Das könnte Ihnen auch gefallen
- Apollo 120126023Dokument22 SeitenApollo 120126023Ahmed AbdoNoch keine Bewertungen
- Descargar Allen Bradley PLC RSLogix 500 Pro RsLinx Torrent Kickass Torrents PDFDokument5 SeitenDescargar Allen Bradley PLC RSLogix 500 Pro RsLinx Torrent Kickass Torrents PDFDiego Alejandro Gallardo IbarraNoch keine Bewertungen
- L011199 - PRONET-E Series Users Manual - V2.11Dokument198 SeitenL011199 - PRONET-E Series Users Manual - V2.11rocksodia22Noch keine Bewertungen
- PCB Connection Drawing For MP-RT Series PDFDokument9 SeitenPCB Connection Drawing For MP-RT Series PDFEmil MladenovNoch keine Bewertungen
- Dynamo Air Hockey Wiring Diagram: Coin DoorDokument1 SeiteDynamo Air Hockey Wiring Diagram: Coin Doorcamarin40Noch keine Bewertungen
- TV On DVD-mst720-113Dokument3 SeitenTV On DVD-mst720-113dann2220% (1)
- JM20337 JMicronDokument2 SeitenJM20337 JMicronRuben Perez AyoNoch keine Bewertungen
- DeltaDokument3 SeitenDeltaSandroCezardeAraujoNoch keine Bewertungen
- Berger Lahr Wdp3 01x ManualDokument1 SeiteBerger Lahr Wdp3 01x ManualMatteo ErcoleNoch keine Bewertungen
- Fan Uc Manuals 1787Dokument194 SeitenFan Uc Manuals 1787Somchai Sompongpuang100% (1)
- SM-J710FN Tshoo 7Dokument44 SeitenSM-J710FN Tshoo 7JuaryMaster Kapas67% (3)
- Service Manual: 8M48A ChassisDokument97 SeitenService Manual: 8M48A ChassisSaidfa FaNoch keine Bewertungen
- Datasheet PDFDokument38 SeitenDatasheet PDFDinh Thuong CaoNoch keine Bewertungen
- USB Firmware Update Instruction Manual AVR-X2100WDokument1 SeiteUSB Firmware Update Instruction Manual AVR-X2100WAlfrdoBertNoch keine Bewertungen
- CCE Audio RC-62MPX Diagrama EsquematicoDokument5 SeitenCCE Audio RC-62MPX Diagrama Esquematicomscristiano100% (1)
- Manual: Multi-Head Automatic Embroidery MachineDokument84 SeitenManual: Multi-Head Automatic Embroidery MachineTuan NguyenNoch keine Bewertungen
- Bester 200I-St Wiring Schematic: 9.066.059-C PCBDokument1 SeiteBester 200I-St Wiring Schematic: 9.066.059-C PCBErasmo Franco SNoch keine Bewertungen
- Project Name:: PIU808 PIU804 PIU808Dokument1 SeiteProject Name:: PIU808 PIU804 PIU808Rolando Jorge Ortega100% (1)
- 07 Schematic Diagram E PDFDokument10 Seiten07 Schematic Diagram E PDFHenhen Rohendi100% (1)
- Hitachi CDH-LE32FD18 Chassis 6M80B Televisor LCD DiagramaDokument9 SeitenHitachi CDH-LE32FD18 Chassis 6M80B Televisor LCD DiagramaMario Rodriguez JuradoNoch keine Bewertungen
- Byte Con Fiden Tial Don Otc Opy: Cover SheetDokument51 SeitenByte Con Fiden Tial Don Otc Opy: Cover SheetDébo OrellanoNoch keine Bewertungen
- Interpreter ExcellonDokument24 SeitenInterpreter Excellonwindywake3910Noch keine Bewertungen
- Man Dds HardDokument418 SeitenMan Dds HardVladNoch keine Bewertungen
- Manual BaderDokument32 SeitenManual Baderlincon com.br100% (1)
