Das könnte Ihnen auch gefallen
- TTL LS (Y Series 5400, 7400, 74H, 74S, 74ALS, 74AS, 74F) Components ListDokument171 SeitenTTL LS (Y Series 5400, 7400, 74H, 74S, 74ALS, 74AS, 74F) Components ListASOCIACION ATECUBO100% (1)
- Controls For Electric & Gas Forklifts, Golf CartsDokument124 SeitenControls For Electric & Gas Forklifts, Golf CartsFaizal Jamal60% (10)
- FPGA-Based Control For Electric Vehicle and Hybrid Electric Vehicle Power ElectronicsDokument24 SeitenFPGA-Based Control For Electric Vehicle and Hybrid Electric Vehicle Power Electronicsdeepak_27Noch keine Bewertungen
- Fpga Based Fuzzy Logic Controller For Electric VehicleDokument14 SeitenFpga Based Fuzzy Logic Controller For Electric Vehiclekavicharan414Noch keine Bewertungen
- Model-Based Design Streamlines Embedded Motor Control System DevelopmentDokument8 SeitenModel-Based Design Streamlines Embedded Motor Control System DevelopmentPasha ZubkovNoch keine Bewertungen
- Compact RioDokument5 SeitenCompact RioAu Yong Tien TuckNoch keine Bewertungen
- Simple Control System For A Stepper and DCDokument24 SeitenSimple Control System For A Stepper and DCbmrajahNoch keine Bewertungen
- Development of FPGA Based Smart Controller For Speed Control of BLDC MotorDokument7 SeitenDevelopment of FPGA Based Smart Controller For Speed Control of BLDC MotorInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- 3-Phase Switched Reluctance (SR) Sensorless Motor Control Using A 56F80x, 56F8100 or 56F8300 DeviceDokument64 Seiten3-Phase Switched Reluctance (SR) Sensorless Motor Control Using A 56F80x, 56F8100 or 56F8300 DevicekarthicgroupNoch keine Bewertungen
- Devloper BoardDokument82 SeitenDevloper Boardpukhraj titreNoch keine Bewertungen
- Irjet V7i6300Dokument8 SeitenIrjet V7i6300Ugwu ArinzeNoch keine Bewertungen
- Altera Five Ways To Build Flexibility Into Industrial Applications With FPGAsDokument15 SeitenAltera Five Ways To Build Flexibility Into Industrial Applications With FPGAskn65238859Noch keine Bewertungen
- Qorvo Power Application Controllers For Brushless DC and Permament Magnet Synchronous Motors BrochureDokument4 SeitenQorvo Power Application Controllers For Brushless DC and Permament Magnet Synchronous Motors BrochureraisviranNoch keine Bewertungen
- Manual of Jupiter Drive V.01Dokument137 SeitenManual of Jupiter Drive V.01Tee Kok ShengNoch keine Bewertungen
- Jupiter DriveDokument138 SeitenJupiter DriveTee Kok ShengNoch keine Bewertungen
- SOPC-Based Servo Control System For The XYZ Table: Third PrizeDokument19 SeitenSOPC-Based Servo Control System For The XYZ Table: Third PrizeJada DennisNoch keine Bewertungen
- Arm Cortex (LPC 2148) Based Motor Speed ControlDokument72 SeitenArm Cortex (LPC 2148) Based Motor Speed ControlUday Wankar100% (2)
- An1914 PDFDokument56 SeitenAn1914 PDFUpama Das100% (1)
- Vehicle Control UnitDokument20 SeitenVehicle Control Unit시드세흐리아르알리나크비Noch keine Bewertungen
- Design-and-Implementation-of-PID-Controller-for-Motor-Position-ControlDokument5 SeitenDesign-and-Implementation-of-PID-Controller-for-Motor-Position-ControlOwais Ahmad KhanNoch keine Bewertungen
- Ref 47 PDFDokument6 SeitenRef 47 PDFAli H. NumanNoch keine Bewertungen
- 3-Phase Switched Reluctance Motor Control With Encoder Using DSP56F80xDokument56 Seiten3-Phase Switched Reluctance Motor Control With Encoder Using DSP56F80xYusuf Ilker öztürkNoch keine Bewertungen
- Labview Fpga Implementation of A Pid Controller For D.C. Motor Speed ControlDokument6 SeitenLabview Fpga Implementation of A Pid Controller For D.C. Motor Speed ControlZaheer AbbasNoch keine Bewertungen
