Das könnte Ihnen auch gefallen
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedVon EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNoch keine Bewertungen
- Advanced C: - Sushma - UkilDokument117 SeitenAdvanced C: - Sushma - UkilRamachandram JangiliNoch keine Bewertungen
- Advanced C: - UdayDokument117 SeitenAdvanced C: - UdayRaghavendra Rajendra Basvan100% (1)
- Advanced CDokument117 SeitenAdvanced Capi-3776776100% (1)
- Java Performance Optimization Tips & Interview QuestionsDokument12 SeitenJava Performance Optimization Tips & Interview QuestionsVijay KumarNoch keine Bewertungen
- Assignment - 2 (17701095)Dokument7 SeitenAssignment - 2 (17701095)MD. Abdulla Al Mottalib AshrafNoch keine Bewertungen
- Embedded C ProgrammingDokument57 SeitenEmbedded C ProgrammingPhạm Đức Sáng100% (1)
- Instruction Set ArchDokument15 SeitenInstruction Set Archshabir_usmany9296Noch keine Bewertungen
- Stack and Dynamic MemoryDokument7 SeitenStack and Dynamic MemoryMubashir Adnan QureshiNoch keine Bewertungen
- Optimizing C++/Code Optimization/faster Operations: Structure Fields OrderDokument5 SeitenOptimizing C++/Code Optimization/faster Operations: Structure Fields OrderTukang UsilNoch keine Bewertungen
- Badly Written Tips For Fast-Ish C++: Use Openmp For Very Easy ParallelisationDokument2 SeitenBadly Written Tips For Fast-Ish C++: Use Openmp For Very Easy ParallelisationWilliamSuckyNoch keine Bewertungen
- Designing An Instruction Set: Handouts: Lecture Notes, Lab 4, PS4 SolutionsDokument28 SeitenDesigning An Instruction Set: Handouts: Lecture Notes, Lab 4, PS4 Solutionsabybaby79Noch keine Bewertungen
- Lecture Week - 3 Amdahl Law 1Dokument19 SeitenLecture Week - 3 Amdahl Law 1imhafeezniaziNoch keine Bewertungen
- Advanced C: - "°º - Calypso - º°"Dokument117 SeitenAdvanced C: - "°º - Calypso - º°"Pradeep TiwariNoch keine Bewertungen
- Working With The Stack and HeapDokument25 SeitenWorking With The Stack and HeapPattalam PrajeeshNoch keine Bewertungen
- Clase de Progrea 555Dokument35 SeitenClase de Progrea 555Brayan Barboza GirónNoch keine Bewertungen
- C Programming in UnixDokument38 SeitenC Programming in UnixWatsh Rajneesh80% (5)
- Itwiki PHPDokument47 SeitenItwiki PHPwildan sudibyoNoch keine Bewertungen
- Data Logic Cells Unit3 AsicDokument34 SeitenData Logic Cells Unit3 AsicYashwanthReddyNoch keine Bewertungen
- 09 ParallelizationRecap PDFDokument62 Seiten09 ParallelizationRecap PDFgiordano manciniNoch keine Bewertungen
- A Quick Introduction To Tensorflow: Machine Learning Spring 2019Dokument22 SeitenA Quick Introduction To Tensorflow: Machine Learning Spring 2019gutou jiangNoch keine Bewertungen
- Homework 1 Solution PDFDokument5 SeitenHomework 1 Solution PDFRemon Hanna Wadie YoussefNoch keine Bewertungen
- Design and AlgorithmDokument29 SeitenDesign and AlgorithmIqra RazaqNoch keine Bewertungen
- Arma 3 Code OptimisationDokument12 SeitenArma 3 Code Optimisationt1029Noch keine Bewertungen
- CSO Cache Memory NumericalsDokument12 SeitenCSO Cache Memory NumericalsHimanshu GuptaNoch keine Bewertungen
- 06 ProfilingDokument29 Seiten06 Profilingapi-3726520Noch keine Bewertungen
- 08 Memory ManagementDokument18 Seiten08 Memory Managementcorredor2012Noch keine Bewertungen
- Parallel Programming: in C With Mpi and Openmp Michael J. QuinnDokument73 SeitenParallel Programming: in C With Mpi and Openmp Michael J. QuinnRohan PatilNoch keine Bewertungen
- Performance Tuning Mainframe Apps CompuwareDokument30 SeitenPerformance Tuning Mainframe Apps Compuwareabhik43Noch keine Bewertungen
- Advanced Computer ArchitectureDokument21 SeitenAdvanced Computer Architecturecore9418Noch keine Bewertungen