- Sony KDL - 32L4000 Chasis MA2Dokument84 SeitenSony KDL - 32L4000 Chasis MA2GustavoTovarNoch keine Bewertungen
- Whirlpool JT 359 Alu PDFDokument6 SeitenWhirlpool JT 359 Alu PDFGustavo Valdez100% (2)
- User Guide English PowCom 4Dokument34 SeitenUser Guide English PowCom 4Chau TriNoch keine Bewertungen
- PSR-S700 S900 Ov2 CDokument3 SeitenPSR-S700 S900 Ov2 CAdriano Camocardi100% (1)
- KRC4 X11 External CircuitDokument1 SeiteKRC4 X11 External CircuitHerick MoscardiniNoch keine Bewertungen
- c3g Controller UnitDokument266 Seitenc3g Controller UnitElyNoch keine Bewertungen
- DELTA - IA-HMI - DOPSoft-2-00-07 - Technical Announcement - UM-EN - 20171124 PDFDokument32 SeitenDELTA - IA-HMI - DOPSoft-2-00-07 - Technical Announcement - UM-EN - 20171124 PDFLio SnNoch keine Bewertungen
- Tty Cable For s5 PLC - Siemens - Plcforum - Uz.uaDokument2 SeitenTty Cable For s5 PLC - Siemens - Plcforum - Uz.uaHafidz AlbirruNoch keine Bewertungen
- Sony HCD Gr8000Dokument16 SeitenSony HCD Gr8000alexiseu70100% (1)
- FactoryTalk View Machine Edition and PanelView Plus 6 - PanelView 7 Recipe ActiveX ControlDokument4 SeitenFactoryTalk View Machine Edition and PanelView Plus 6 - PanelView 7 Recipe ActiveX ControlGustavo MoraesNoch keine Bewertungen
- P SERIES CIAC SERVICE MANUAL 9k-24k FVDokument97 SeitenP SERIES CIAC SERVICE MANUAL 9k-24k FVAnthony Pineda ValenciaNoch keine Bewertungen
- Yaesu FT-212RH Operating ManualDokument51 SeitenYaesu FT-212RH Operating ManualYayok S. AnggoroNoch keine Bewertungen
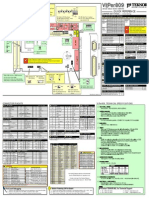
- Viper809 Motheboard Pinout DiagramDokument2 SeitenViper809 Motheboard Pinout DiagramAnonymous 60esBJZIjNoch keine Bewertungen
- CL 29z50mq Ks7dDokument86 SeitenCL 29z50mq Ks7dDavid Argote Bellido50% (4)
- Denso Errors PDFDokument144 SeitenDenso Errors PDFElyNoch keine Bewertungen
- Monitor AOC FT700 F1770 S774-CT710G-107s63Dokument1 SeiteMonitor AOC FT700 F1770 S774-CT710G-107s63Ronan Nolasco100% (1)
- Important Notes On The SINAMICS Support Package (SSP) "SSP SINAMICS V5.2 SP3 HF1"Dokument3 SeitenImportant Notes On The SINAMICS Support Package (SSP) "SSP SINAMICS V5.2 SP3 HF1"Marcos GuedesNoch keine Bewertungen
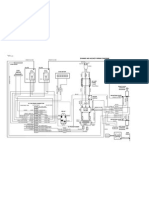
- Traction Superdrive: Slt30 Ac, Schematic ElectricalDokument1 SeiteTraction Superdrive: Slt30 Ac, Schematic ElectricalChristian BedoyaNoch keine Bewertungen
- b4 PDFDokument156 Seitenb4 PDFkeyerlinNoch keine Bewertungen
- MV 4 94v 0 Schematic DigramDokument39 SeitenMV 4 94v 0 Schematic DigramNaing TunNoch keine Bewertungen
- Hot Runner KEBA2580 220VDokument19 SeitenHot Runner KEBA2580 220VAarón DíazNoch keine Bewertungen
- AKZ8 Instruction ManualDokument44 SeitenAKZ8 Instruction ManualsunhuynhNoch keine Bewertungen
- MCAMX4 Installation GuideDokument16 SeitenMCAMX4 Installation Guidehclraj406Noch keine Bewertungen