- ABB ACS580MV Flyer 3bht490774r0001 Rev. A - enDokument2 SeitenABB ACS580MV Flyer 3bht490774r0001 Rev. A - enRadu BabauNoch keine Bewertungen
- Other Interfaces and Technologies: Contents at A GlanceDokument19 SeitenOther Interfaces and Technologies: Contents at A GlanceDrift GeeNoch keine Bewertungen
- Data SheetDokument211 SeitenData SheetYana PrikitiwNoch keine Bewertungen
- FPGAs Enable Energy-Efficient Motor Control - Industrial Embedded SystemsDokument7 SeitenFPGAs Enable Energy-Efficient Motor Control - Industrial Embedded SystemsRintuMathunniNoch keine Bewertungen
- DatasheetDokument106 SeitenDatasheetjose mojikNoch keine Bewertungen
- S7-300 PLC in RTGDokument72 SeitenS7-300 PLC in RTGmunawar munawarNoch keine Bewertungen
- PAC30 CpuDokument6 SeitenPAC30 CpuMuh Talib HRNoch keine Bewertungen
- DC Motor Speed C BcontrolDokument6 SeitenDC Motor Speed C BcontrolRoger RozarioNoch keine Bewertungen
- Versamax : Important Product InformationDokument16 SeitenVersamax : Important Product InformationLeidy Julieth GonzalezNoch keine Bewertungen
- Versamax : Important Product InformationDokument16 SeitenVersamax : Important Product InformationLeidy Julieth GonzalezNoch keine Bewertungen
- Versamax : Important Product InformationDokument16 SeitenVersamax : Important Product InformationLeidy Julieth GonzalezNoch keine Bewertungen
- Versamax : Important Product InformationDokument16 SeitenVersamax : Important Product InformationLeidy Julieth GonzalezNoch keine Bewertungen
- Versamax : Important Product InformationDokument16 SeitenVersamax : Important Product InformationLeidy Julieth GonzalezNoch keine Bewertungen
- Guide to J1587/J1708 Datalink SystemDokument9 SeitenGuide to J1587/J1708 Datalink SystemEbied Yousif AlyNoch keine Bewertungen
- Zigbee Based Speed ControlDokument68 SeitenZigbee Based Speed Controlbvkarthik2711Noch keine Bewertungen
- Ec14001 Imdc01en Brochure RZ WebDokument26 SeitenEc14001 Imdc01en Brochure RZ Webgowtham.vNoch keine Bewertungen
- Implementation of FPGA Based 3-Phase Inverter FED BLDC MotorDokument5 SeitenImplementation of FPGA Based 3-Phase Inverter FED BLDC Motortakaca40Noch keine Bewertungen
- Stepper Motor Implementation On FPGA (1) With 1.5 FinalDokument61 SeitenStepper Motor Implementation On FPGA (1) With 1.5 Finalswati sakhare100% (1)
- Drive Low Voltage AC Drives: ACS 800 Catalogue Related Tools and AccessoriesDokument28 SeitenDrive Low Voltage AC Drives: ACS 800 Catalogue Related Tools and Accessoriesvuthahor316864Noch keine Bewertungen
- User's Guide Version 3.1: SMC-2000 Multi-Axis Motion ControllerDokument364 SeitenUser's Guide Version 3.1: SMC-2000 Multi-Axis Motion ControllerHaroldNoch keine Bewertungen
- Design of Motion Control System For Robot Car Based On DSPDokument4 SeitenDesign of Motion Control System For Robot Car Based On DSPKurshad SunnyNoch keine Bewertungen
- 6ra7031 6dv62 0 Siomreg DC Converter Siemens ManualDokument234 Seiten6ra7031 6dv62 0 Siomreg DC Converter Siemens ManualBorislav ChavdarovNoch keine Bewertungen
- "Speed Control and Protection of Induction Motor Using Internet of ThingDokument34 Seiten"Speed Control and Protection of Induction Motor Using Internet of ThingDarshan0% (1)
- ACS880 07 FlyerDokument2 SeitenACS880 07 Flyerbogner22Noch keine Bewertungen
- Field Programmable Gate Array Based Speed Control of BLDC MotorDokument6 SeitenField Programmable Gate Array Based Speed Control of BLDC MotorVidhya M PNoch keine Bewertungen
- Allen Bradley MCC ArchitectureDokument2 SeitenAllen Bradley MCC Architecturewvwinters100% (2)
- SimpleBGC 32bit Manual 2 6x Eng PDFDokument95 SeitenSimpleBGC 32bit Manual 2 6x Eng PDFVivek MauryaNoch keine Bewertungen
