Das könnte Ihnen auch gefallen
- Engineering Mechanics II (Dynamics) (MEng1042. CH 2Dokument89 SeitenEngineering Mechanics II (Dynamics) (MEng1042. CH 2Agare TubeNoch keine Bewertungen
- Design of Truss Structures Lecture NotesDokument20 SeitenDesign of Truss Structures Lecture NotesyellowpawpawNoch keine Bewertungen
- ME 16 - Introduction + Fundamentals + Forces (Up To Scalar Rectangular Components) 2 PDFDokument25 SeitenME 16 - Introduction + Fundamentals + Forces (Up To Scalar Rectangular Components) 2 PDFAshley Young100% (2)
- Final Exam CEE 211: Fluid Mechanics Total Marks: 60 Time: 2.0 HoursDokument2 SeitenFinal Exam CEE 211: Fluid Mechanics Total Marks: 60 Time: 2.0 HoursAvijit SahaNoch keine Bewertungen
- Engineering Mechanics 1Dokument109 SeitenEngineering Mechanics 1Adnan KhanNoch keine Bewertungen
- 1.project EngineeringDokument40 Seiten1.project EngineeringBhawesh SthaNoch keine Bewertungen
- Groundwater exploitation and overexploitation: Mean residence times and sustainable useDokument20 SeitenGroundwater exploitation and overexploitation: Mean residence times and sustainable useRae PlazaNoch keine Bewertungen
- Ce 404-Sec11Dokument20 SeitenCe 404-Sec11Yasser AlghrafyNoch keine Bewertungen
- Chapter-I-Stress-1 11 21 3Dokument5 SeitenChapter-I-Stress-1 11 21 3Joshua John JulioNoch keine Bewertungen
- Engineering Economy - Lecture 1Dokument15 SeitenEngineering Economy - Lecture 1Patty Seyo0% (1)
- Classification of AggregateDokument6 SeitenClassification of Aggregatewpt civilNoch keine Bewertungen
- CAD Presentation on Computer Aided DraftingDokument18 SeitenCAD Presentation on Computer Aided DraftingRoHan ShaRmaNoch keine Bewertungen
- Mohr CircleDokument12 SeitenMohr CircleSerhat CelepNoch keine Bewertungen
- The Construction Industry in The Nigeria Quest For MDGs Accomplishment The Construction Industry in The Nigeria Quest For MDGs Accomplishment.Dokument4 SeitenThe Construction Industry in The Nigeria Quest For MDGs Accomplishment The Construction Industry in The Nigeria Quest For MDGs Accomplishment.O.D. OguntayoNoch keine Bewertungen
- Dokumen - Tips Cec 103 Workshop Technology 1Dokument128 SeitenDokumen - Tips Cec 103 Workshop Technology 1Yusuf MuhammedNoch keine Bewertungen
- ElasticityDokument38 SeitenElasticityIndra Dewa PutraNoch keine Bewertungen
- Critical state model interprets soil behaviorDokument56 SeitenCritical state model interprets soil behaviorSeidu ZayedeNoch keine Bewertungen
- WREDokument25 SeitenWREcj salesNoch keine Bewertungen
- Basic Fluid Concepts and Properties (μ, ρ, γDokument41 SeitenBasic Fluid Concepts and Properties (μ, ρ, γMiraJo-LingNoch keine Bewertungen
- INTRODUCTION TO COMPUTER AIDED DESIGN RahulDokument6 SeitenINTRODUCTION TO COMPUTER AIDED DESIGN RahulRishabhNoch keine Bewertungen
- Applied Mechanics-Statics III PDFDokument24 SeitenApplied Mechanics-Statics III PDFTasha ANoch keine Bewertungen
- Mulungushi University Highway Engineering CourseDokument20 SeitenMulungushi University Highway Engineering CoursePenelope MalilweNoch keine Bewertungen
- Stresses and Strains PDFDokument44 SeitenStresses and Strains PDFAnvi JainNoch keine Bewertungen
- Two-Lane Highway Capacity and Level of Service AnalysisDokument36 SeitenTwo-Lane Highway Capacity and Level of Service AnalysisJames LaurentNoch keine Bewertungen