- How To Download CoprocessorDokument2 SeitenHow To Download CoprocessorPrakash KumarNoch keine Bewertungen
- P Rack Updating ProcedureDokument9 SeitenP Rack Updating ProcedureDiego G Torres LNoch keine Bewertungen
- Ghid Utilizare DSKDokument6 SeitenGhid Utilizare DSKvalivali30Noch keine Bewertungen
- Internal SwitchDokument9 SeitenInternal SwitchSribller DribbleNoch keine Bewertungen
- TGA-B RP Test ProcedureDokument27 SeitenTGA-B RP Test ProcedureAlberto VegaNoch keine Bewertungen
- 3760 PC FAPT Ladder SetupDokument2 Seiten3760 PC FAPT Ladder SetupQuy QuyNoch keine Bewertungen
- Comandos MSC AceptacionDokument47 SeitenComandos MSC AceptacionJose GameroNoch keine Bewertungen
- Node B Integration Instructions For Ericsson 3308Dokument3 SeitenNode B Integration Instructions For Ericsson 3308Reej Thomas100% (2)
- SW DWNLDDokument53 SeitenSW DWNLDklemencicvinkoNoch keine Bewertungen
- CT LFC Procedure 07mw11Dokument64 SeitenCT LFC Procedure 07mw11VremedSoluCiones100% (1)
- DGS-3600 Series Firmware Release Notes R2.80B31 (For WW)Dokument19 SeitenDGS-3600 Series Firmware Release Notes R2.80B31 (For WW)tntenoboaNoch keine Bewertungen
- Lab Sim SetuDokument3 SeitenLab Sim SetuVishal ChetalNoch keine Bewertungen
- Baseband Training 2018-7-22Dokument39 SeitenBaseband Training 2018-7-22hassanNoch keine Bewertungen
- Galvano Terapy Topic - 6Dokument3 SeitenGalvano Terapy Topic - 6Gigi CotoraNoch keine Bewertungen
- Galvano Terapy Topic - 2Dokument3 SeitenGalvano Terapy Topic - 2Gigi CotoraNoch keine Bewertungen
- Smart S: REL. 1.X/2.X/3.XDokument80 SeitenSmart S: REL. 1.X/2.X/3.XGigi CotoraNoch keine Bewertungen
- Error Messages C3GDokument467 SeitenError Messages C3GGigi CotoraNoch keine Bewertungen
- Instruction Manual: PROFIBUS DP Slave Interface For Digital Multibus Mass Flow / Pressure / Gateway InstrumentsDokument35 SeitenInstruction Manual: PROFIBUS DP Slave Interface For Digital Multibus Mass Flow / Pressure / Gateway InstrumentsGigi CotoraNoch keine Bewertungen
- Chapter SevenDokument12 SeitenChapter SevenMagarsa BedasaNoch keine Bewertungen
- OS Installation CrosswordDokument1 SeiteOS Installation CrosswordAdrian Carl Barbin0% (1)
- Seminar HVDC Technology and Short Circuit Contribution of HVDC LightDokument36 SeitenSeminar HVDC Technology and Short Circuit Contribution of HVDC LightDurgesh ChouhanNoch keine Bewertungen
- MongoDB - Insert DocumentDokument3 SeitenMongoDB - Insert DocumentChandu ChandrakanthNoch keine Bewertungen
- 4a-Esp8266 at Instruction Set en PDFDokument68 Seiten4a-Esp8266 at Instruction Set en PDFOlasehinde Daniel OluwabunmiNoch keine Bewertungen
- CCNA Dis4 - Chapter 1 - Introducing Network Design Concepts - PPT (Compatibility Mode)Dokument94 SeitenCCNA Dis4 - Chapter 1 - Introducing Network Design Concepts - PPT (Compatibility Mode)http://heiserz.com/100% (1)