- Maximum Retail Prices: For Industrial Automation Products - AC Drives, Soft-Starters, PLC & HMIDokument27 SeitenMaximum Retail Prices: For Industrial Automation Products - AC Drives, Soft-Starters, PLC & HMIPopatlal MrNoch keine Bewertungen
- CPD7 - B1 Lecture Notes - 6 SCADA Components and Configuration PDFDokument89 SeitenCPD7 - B1 Lecture Notes - 6 SCADA Components and Configuration PDFjjhenNoch keine Bewertungen
- MPT 612Dokument2 SeitenMPT 612arunghandwalNoch keine Bewertungen
- Interfacing A Stepper Motor With ARM Controller LPC2148Dokument9 SeitenInterfacing A Stepper Motor With ARM Controller LPC2148Rahul Sharma100% (2)
- Sm-Sinamics S120Dokument55 SeitenSm-Sinamics S120preferredcustomerNoch keine Bewertungen
- Hardware Engineers Guide To A Brushless-DC Motor Controller Design and ChallengesDokument6 SeitenHardware Engineers Guide To A Brushless-DC Motor Controller Design and Challengesuzair aminNoch keine Bewertungen
- Report BibilographDokument7 SeitenReport BibilographSuhas M AngadiNoch keine Bewertungen
- USER MANUAL Mab - 51Dokument93 SeitenUSER MANUAL Mab - 51Pushpinder Singh KhalsaNoch keine Bewertungen
- Using The 8096: September 1987Dokument24 SeitenUsing The 8096: September 1987Rakesh Kumar DNoch keine Bewertungen
- FPGA TechnologyDokument26 SeitenFPGA TechnologyvinaypantraNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- A New Family of Isolated Zero-Voltage-Switched ConvertersDokument7 SeitenA New Family of Isolated Zero-Voltage-Switched ConvertersASOCIACION ATECUBONoch keine Bewertungen
- David José Martinez Díaz Production Cost Models With Regard To Liberalised Electricity Markets 2008Dokument144 SeitenDavid José Martinez Díaz Production Cost Models With Regard To Liberalised Electricity Markets 2008ASOCIACION ATECUBONoch keine Bewertungen
- Embedding Flash Programming APIs for TMS320LF240x ApplicationsDokument28 SeitenEmbedding Flash Programming APIs for TMS320LF240x ApplicationsASOCIACION ATECUBONoch keine Bewertungen
- tms320f243 PDFDokument119 Seitentms320f243 PDFASOCIACION ATECUBONoch keine Bewertungen
- David José Martinez Díaz Production Cost Models With Regard To Liberalised Electricity Markets 2008Dokument144 SeitenDavid José Martinez Díaz Production Cost Models With Regard To Liberalised Electricity Markets 2008ASOCIACION ATECUBONoch keine Bewertungen
- Finite Element Method Magnetics: User's ManualDokument79 SeitenFinite Element Method Magnetics: User's ManualASOCIACION ATECUBONoch keine Bewertungen
- EpistemologyDokument18 SeitenEpistemologySumera SarwarNoch keine Bewertungen
- Choosing The Appropriate Simulator Configuration in Code Composer Studio IDEDokument21 SeitenChoosing The Appropriate Simulator Configuration in Code Composer Studio IDEASOCIACION ATECUBONoch keine Bewertungen
- Introduction To Electrostatic FEA With BELADokument9 SeitenIntroduction To Electrostatic FEA With BELAASOCIACION ATECUBONoch keine Bewertungen
- Motorola Semiconductor Application Note: Creating Efficient C Code For The MC68HC08Dokument16 SeitenMotorola Semiconductor Application Note: Creating Efficient C Code For The MC68HC08ASOCIACION ATECUBONoch keine Bewertungen
- Thyristor PDFDokument10 SeitenThyristor PDFMihir HembramNoch keine Bewertungen
- System Block Diagram PDFDokument3 SeitenSystem Block Diagram PDFASOCIACION ATECUBONoch keine Bewertungen
- A System For Speed and Torque Control of DC Motors With Application To Small Snake RobotsDokument6 SeitenA System For Speed and Torque Control of DC Motors With Application To Small Snake RobotsASOCIACION ATECUBONoch keine Bewertungen
- Project ProposalDokument12 SeitenProject ProposalMuhammad Taskeen RazaNoch keine Bewertungen
