Das könnte Ihnen auch gefallen
- Amateur's Telescope Was First Published in 1920. However, Unlike Ellison's TimeDokument4 SeitenAmateur's Telescope Was First Published in 1920. However, Unlike Ellison's Timemohamadazaresh0% (1)
- Eyepiece Case by Rod NabholzDokument11 SeitenEyepiece Case by Rod NabholzGildásio AmorimNoch keine Bewertungen
- Matm Introduction 2Dokument14 SeitenMatm Introduction 2bobNoch keine Bewertungen
- Fundamental Course: Fourier Optics: Lecture NotesDokument42 SeitenFundamental Course: Fourier Optics: Lecture NotesJorge GuerreroNoch keine Bewertungen
- Characteristics of A Good Programming LanguageDokument4 SeitenCharacteristics of A Good Programming LanguageVinish Monga100% (1)
- Telescopes With Fixed Position EyepiecesDokument24 SeitenTelescopes With Fixed Position Eyepiecesapi-3733788100% (1)
- 65 XXXDokument6 Seiten65 XXXpahia3118Noch keine Bewertungen
- Familiarization of Observation Instruments Use in AstronomyDokument53 SeitenFamiliarization of Observation Instruments Use in AstronomyArunava Das AdhikaryNoch keine Bewertungen
- How To Make A Projector and TelescopeDokument18 SeitenHow To Make A Projector and TelescopeAbhishek GargNoch keine Bewertungen
- 6 Inch Reflector PlansDokument12 Seiten6 Inch Reflector PlansSektordrNoch keine Bewertungen
- Geometrical Optics GuideDokument9 SeitenGeometrical Optics GuidefarehaNoch keine Bewertungen
- The Endemann Effect: A New Concept in High-Power Optics: Telescope TechniquesDokument6 SeitenThe Endemann Effect: A New Concept in High-Power Optics: Telescope TechniquesbirbiburbiNoch keine Bewertungen
- Photographic Plates Vs CCD in AstronomyDokument6 SeitenPhotographic Plates Vs CCD in Astronomyapi-3733788100% (2)
- The New CCD Astronomy PDFDokument486 SeitenThe New CCD Astronomy PDFJosé María FernándezNoch keine Bewertungen
- Optics-Testing Your TelescopeDokument3 SeitenOptics-Testing Your TelescopeAnonymous cy0Ei0Noch keine Bewertungen
- Circuit Ideas I Projects I Schematics I RoboticsDokument16 SeitenCircuit Ideas I Projects I Schematics I RoboticsBo Tauk HteinNoch keine Bewertungen
- Design Optimisation of MAGSPLIT - A Magnetic Power Split e-CVTDokument58 SeitenDesign Optimisation of MAGSPLIT - A Magnetic Power Split e-CVTbnbaNoch keine Bewertungen
- The Ray Model of LightDokument8 SeitenThe Ray Model of LightNikoli MajorNoch keine Bewertungen
- Airline-Portable 8Dokument12 SeitenAirline-Portable 8geraldino2509208Noch keine Bewertungen
- Primer - eBook-ENG PDFDokument370 SeitenPrimer - eBook-ENG PDFAnonymous wCszHgNoch keine Bewertungen
- Telescope WikiDokument7 SeitenTelescope Wikitirth_diwaniNoch keine Bewertungen
- The Ronchi TestDokument5 SeitenThe Ronchi TestAnik ChaudhuriNoch keine Bewertungen
- Handbook of Optics: Sponsored by The Optical Society of AmericaDokument12 SeitenHandbook of Optics: Sponsored by The Optical Society of AmericaThatoNoch keine Bewertungen
- Programming A Problem-Oriented LanguageDokument142 SeitenProgramming A Problem-Oriented Languageturboc201Noch keine Bewertungen
- ExokernelDokument15 SeitenExokernelsaroj.xtrim8440Noch keine Bewertungen
- Sizing Up The Newtonian Secondary: Telescope TechniquesDokument6 SeitenSizing Up The Newtonian Secondary: Telescope TechniquesbirbiburbiNoch keine Bewertungen
- A Modified Gregorian TelescopeDokument4 SeitenA Modified Gregorian TelescopebirbiburbiNoch keine Bewertungen
- Book of Softkeys Volume 1Dokument162 SeitenBook of Softkeys Volume 1aforgette1513Noch keine Bewertungen