- CHAPTER 3: Big Data Adoption and Planning ConsiderationsDokument23 SeitenCHAPTER 3: Big Data Adoption and Planning ConsiderationsLadines ClarisseNoch keine Bewertungen
- SAP Data Archiving StrategyDokument33 SeitenSAP Data Archiving StrategyThaís Dalanesi100% (3)
- Module 1 - T06 Commissioning ESME - HVAC - v3.0Dokument46 SeitenModule 1 - T06 Commissioning ESME - HVAC - v3.0Muhammad AssadullahNoch keine Bewertungen
- Spos Unit 3 PPT 2022 - CompressedDokument82 SeitenSpos Unit 3 PPT 2022 - Compressedsakshi kumavatNoch keine Bewertungen
- Database Management System and ER ModellingDokument48 SeitenDatabase Management System and ER ModellingDarshi KarunarathneNoch keine Bewertungen
- 03Dokument11 Seiten03junaid_ishaqueNoch keine Bewertungen
- Samsung UFS Ring Buffer Specification v1.0.1GDokument22 SeitenSamsung UFS Ring Buffer Specification v1.0.1G杨光炜Noch keine Bewertungen
- PSK PDFDokument10 SeitenPSK PDFTikam SuvasiyaNoch keine Bewertungen
- 8.menu Driven For Transversal TreeDokument9 Seiten8.menu Driven For Transversal TreeShruti NinaweNoch keine Bewertungen
- 89 S 52Dokument8 Seiten89 S 52Ashok BalajiNoch keine Bewertungen
- Order Management ReportDokument43 SeitenOrder Management ReportedzNoch keine Bewertungen
- Hiren's Boot CD 8Dokument10 SeitenHiren's Boot CD 8api-3834725Noch keine Bewertungen
- Class 9 CH 4 Values and DatatypesDokument21 SeitenClass 9 CH 4 Values and DatatypesSANKA SAHANoch keine Bewertungen
- Doesn't Meet Our Quality RequirementsDokument1 SeiteDoesn't Meet Our Quality RequirementsYassir HaskerNoch keine Bewertungen
- CDX TractDokument36 SeitenCDX TractJonas Erik KvarnströmNoch keine Bewertungen
- PDFlib 10.0.1 API ReferenceDokument306 SeitenPDFlib 10.0.1 API ReferencekuhsdfNoch keine Bewertungen
- Less Known Solaris FeaturesDokument394 SeitenLess Known Solaris FeaturesggezaNoch keine Bewertungen
- Hpe Proliant DL325 Gen10 Server DatasheetDokument33 SeitenHpe Proliant DL325 Gen10 Server DatasheetMeela ZengNoch keine Bewertungen
- Embedded Linux LabsDokument58 SeitenEmbedded Linux LabsBenyamin Farzaneh AghajarieNoch keine Bewertungen
- ITWM132 - Module 0 - ReviewDokument9 SeitenITWM132 - Module 0 - ReviewRizeAeyahNoch keine Bewertungen
- Lab Workbook-Informatica EDC Migrating To MSFT AZURE DWMDokument17 SeitenLab Workbook-Informatica EDC Migrating To MSFT AZURE DWMAmit BhartiyaNoch keine Bewertungen
- LogDokument166 SeitenLogOmar MalekNoch keine Bewertungen
- CSCE 3600: Systems Programming: Assignment 2 - Sockets & SynchronizationDokument3 SeitenCSCE 3600: Systems Programming: Assignment 2 - Sockets & SynchronizationFərruxXəmənNoch keine Bewertungen
- LIN-Spec Pac1 3 PDFDokument98 SeitenLIN-Spec Pac1 3 PDFveereshascribdNoch keine Bewertungen