- Binary Literacy - Static - 6 - OptimizationsDokument67 SeitenBinary Literacy - Static - 6 - Optimizationsmagic_fyodorNoch keine Bewertungen
- 3-INSTRUCTION LEVEL PARALLELISM-12-Dec-2019Material - I - 12-Dec-2019 - ILP PDFDokument15 Seiten3-INSTRUCTION LEVEL PARALLELISM-12-Dec-2019Material - I - 12-Dec-2019 - ILP PDFANTHONY NIKHIL REDDYNoch keine Bewertungen
- Objective:: Memory ManagementDokument16 SeitenObjective:: Memory ManagementarabsamaNoch keine Bewertungen
- Code Optimization Techniques - Tips and TricksDokument11 SeitenCode Optimization Techniques - Tips and Tricksmansoorahmed86Noch keine Bewertungen
- Operating Systems: Chapter 3: Memory ManagementDokument51 SeitenOperating Systems: Chapter 3: Memory ManagementMultiple Criteria DssNoch keine Bewertungen
- Module 5 CoaDokument11 SeitenModule 5 CoaentertainmentworldyNoch keine Bewertungen
- Not Your JobDokument62 SeitenNot Your JobKamila Vieira MartinsNoch keine Bewertungen
- C Optimization TechniquesDokument79 SeitenC Optimization TechniquesDeepak KaushalNoch keine Bewertungen
- Programming Shared Address Space PlatformsDokument44 SeitenProgramming Shared Address Space PlatformsKIRAN SAVANDENoch keine Bewertungen
- Csci 260 Study Guide-8Dokument10 SeitenCsci 260 Study Guide-8zubayerthewizardNoch keine Bewertungen
- DATA STRUCTURES-lect1Dokument97 SeitenDATA STRUCTURES-lect1Anu GauNoch keine Bewertungen
- WINSEM2018-19 - CSE2003 - ETH - SJT311 - VL2018195002472 - Reference Material I - OverviewofalgorithmDokument12 SeitenWINSEM2018-19 - CSE2003 - ETH - SJT311 - VL2018195002472 - Reference Material I - OverviewofalgorithmkumarklNoch keine Bewertungen
- Memory ManagementDokument24 SeitenMemory Managementanju kNoch keine Bewertungen
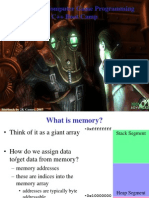
- C BootCampDokument82 SeitenC BootCampCharles Hans HuangNoch keine Bewertungen
- CachelabDokument10 SeitenCachelab张凡Noch keine Bewertungen
- Programming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarDokument67 SeitenProgramming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarshoNoch keine Bewertungen
- Lec 2Dokument44 SeitenLec 2Mado SaeedNoch keine Bewertungen
- Janice Noynay Cabardo: BSCS, MIT (Units)Dokument15 SeitenJanice Noynay Cabardo: BSCS, MIT (Units)Erwin SonNoch keine Bewertungen
- C CodingDokument4 SeitenC CodingRohith KaushikNoch keine Bewertungen
- SPARC Architecture NotesDokument13 SeitenSPARC Architecture NotesKhang VuNoch keine Bewertungen
- 26 Parallel AlgorithmsDokument24 Seiten26 Parallel Algorithmsabhijeet.pundkar2021Noch keine Bewertungen
- Data Structures RPI Spring 2017 Lecture NotesDokument166 SeitenData Structures RPI Spring 2017 Lecture NotesZack NawrockiNoch keine Bewertungen
- Practical 1Dokument8 SeitenPractical 1Chidera AbanuloNoch keine Bewertungen
- Cache and Caching: Electrical and Electronic EngineeringDokument15 SeitenCache and Caching: Electrical and Electronic EngineeringEnock OmariNoch keine Bewertungen
- COA UNIT-III Parallel ProcessorsDokument51 SeitenCOA UNIT-III Parallel ProcessorsDevika csbsNoch keine Bewertungen
- EE204 - Computer Architecture Course ProjectDokument7 SeitenEE204 - Computer Architecture Course ProjectSuneelKumarChauhanNoch keine Bewertungen
- IXY 3Pf7Eei5Kg7DUflKxA Course Notes MOOC IODokument36 SeitenIXY 3Pf7Eei5Kg7DUflKxA Course Notes MOOC IOДима ДаньковNoch keine Bewertungen
- C & C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesVon EverandC & C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNoch keine Bewertungen
- Build Your Own Distributed Compilation Cluster: A Practical WalkthroughVon EverandBuild Your Own Distributed Compilation Cluster: A Practical WalkthroughNoch keine Bewertungen