- c1541II ManualDokument55 Seitenc1541II ManualbaneDocsNoch keine Bewertungen
- Lisp - Tears of Joy Part 7Dokument4 SeitenLisp - Tears of Joy Part 7ksenthil77Noch keine Bewertungen
- 10 Dollar Telescope PlansDokument9 Seiten10 Dollar Telescope Planssandhi88Noch keine Bewertungen
- Components, Frameworks, Patterns Ralph E. JohnsonDokument23 SeitenComponents, Frameworks, Patterns Ralph E. JohnsonUesley Da Silva MeloNoch keine Bewertungen
- Basics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of EngineeringDokument34 SeitenBasics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of Engineeringkishore sNoch keine Bewertungen
- A 3-D CPU-FPGA-DRAM Hybrid Architecture For Low-Power ComputationDokument14 SeitenA 3-D CPU-FPGA-DRAM Hybrid Architecture For Low-Power ComputationBoppidiSrikanthNoch keine Bewertungen
- Ray Optics by SenjicsDokument49 SeitenRay Optics by SenjicssenjicsNoch keine Bewertungen
- Wave OpticsDokument18 SeitenWave OpticsTushar SharmaNoch keine Bewertungen
- Advanced Concepts On Top of Object-Oriented PrograDokument11 SeitenAdvanced Concepts On Top of Object-Oriented PrograHasnin shahNoch keine Bewertungen
- Appendix A TestingDokument4 SeitenAppendix A TestingStef ScNoch keine Bewertungen
- Astrolumina QHY5L User ManualDokument18 SeitenAstrolumina QHY5L User ManualRatnesh100% (1)
- Recent Developments in Permanent Magnet Gear Systems & MachinesDokument32 SeitenRecent Developments in Permanent Magnet Gear Systems & MachinesMimidbe Bibi100% (1)
- Zeiss - The Clean Microscope PDFDokument20 SeitenZeiss - The Clean Microscope PDFperla_canto_1100% (1)
- Schiefspiegler ToolkitDokument5 SeitenSchiefspiegler ToolkiteolocosNoch keine Bewertungen
- Amiga Boot SequenceDokument2 SeitenAmiga Boot SequenceDanH63100% (4)
- Portable CDK Alt-Az TelescopeDokument13 SeitenPortable CDK Alt-Az Telescopemcuzic2002100% (3)
- Making A Reflector TelescopeDokument10 SeitenMaking A Reflector Telescopemaxxand100% (1)
- Geometric Optics 1Dokument52 SeitenGeometric Optics 1Ugwuegede victorNoch keine Bewertungen
- A GAL Programmer For LINUX PCsDokument14 SeitenA GAL Programmer For LINUX PCsluciednaNoch keine Bewertungen
- Computes All About The Commodore 64 Vol2Dokument517 SeitenComputes All About The Commodore 64 Vol2TrinummusNoch keine Bewertungen
- MICROCONTROLADOR 68332 - Users - ManualDokument388 SeitenMICROCONTROLADOR 68332 - Users - ManualJosé Luiz CitolinoNoch keine Bewertungen
- DIY Goto ControllerDokument22 SeitenDIY Goto Controllercsavarga100% (1)
- PVC TelescopeDokument7 SeitenPVC TelescopeMitchelGramaticaNoch keine Bewertungen
- Commodore 128 Programmers Reference GuideDokument758 SeitenCommodore 128 Programmers Reference Guidelinux cernelNoch keine Bewertungen
- Commodore World Issue 23Dokument44 SeitenCommodore World Issue 23Steven D100% (1)
- Binoculars Mechanics c1Dokument34 SeitenBinoculars Mechanics c1jose cabelloNoch keine Bewertungen
- CCD Noise SourcesDokument14 SeitenCCD Noise Sourcesapi-3733788Noch keine Bewertungen
- 65GZ032prg v0.11Dokument77 Seiten65GZ032prg v0.11DaveNoch keine Bewertungen
- Shanghai Tower: By-Aditi Pawar and Yadnyayee PawarDokument10 SeitenShanghai Tower: By-Aditi Pawar and Yadnyayee PawarYadnyayee PawarNoch keine Bewertungen
- November PDFDokument409 SeitenNovember PDFNihal JamadarNoch keine Bewertungen
- IATA Passenger Interline AgreementDokument34 SeitenIATA Passenger Interline AgreementMarishi0% (1)
- MACN-R000000471 - Affidavit of UCC1 Financing Statement (JUDICIARY COURT OF THE STATE OF NEW JERSEY)Dokument24 SeitenMACN-R000000471 - Affidavit of UCC1 Financing Statement (JUDICIARY COURT OF THE STATE OF NEW JERSEY)Sharon T Gale BeyNoch keine Bewertungen