- Eng. Books G DriveDokument1 SeiteEng. Books G DriveMico Castillo CampoNoch keine Bewertungen
- Gpa Calculator - Wec Wah Cantt-2Dokument5 SeitenGpa Calculator - Wec Wah Cantt-2FahadNoch keine Bewertungen
- Prefi Calculus DraftDokument2 SeitenPrefi Calculus Draftralph crucilloNoch keine Bewertungen
- Bending Stresses in BeamsDokument30 SeitenBending Stresses in BeamsdvarsastryNoch keine Bewertungen
- Permutation (E) and Combination Assignment/sample Paper by ANURAG TYAGI CLASSESDokument16 SeitenPermutation (E) and Combination Assignment/sample Paper by ANURAG TYAGI CLASSESANURAG TYAGI0% (1)
- Designed and Detailed According To IS 456 As An Ordinary Moment Resisting Frame Also Called Ordinary Concrete FrameDokument3 SeitenDesigned and Detailed According To IS 456 As An Ordinary Moment Resisting Frame Also Called Ordinary Concrete FrameAnonymous Gye18jNoch keine Bewertungen
- Normal and Tangential Components of AccelerationDokument8 SeitenNormal and Tangential Components of AccelerationihtishamqabidNoch keine Bewertungen
- Analysis of Trusses Method JointDokument2 SeitenAnalysis of Trusses Method JointMelvin Esguerra50% (2)
- Identify The Following: Cien 3090 Construction Materials & Testing Midterm ExamDokument1 SeiteIdentify The Following: Cien 3090 Construction Materials & Testing Midterm Examacurvz2005Noch keine Bewertungen
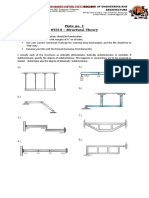
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityDokument4 SeitenPlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadNoch keine Bewertungen
- Guidebook for Road Construction and Maintenance Management InspectionsDokument38 SeitenGuidebook for Road Construction and Maintenance Management InspectionsElvin G. Tactac100% (1)
- Ce 208Dokument58 SeitenCe 208julesNoch keine Bewertungen
- Normal StressDokument7 SeitenNormal StressHueyNoch keine Bewertungen
- Seismic Resistant Design of Structures Course Outlines MSc. in Earthquake Engineering 2021Dokument2 SeitenSeismic Resistant Design of Structures Course Outlines MSc. in Earthquake Engineering 2021prraaddeej chatelNoch keine Bewertungen
- "An Experimental Study On Rubberized Concrete": Shri Venkateshwara University Gajraula Uttar Pradesh 2017-18Dokument9 Seiten"An Experimental Study On Rubberized Concrete": Shri Venkateshwara University Gajraula Uttar Pradesh 2017-18Kapil DevNoch keine Bewertungen
- Macaulay's Method 0910Dokument100 SeitenMacaulay's Method 0910aflinton100% (1)
- 3 Hinged ArchDokument17 Seiten3 Hinged Archsatyakam87453980% (10)
- Soil Compaction: Standard and Modified Proctor TestsDokument31 SeitenSoil Compaction: Standard and Modified Proctor TestsShamoyal KhanNoch keine Bewertungen
- Engg MechanicsDokument151 SeitenEngg MechanicsMartin De Boras PragashNoch keine Bewertungen
- Unit 1 Solid MechanicsDokument21 SeitenUnit 1 Solid MechanicsEdison Chandraseelan67% (3)
- Lateral Earth PressureDokument37 SeitenLateral Earth PressureMuhammad Hussain AbbasNoch keine Bewertungen
- Module 2: Labor Computation: MobilizationDokument33 SeitenModule 2: Labor Computation: Mobilizationapriljoy angelesNoch keine Bewertungen
- Geotechnical Engineering - Course OutlineDokument10 SeitenGeotechnical Engineering - Course OutlineJoshua John JulioNoch keine Bewertungen