- TareaDokument3 SeitenTareaASOCIACION ATECUBONoch keine Bewertungen
- Start: Training Pathway: E-011-1 Industrial Electronic Junior Technician - EquipmentDokument3 SeitenStart: Training Pathway: E-011-1 Industrial Electronic Junior Technician - EquipmentzamriabdNoch keine Bewertungen
- 2010 Ford Pickup SVT RaptorDokument115 Seiten2010 Ford Pickup SVT RaptorMiguel Quema100% (1)
- Ahu ControlDokument13 SeitenAhu ControleslamNoch keine Bewertungen
- Canon PIXMA MP830 Parts CatalogDokument8 SeitenCanon PIXMA MP830 Parts Catalogaperez999Noch keine Bewertungen
- Massey Ferguson Mf8240 Parts CatalogueDokument20 SeitenMassey Ferguson Mf8240 Parts Cataloguesusan100% (29)
- Tlocrt Podne Ploče - Donja Zona Tlocrt Podne Ploče - Gornja ZonaDokument1 SeiteTlocrt Podne Ploče - Donja Zona Tlocrt Podne Ploče - Gornja ZonaMario VitezNoch keine Bewertungen
- 2006 Can-Am Outlander Max 400 H.O. XT ManualDokument164 Seiten2006 Can-Am Outlander Max 400 H.O. XT Manualprotrek777Noch keine Bewertungen
- Instrumentation valves and accessoriesDokument20 SeitenInstrumentation valves and accessorieshisaj4uNoch keine Bewertungen
- Datasheet PDFDokument5 SeitenDatasheet PDFFIMNoch keine Bewertungen
- TG Probe Info PDFDokument4 SeitenTG Probe Info PDFLuciano RezendeNoch keine Bewertungen
- Mcmurdo Smartfind Nav-7 Navtex User ManualDokument52 SeitenMcmurdo Smartfind Nav-7 Navtex User ManualtariktunadNoch keine Bewertungen
- Burn-In 101Dokument4 SeitenBurn-In 101api-281858981Noch keine Bewertungen
- Multi-Outlet Drum Pumps GSEDokument4 SeitenMulti-Outlet Drum Pumps GSEtranceinttNoch keine Bewertungen
- Mercedes W245 Owner's ManualDokument262 SeitenMercedes W245 Owner's Manualgelu uNoch keine Bewertungen
- Circuits Gallery: Most Simple FM Transmitter Circuit DiagramDokument16 SeitenCircuits Gallery: Most Simple FM Transmitter Circuit DiagramVictor ImehNoch keine Bewertungen
- Last Herb 204 SLDokument3 SeitenLast Herb 204 SLlastbikesNoch keine Bewertungen
- CabineDokument29 SeitenCabineFaustoNoch keine Bewertungen
- 316 HO Version Coding IC 98-99Dokument2 Seiten316 HO Version Coding IC 98-99arkhom1Noch keine Bewertungen
- Alabang MCSPDokument229 SeitenAlabang MCSP[AP-STUDENT] Ina Rose LaquiNoch keine Bewertungen
- Free-flow nose-to-side check valve technical detailsDokument2 SeitenFree-flow nose-to-side check valve technical detailssnsnagarajanNoch keine Bewertungen
- Buried Filled Cables Type CefeDokument5 SeitenBuried Filled Cables Type CefeKhaled BellegdyNoch keine Bewertungen
- Voltage PDFDokument44 SeitenVoltage PDFAntonioPierreNoch keine Bewertungen
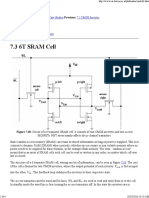
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDokument4 Seiten7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNoch keine Bewertungen
- Chapter 1 - Introduction To Pipe Fabrication 5: 3 © Westone Services 2013Dokument1 SeiteChapter 1 - Introduction To Pipe Fabrication 5: 3 © Westone Services 2013Mohamed amine El mtalakNoch keine Bewertungen
- Pressure Transmitter Specification Sheet: GeneralDokument1 SeitePressure Transmitter Specification Sheet: GeneralFranklin J Talero BNoch keine Bewertungen
- Addressing Modes in 8051 MicrocontrollerDokument20 SeitenAddressing Modes in 8051 MicrocontrollerSia SiaNoch keine Bewertungen
- Oil Module: C F D H ADokument2 SeitenOil Module: C F D H Adaniel_jorge_10Noch keine Bewertungen
- 3com Officeconnect Switch 8Dokument2 Seiten3com Officeconnect Switch 8tengersamNoch keine Bewertungen
- Inspection and Testing Procedures for Plug ValvesDokument8 SeitenInspection and Testing Procedures for Plug ValvesahmedNoch keine Bewertungen