- Department of Education: Region II - Cagayan Valley Schools Division of Nueva VizcayaDokument3 SeitenDepartment of Education: Region II - Cagayan Valley Schools Division of Nueva VizcayasherileneNoch keine Bewertungen
- Computer Organization and ArchitectureDokument12 SeitenComputer Organization and ArchitecturepadmanabhanprathyushNoch keine Bewertungen
- Uninor ProjectDokument87 SeitenUninor ProjectALOK BHARTINoch keine Bewertungen
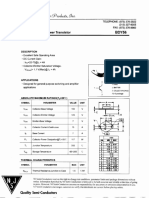
- Silicon NPN Power Transistor: DescriptionDokument2 SeitenSilicon NPN Power Transistor: DescriptionBarry LeppanNoch keine Bewertungen
- Global Food SecurityDokument11 SeitenGlobal Food SecurityMarjorie O. Malinao100% (1)
- 4 4 Measure of Relative PositionDokument7 Seiten4 4 Measure of Relative PositionFlbrb GamingNoch keine Bewertungen
- Introduction to SAP ABAP ProgrammingDokument25 SeitenIntroduction to SAP ABAP Programmingvickramravi16Noch keine Bewertungen
- Level C 211005Dokument1 SeiteLevel C 211005Olusola OluwaseunNoch keine Bewertungen
- AIIMS Gorakhpur Patient Diet Services TenderDokument36 SeitenAIIMS Gorakhpur Patient Diet Services TenderSumeet TripathiNoch keine Bewertungen
- KFD2 SR2 Ex2.wDokument4 SeitenKFD2 SR2 Ex2.wjackyt09Noch keine Bewertungen
- CIMAC WG08 2014 05 Guideline Fuel Scenarios Impact LubricationDokument19 SeitenCIMAC WG08 2014 05 Guideline Fuel Scenarios Impact LubricationozakyusNoch keine Bewertungen
- SAP PP Questionnaire: The Following Are Some SAP PP Questionnaires Which You Can TryDokument5 SeitenSAP PP Questionnaire: The Following Are Some SAP PP Questionnaires Which You Can Tryabhi_ray22Noch keine Bewertungen
- Section 7 Quiz AnswersDokument6 SeitenSection 7 Quiz Answersdaemon29Noch keine Bewertungen
- Dgtin-Quiz-Part 1Dokument43 SeitenDgtin-Quiz-Part 1Sadiqu ZzamanNoch keine Bewertungen
- 2011 Certified Developer Exam Instructions v1Dokument6 Seiten2011 Certified Developer Exam Instructions v1Prateek LathNoch keine Bewertungen
- IOSA Guidance For Safety Monitoring Under COVID-19: Edition 5 - 05 May 2021Dokument18 SeitenIOSA Guidance For Safety Monitoring Under COVID-19: Edition 5 - 05 May 2021Pilot Pilot380Noch keine Bewertungen
- Critical challenges to adopting DevOps culture in organizationsDokument11 SeitenCritical challenges to adopting DevOps culture in organizationsVitor AlmeidaNoch keine Bewertungen
- Come Fly With MeDokument6 SeitenCome Fly With MeKintyre On Record100% (2)
- EthicsDokument192 SeitenEthicsJay P. CuevasNoch keine Bewertungen
- Microprocessor and InterfacingDokument9 SeitenMicroprocessor and Interfacingsree2728Noch keine Bewertungen
- Classification and Composition of Fruits and VegetablesDokument27 SeitenClassification and Composition of Fruits and VegetablesLau Yu BinNoch keine Bewertungen
- Wideband Rec FDokument9 SeitenWideband Rec FMontaha BouezzeddineNoch keine Bewertungen
- THE ART OF ASKING POWERFUL QUESTIONSDokument9 SeitenTHE ART OF ASKING POWERFUL QUESTIONSrobrussell6097Noch keine Bewertungen
- AMIE Study Material & Admission Packages for AMIE(I) Study Circle in RoorkeeDokument53 SeitenAMIE Study Material & Admission Packages for AMIE(I) Study Circle in RoorkeeSrimannarayana NandamNoch keine Bewertungen
- Chapter 1Dokument28 SeitenChapter 1bugima1Noch keine Bewertungen
- MIBM Placement Brochure 19-20Dokument32 SeitenMIBM Placement Brochure 19-20पै. दिपक सरडेNoch keine Bewertungen