- Arduino Bluetooth Controlled Car Project ReportDokument9 SeitenArduino Bluetooth Controlled Car Project ReportSyed Adil Javed100% (1)
- X24C44 256 Bit 16 X 16 Bit: Features DescriptionDokument16 SeitenX24C44 256 Bit 16 X 16 Bit: Features DescriptionMarinaBogaoNoch keine Bewertungen
- Lab 11Dokument2 SeitenLab 11Peter KongNoch keine Bewertungen
- CISP 1610 - Programming in C++ Final Examination (Tax Calculation)Dokument3 SeitenCISP 1610 - Programming in C++ Final Examination (Tax Calculation)SolutionZIPNoch keine Bewertungen
- Computer Abbreviations in PDFDokument4 SeitenComputer Abbreviations in PDFMarian Jakielou Leona SomeraNoch keine Bewertungen
- Mod Menu Log - Com - Roblox.clientDokument275 SeitenMod Menu Log - Com - Roblox.clientmhdyvnijadNoch keine Bewertungen
- Postgres For InterviewDokument15 SeitenPostgres For InterviewSumit K100% (1)
- At CommandDokument9 SeitenAt CommandvisaguyNoch keine Bewertungen
- Pandas 2.0 - A Game-Changer For Data Scientists - Towards Data ScienceDokument18 SeitenPandas 2.0 - A Game-Changer For Data Scientists - Towards Data Sciencevan maiNoch keine Bewertungen
- Implementation Cloud Storage Google Drive (English)Dokument20 SeitenImplementation Cloud Storage Google Drive (English)Hafizh Zaldy AlviansyahNoch keine Bewertungen
- Quiz 2 Fall 2021Dokument5 SeitenQuiz 2 Fall 2021Rayan Al GhawiNoch keine Bewertungen
- DBMS NotesDokument3 SeitenDBMS Notesnin culusNoch keine Bewertungen
- BDA-MapReduce (1) 5rfgy656yhgvcft6Dokument60 SeitenBDA-MapReduce (1) 5rfgy656yhgvcft6Ayush JhaNoch keine Bewertungen
- Midshire Business Systems - Riso Perfect Binder BrochureDokument4 SeitenMidshire Business Systems - Riso Perfect Binder BrochureadietoppingNoch keine Bewertungen
- DCOM Secure by DefaultDokument60 SeitenDCOM Secure by DefaultEdwin Pari100% (1)
- System Service Parts IBM System x3200 M3 PDFDokument7 SeitenSystem Service Parts IBM System x3200 M3 PDFrejnanNoch keine Bewertungen
- Manual S7-1500 PDFDokument227 SeitenManual S7-1500 PDFRidwan WkNoch keine Bewertungen
- Introduction To Python Programming DBDokument132 SeitenIntroduction To Python Programming DBRiya Agrawal100% (1)
- Digit Magazine - April 2016Dokument124 SeitenDigit Magazine - April 2016Mohit PremaniNoch keine Bewertungen
- TP Debug InfoDokument198 SeitenTP Debug InfoAnju BalaNoch keine Bewertungen
- AIX Performance TuningDokument42 SeitenAIX Performance Tuningmcfaria20009603Noch keine Bewertungen
- Architectural Overview (Productname) Page 8 of 9Dokument8 SeitenArchitectural Overview (Productname) Page 8 of 9VIbhishanNoch keine Bewertungen
- Ricoh Aficio 2022 2027Dokument6 SeitenRicoh Aficio 2022 2027andykoglerNoch keine Bewertungen
- Topic 4 MicroprocessorDokument40 SeitenTopic 4 MicroprocessorKucing HitemNoch keine Bewertungen
- Marble-Tiles ReportDokument91 SeitenMarble-Tiles ReportkantheshNoch keine Bewertungen
- A Study of Grammar-Concept Understanding Problems For Web Client Programming With JavaScriptDokument5 SeitenA Study of Grammar-Concept Understanding Problems For Web Client Programming With JavaScriptthetmonNoch keine Bewertungen
- Introduction To Python: Slide 1 of 38 © NiitDokument54 SeitenIntroduction To Python: Slide 1 of 38 © NiitANKUR CHOUDHARYNoch keine Bewertungen
- ABAP Event Driven ProgrammingDokument66 SeitenABAP Event Driven ProgrammingAjit Keshari PradhanNoch keine Bewertungen
- Huawei E220 Hsdpa Usb Modem User ManualDokument45 SeitenHuawei E220 Hsdpa Usb Modem User ManualAdam HartonoNoch keine Bewertungen
- MCQDokument34 SeitenMCQRahul ItankarNoch keine Bewertungen