- Steif Chapter 4 ExcerptDokument12 SeitenSteif Chapter 4 ExcerptbmyertekinNoch keine Bewertungen
- How To Draw A Semi-Log GraphDokument5 SeitenHow To Draw A Semi-Log GraphSri KondabattulaNoch keine Bewertungen
- Assignment 2 Soil MechanicsDokument2 SeitenAssignment 2 Soil Mechanicsbashiir warsameNoch keine Bewertungen
- Overviews of StaticsDokument70 SeitenOverviews of StaticsJacous WcyNoch keine Bewertungen
- Construction Master Specs Guide to CSI FormatDokument2 SeitenConstruction Master Specs Guide to CSI FormatMark Roger II HuberitNoch keine Bewertungen
- Quantity SurveyingDokument6 SeitenQuantity SurveyingEmmanuel Sto TomasNoch keine Bewertungen
- FLUID MECHANICS Lab ManualDokument65 SeitenFLUID MECHANICS Lab ManualPaulNoch keine Bewertungen
- Indian Standard: Methods of Test For Aggregates For ConcreteDokument24 SeitenIndian Standard: Methods of Test For Aggregates For ConcreteRaghav TiwaryNoch keine Bewertungen
- Static Force Analysis of MechanismsDokument2 SeitenStatic Force Analysis of MechanismsAvinash VadivelNoch keine Bewertungen
- Chapter 6 Force Analysis of The MechanismDokument37 SeitenChapter 6 Force Analysis of The MechanismHaile SimachewNoch keine Bewertungen
- ME8594 Dynamics of Machines Question BankDokument34 SeitenME8594 Dynamics of Machines Question BankJaya RajNoch keine Bewertungen
- Degree of FreedomDokument8 SeitenDegree of Freedommuddassir razzaqNoch keine Bewertungen
- TOM-Introduction to Theory of MachinesDokument8 SeitenTOM-Introduction to Theory of MachinesOk SokNoch keine Bewertungen
- Mechanism of Machinery Test 1 2010 E.C (Summer Students)Dokument3 SeitenMechanism of Machinery Test 1 2010 E.C (Summer Students)Agare TubeNoch keine Bewertungen
- Learning and Teaching StylesDokument10 SeitenLearning and Teaching StylesCiobaniuc AdinaNoch keine Bewertungen
- Mechanism of Machiney Test 3 2010 E.CDokument1 SeiteMechanism of Machiney Test 3 2010 E.CAgare TubeNoch keine Bewertungen
- Mechanism of Machinery Velocity Analysis WorksheetDokument4 SeitenMechanism of Machinery Velocity Analysis WorksheetAgare Tube0% (1)
- Movie Love QuotesDokument2 SeitenMovie Love QuotesAgare TubeNoch keine Bewertungen
- Experment On Watt and Porter GovernorDokument7 SeitenExperment On Watt and Porter GovernorAgare TubeNoch keine Bewertungen
- Dynamic Force Analysis of MechanismDokument21 SeitenDynamic Force Analysis of MechanismAgare TubeNoch keine Bewertungen
- Assignment On Rigid Body DynamicsDokument9 SeitenAssignment On Rigid Body DynamicsKaveesh KulkarniNoch keine Bewertungen
- Cross-Sectional PropertiesDokument13 SeitenCross-Sectional PropertiesWint Thu HtunNoch keine Bewertungen
- The Containment of Disk Bunt Fragments by Cylindrical ShellsDokument10 SeitenThe Containment of Disk Bunt Fragments by Cylindrical ShellsJeff SauckNoch keine Bewertungen
- Rotational Equilibrium and Rotational Dynamics StudentDokument13 SeitenRotational Equilibrium and Rotational Dynamics StudentMark PaulNoch keine Bewertungen
- Chapter 18 PDFDokument91 SeitenChapter 18 PDF이희인Noch keine Bewertungen
- CH-7 Rotational Motion Worksheet-1Dokument2 SeitenCH-7 Rotational Motion Worksheet-1negishreshth1985Noch keine Bewertungen
- Chemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesDokument9 SeitenChemistry 21b Spectroscopy - Lecture # 5: Rotation of Polyatomic MoleculesMddl2aNoch keine Bewertungen
