicationskhananuNoch keine Bewertungen
- Wireless Telemonitoring of Physiological SignalsDokument3 SeitenWireless Telemonitoring of Physiological SignalskhananuNoch keine Bewertungen
- FBMC Ofdm BerDokument4 SeitenFBMC Ofdm BerkhananuNoch keine Bewertungen
- Filter Bank OFDM: A New Way of Looking at FBMC: Hao LinDokument6 SeitenFilter Bank OFDM: A New Way of Looking at FBMC: Hao LinkhananuNoch keine Bewertungen
- MATLAB Based Solar Tracking Photovoltaic Module Using MPPT AlgorithmDokument6 SeitenMATLAB Based Solar Tracking Photovoltaic Module Using MPPT AlgorithmkhananuNoch keine Bewertungen
- Ec-305: Antenna & Wave PropagationDokument1 SeiteEc-305: Antenna & Wave PropagationkhananuNoch keine Bewertungen
- Ec-302: Integrated CircuitsDokument1 SeiteEc-302: Integrated CircuitskhananuNoch keine Bewertungen
- Czech Republic GAAPDokument25 SeitenCzech Republic GAAPFin Cassie Lazy100% (1)
- MOFPED STRATEGIC PLAN 2016 - 2021 PrintedDokument102 SeitenMOFPED STRATEGIC PLAN 2016 - 2021 PrintedRujumba DukeNoch keine Bewertungen
- Canopy CountersuitDokument12 SeitenCanopy CountersuitJohn ArchibaldNoch keine Bewertungen
- Pthread TutorialDokument26 SeitenPthread Tutorialapi-3754827Noch keine Bewertungen
- INTERNSHIP PRESENTATION - Dhanya - 2020Dokument16 SeitenINTERNSHIP PRESENTATION - Dhanya - 2020Sanitha MichailNoch keine Bewertungen
- Power For All - Myth or RealityDokument11 SeitenPower For All - Myth or RealityAshutosh BhaktaNoch keine Bewertungen
- Elliot WaveDokument11 SeitenElliot WavevikramNoch keine Bewertungen
- Nissan E-NV200 Combi UKDokument31 SeitenNissan E-NV200 Combi UKMioMaulenovoNoch keine Bewertungen
- Admissibility of Whatsapp Messages in Court For Family MattersDokument3 SeitenAdmissibility of Whatsapp Messages in Court For Family Mattersnajihah adeliNoch keine Bewertungen
- MEMORANDUMDokument8 SeitenMEMORANDUMAdee JocsonNoch keine Bewertungen
- Descriptive Statistics - SPSS Annotated OutputDokument13 SeitenDescriptive Statistics - SPSS Annotated OutputLAM NGUYEN VO PHINoch keine Bewertungen
- PlsqldocDokument21 SeitenPlsqldocAbhishekNoch keine Bewertungen
- Hardware Architecture For Nanorobot Application in Cancer TherapyDokument7 SeitenHardware Architecture For Nanorobot Application in Cancer TherapyCynthia CarolineNoch keine Bewertungen
- Delta PresentationDokument36 SeitenDelta Presentationarch_ianNoch keine Bewertungen
- KV Tripple Eccentric Butterfly Valve-LinDokument12 SeitenKV Tripple Eccentric Butterfly Valve-LinWelma JohnsonNoch keine Bewertungen
- Lenskart SheetDokument1 SeiteLenskart SheetThink School libraryNoch keine Bewertungen
- Curamik Design Rules DBC 20150901Dokument8 SeitenCuramik Design Rules DBC 20150901Ale VuNoch keine Bewertungen
- Historical DocumentsDokument82 SeitenHistorical Documentsmanavjha29Noch keine Bewertungen
- Pro Tools ShortcutsDokument5 SeitenPro Tools ShortcutsSteveJones100% (1)
- Remuneration Is Defined As Payment or Compensation Received For Services or Employment andDokument3 SeitenRemuneration Is Defined As Payment or Compensation Received For Services or Employment andWitty BlinkzNoch keine Bewertungen
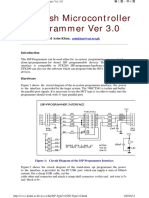
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDokument4 SeitenISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićNoch keine Bewertungen
- CY8 C95 X 0 ADokument32 SeitenCY8 C95 X 0 AAnonymous 60esBJZIj100% (1)
- Understanding Consumer and Business Buyer BehaviorDokument47 SeitenUnderstanding Consumer and Business Buyer BehaviorJia LeNoch keine Bewertungen
- STM Series Solar ControllerDokument2 SeitenSTM Series Solar ControllerFaris KedirNoch keine Bewertungen
- UCAT SJT Cheat SheetDokument3 SeitenUCAT SJT Cheat Sheetmatthewgao78Noch keine Bewertungen
- Salem Telephone CompanyDokument4 SeitenSalem Telephone Company202211021 imtnagNoch keine Bewertungen
- Mounting BearingDokument4 SeitenMounting Bearingoka100% (1)
- BPL-DF 2617aedrDokument3 SeitenBPL-DF 2617aedrBiomedical Incharge SRM TrichyNoch keine Bewertungen
- Capsule Research ProposalDokument4 SeitenCapsule Research ProposalAilyn Ursal80% (5)
- ML7999A Universal Parallel-Positioning Actuator: FeaturesDokument8 SeitenML7999A Universal Parallel-Positioning Actuator: Featuresfrank torresNoch keine Bewertungen