- Angular Momentum - Wikipedia PDFDokument15 SeitenAngular Momentum - Wikipedia PDFPuneet PriyangueNoch keine Bewertungen
- 1101a B.P.S. Xi Physics McqsDokument45 Seiten1101a B.P.S. Xi Physics McqsPraveen Maram100% (1)
- Blow Up Syllabus: I Puc Physics - 33 (Theory) Unit-I (2 Hours)Dokument19 SeitenBlow Up Syllabus: I Puc Physics - 33 (Theory) Unit-I (2 Hours)Adithya SRKianNoch keine Bewertungen
- Solving FSI Solving FSI Applications Using ANSYS Mechanical and CFXDokument26 SeitenSolving FSI Solving FSI Applications Using ANSYS Mechanical and CFXRajeuv GovindanNoch keine Bewertungen
- Common Test 3 C Xi - 2024o1s&o2s - 26 09 22Dokument21 SeitenCommon Test 3 C Xi - 2024o1s&o2s - 26 09 22LuckyNoch keine Bewertungen
- Engineering Mechanics Hand Book PDFDokument27 SeitenEngineering Mechanics Hand Book PDFShîvà Èshwar ValmïkïNoch keine Bewertungen
- Spacecraft Inertia Estimation Via Constrained Squares: LeastDokument6 SeitenSpacecraft Inertia Estimation Via Constrained Squares: LeastVincenzo PesceNoch keine Bewertungen
- Control Systems IntroductionDokument100 SeitenControl Systems Introductionالزهور لخدمات الانترنيتNoch keine Bewertungen
- New Problem Sheet No. 6.3: (Products of Inertia and Transfer and Rotation of Axis)Dokument4 SeitenNew Problem Sheet No. 6.3: (Products of Inertia and Transfer and Rotation of Axis)Jaiho RandaNoch keine Bewertungen
- Engineering Mechanics Question Paper Code 1Dokument6 SeitenEngineering Mechanics Question Paper Code 1Mohanavelu PalaniswamyNoch keine Bewertungen
- Properties of SectionsDokument10 SeitenProperties of SectionsWatonic IsaacoNoch keine Bewertungen
- Phy 115 Dynamics of Rigid BodyDokument16 SeitenPhy 115 Dynamics of Rigid Bodyabdulmaliqopeyemi04Noch keine Bewertungen
- 12043Dokument4 Seiten12043S84SNoch keine Bewertungen
- 6 - Periodic Motion and Air DampingDokument3 Seiten6 - Periodic Motion and Air DampingIsuru UdaraNoch keine Bewertungen
- Newton's Laws of Motion Link Segment ModelDokument10 SeitenNewton's Laws of Motion Link Segment ModelHossein NajjarzadeNoch keine Bewertungen
- FANUC AC SPINDLE MOTOR #+ SERIES GUIDEDokument128 SeitenFANUC AC SPINDLE MOTOR #+ SERIES GUIDEJesus Alberto RIVERA /CALVEK AUTOMATIONNoch keine Bewertungen
- General Certificate of Education (Adv - Level) Examination, 2013 %%%%%%%physics%%%%%%%% Grade 13-2 Term 2013 Paper 3 Time 3hours Part BDokument8 SeitenGeneral Certificate of Education (Adv - Level) Examination, 2013 %%%%%%%physics%%%%%%%% Grade 13-2 Term 2013 Paper 3 Time 3hours Part BharshanauocNoch keine Bewertungen
- AP Rotation Review 13 SCDokument24 SeitenAP Rotation Review 13 SCHary KrizNoch keine Bewertungen
- 1 Kater's PendulumDokument4 Seiten1 Kater's PendulumSatyaki ChowdhuryNoch keine Bewertungen
- I PU MCQs FinalDokument48 SeitenI PU MCQs Finalshaziyabanu1764Noch keine Bewertungen
- Syllabus - Civil EnggDokument129 SeitenSyllabus - Civil EnggAnkita SinghNoch keine Bewertungen
- Rotor-Dynamics Analysis ProcessDokument16 SeitenRotor-Dynamics Analysis ProcessLaksh ManNoch keine Bewertungen
- 1 2 0.070 KG 0 Moment of Inertia .250 M 2 0.035kg 0.500 M 1 of 2 0. The 010 2 Coil KGMDokument2 Seiten1 2 0.070 KG 0 Moment of Inertia .250 M 2 0.035kg 0.500 M 1 of 2 0. The 010 2 Coil KGMmannarNoch keine Bewertungen